NURBS__IFEM(1)
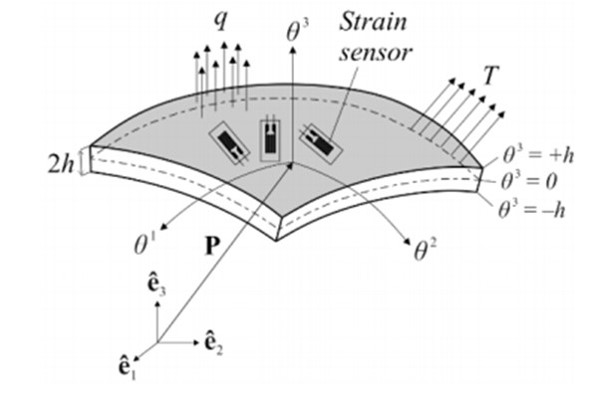
壳单元的应变推导
单元内任意一点的位移定义
单元的应变是由各单元结点位移在局部坐标自由度上的偏导,因此需要先表达壳体内任意一点的位移
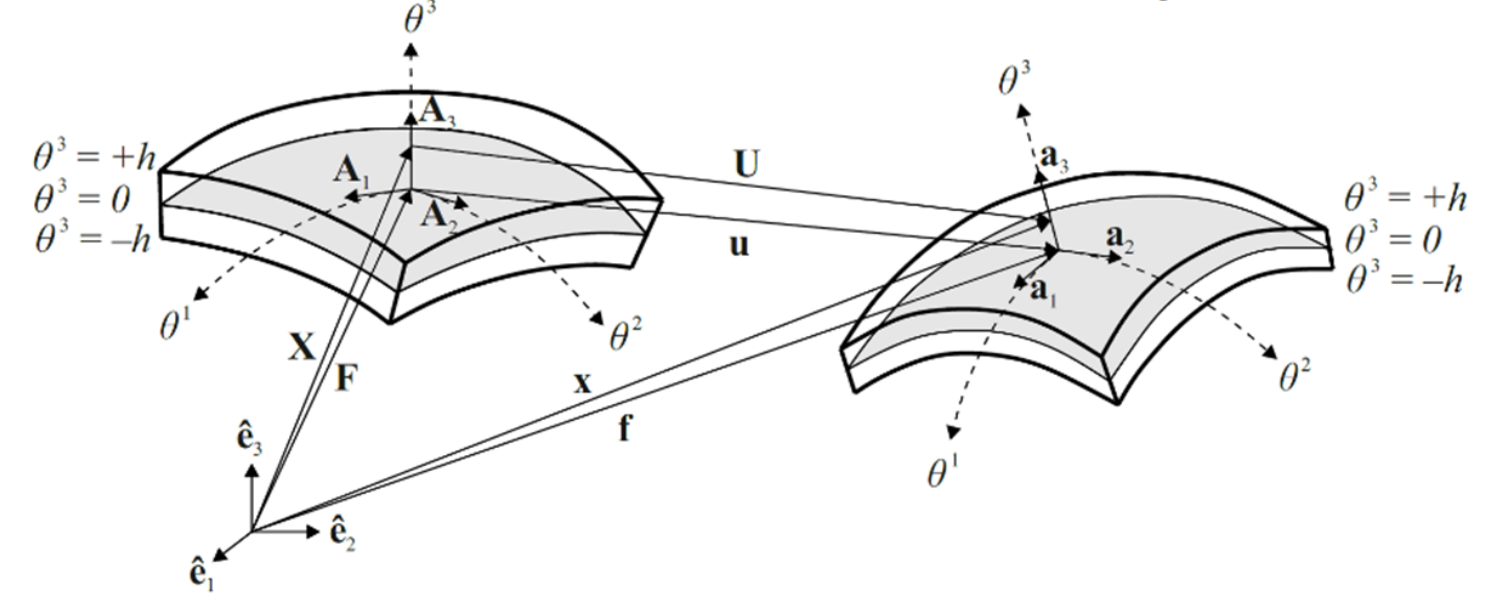
其中,\(f、F\)向量表示变形前后中面任意一点的位置,\(A_{\alpha}=F_{,\alpha}(\alpha=1,2)\),\(A_3=\frac{A_1\times A_2}{||A_1\times A_2||}\)
任意一点的位置可以由\(\theta_1,\theta_2,\theta_3\)表示,\(A_3\)向量可以由\(A_1和A_2\)的叉乘表示。
值得注意的是:
- \(A_{\alpha}\)是\(F_{\alpha}\)在等参坐标系坐标轴对应的偏导数;
- \(a_3=A_3+ \theta \times A_3\)
- 壳内任意一点的位移向量可以表示为:\(U=x-X=f-F+ \theta^3( \theta \times A_3)\)
显然\(f-F\)表示结点的直线位移,\(\theta^3( \theta \times A_3)\)表示转角位移。那么问题来了,这个\(a_3\)向量为什么这么表示?现已知旋转向量:
\(\chi_1\)和\(\chi_2\)表示对应\(A_\alpha\)的转动系数,注意是系数!不是角度!! 不是角度!!!不是角度!!!!
