智能车图像处理去畸变教程

逆透视请参考:
去畸变+逆透视请参考:
去畸变:如下
1.简介
对于镜头而言,畸变是一种十分常见的现象,如本是方形的棋盘,边界被扭曲成曲线 。还有同样受到扭曲的赛道。
对于镜头而言,同等条件下一般度数越大,视野越广,所造成的畸变也越严重
 编辑
编辑
优点:
使用指针映射去畸变数组,只需要初始化映射一次,后续不需要时间
通用性强,可移植性高
保证视野不变条件下优化图像质量。
2.去畸变所需工具、环境
请确保过程中所有采集到的图片出自同一相机与镜头,且分辨率全部相同
1.棋盘标定图
(1)放置在同一个文件夹中(数量越多越好1,0张以上,推荐50张左右)
(2)需要将整个棋盘标定图拍摄进去,越清晰越好
 编辑
编辑
2.拍摄的赛道图,用于观察去畸变效果
仅用作观察效果,无特殊要求

3.去畸变上位机
在win7及以下系统无法打开
3.去畸变原理
不同的摄像头搭配不同的镜头,会有不一样的内参,所以,只需要提前测定相机内参即可在后续中方便去畸变。
具体原理请自行搜索图像处理-去畸变。
4.通过上位机求取相机内参
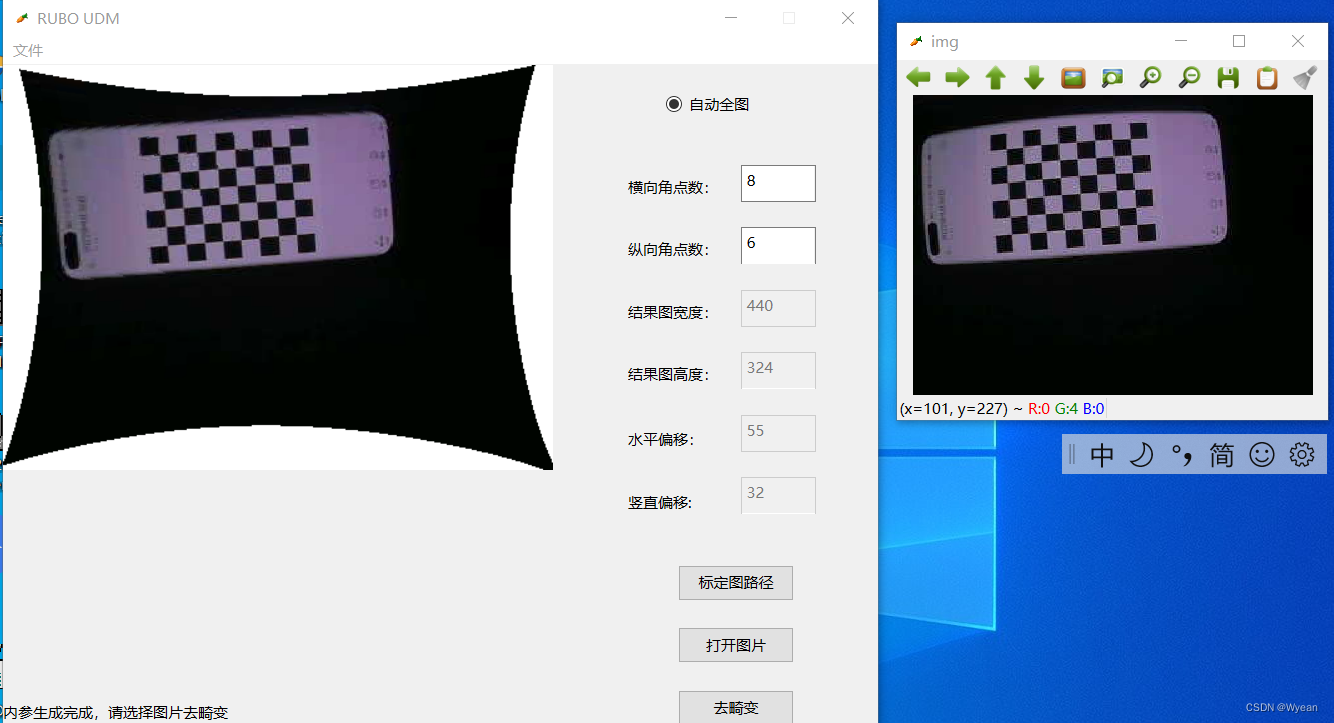
自动全图:如果勾选,去畸变的图会涵盖全图内容;若取消勾选,去畸变后的图会损失部分视野。注意:在桶形畸变下,如果勾选,会导致结果混乱,建议取消勾选。
横向、纵向角落点数:棋盘图中横向、纵向存在的角点数目,如下棋盘标定图中,横向为8,纵向为6,可认为是(方块数-1).
结果图宽度、高度:去畸变后的图片的宽度和高度,会自动生成,可以自行略微修改。
水平、竖直偏移:将图片在水平、竖直方向平移多少像素点。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号