假设\(a\)坐标系绕着\(A_2\)转动了\(k\)度,对应的转动系数应该是\(sin(k)\),是因为\(k\)特别小,所以才无穷小成为一个度数,在几何意义上,我们其实是不能把他理解成一个度数来理解这个数学逻辑的。(类似于\(\displaystyle \lim_{x \to 0} sinx=x\))
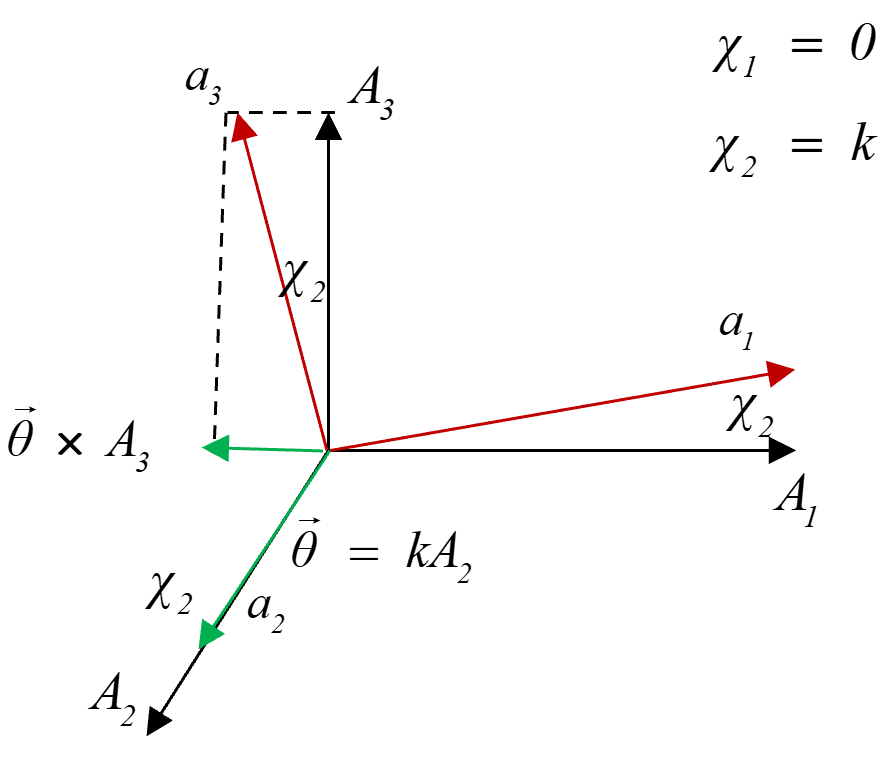
其实通过右图这个简单的例子,我们可以看到,在此情况下,变形后,厚度方向的向量\(a_3\)的表示确实如此。当\(\chi_1\)开始有值的时候,\(\theta \times A_3\)会在\(xy\)平面内顺时针或者逆时针转动。
于是壳体内任意一点位移向量经过化解又有:
至此我们推导到出了壳体上,任意一点的位移的向量表示方法。
曲面任意一点的内应变表示
我们得到位移向量之后,根据应变的定义,只需要对等参数坐标系3个直线自由度方向求偏导,既\(\theta _1 ,\theta_2,\theta_3\),可以得到对应的应变表示。令,\((\bullet)_{,\alpha}= \frac{\partial (\bullet)}{\partial\theta^{\alpha}}\)
现在通过对\(U\)在\(\theta_1,\theta_2,\theta_3\)上求偏导获得应变表达,整体还是根据链式规则求偏导,需要注意的是:
- 这里向量的之间的乘积方式,是点成还是叉乘要搞清楚。
- 我们一定要注意U向量在图上是哪段,要注意,我们做最小二乘的时候,是在哪个坐标系下面进行的。
- 求完偏导之后我们到的是一个应变向量,需要通过一组基函数获得在\(\theta_1,\theta_2,\theta_3\)上的分向量。(ps: 我在协变基这边理解了很长时间,之前以为是坐标变化,自己把自己推翻了。现在我觉得这个协变基的作用就是这样的。)
- 待续!后面我加个例题,加深协变和逆变的理解
我们需要在变形前局部坐标系\((\theta_1,\theta_2,\theta_3)\)下的表达应变,显然利用\(X_{,(\theta_1,\theta_2,\theta_3)}\)可以求出协基。
平面内的理论应力表达可以得到:
在厚度方向的剪切应变,即\(\gamma_{13},\gamma_{23}\)可以表示为:
把这个式子展开,我们可以看到\(\gamma_{\alpha,3}\)为0
至此我们得到了壳体上任意一点的理论应变表达。就那\(xx,yy,xy\)三个,即:\(xy\)平面内的薄膜应变、弯曲应变和横向剪切。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号