网络流初步
以下内容均以此题为例讲解,以下贴的代码,都不能过,long long这些东西自己改,全部用int感觉美观一些
网络流
那么做这道模板题之前还是先了解一下网络流到底是个什么吧(因为我也是个初学者,如果有讲错或者不清楚的地方可以评论或者在其他dalao的题解或是博客中学习)
对于一个网络 \(G=(V,E)\) 是一个有向图,每一条边有一个边圈 \(c(x,y)\) 表示这条边的容量,你可以把它想象成一个下水道系统(???),每一条边都是一个管道,每个管道有自己允许流通的水的最大值。对于两个特殊节点, \(S\) 和 \(T\) (\(S\) ≠ \(T\)),如果有 \(S\in G\) 且 \(T\in G\),称\(S\)为源点, \(T\) 为汇点,所有水从 \(S\) 流向 \(T\)
形如以下这个图:
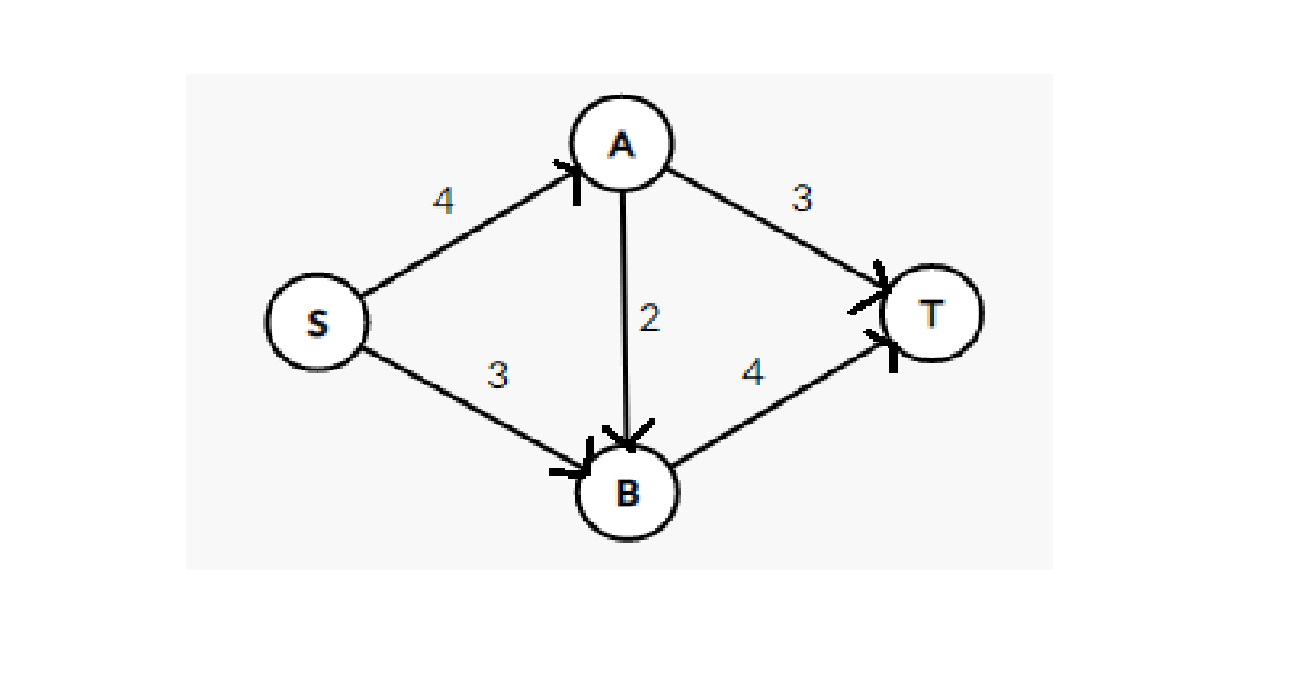
那么 \(S->A->B->T\) 就是该网络的一个流,这个流的流量为2(该路径上的最小的容量)
那么对于这个流量,应该如何定义呢?我们引入一个流函数(摘自李煜东的《算法进阶》)
\(f(x,y)\)为定义在节点二元组(\(x\)∈\(V\),\(y\)∈\(V\))上的实数函数,满足:
- \(f(x,y)\) ≤ \(c(x,y)\)
- \(f(x,y)\) = \(-f(y,x)\)
- \(\forall\) \(x\)≠\(S\),\(x≠T\), \(\sum_{(u,x)∈E }f(u,x)=\sum_{(x,v)∈E }f(x,v)\)
\(f\)称为该网络的流函数,对于\((x,y)\)∈\(E\),\(f(x,y)\)为边的流量,\(c(x,y)-f(x,y)\)为该边的剩余容量
这三条性质分别为容量限制,斜对称和流量守恒。其中流量守恒告诉我们只有源点和汇点才会存储流,其流入总量等于流出总量
最大流
对于一个网络,有很多的流函数\(f\)都是合法的,那么使得整个网络的\(\sum_{(S,v)∈E }f(S,v)\)最大的流函数称为该网络的最大流,此时的流量为该网络的最大流量
那么求这个最大流,我会讲解 Edmonds-Karp增广路算法 和 Dinic算法,当然还有ISAP和HLLF等更加高效的算法,因为蒟蒻不太会,这里就不介绍,如果学会了会更新的
Edmonds-Karp增广路算法
时间复杂度:\(O(nm^2)\)
先介绍一下增广路是个什么:对于 \(S\) 到 \(T\) 的一条路径,如果路径上各边的剩余容量大于0,则这一条路径就是一条增广路
那么仔细一想,如果当前网络中还存在着那么一条增广路,那么说明我的流量还可以更大(见增广路的定义和剩余容量的定义),那么EK算法的核心思想就是不断地寻找增广路,直到无法找出最广路之后,说明找出了网络中的最大流
那么注意在实现寻找增广路时,我们可以用广搜实现,这样就可以保证找到每一条增广路
那么在找到增广路时,我们也应该去考虑反向边,用来反悔,也就是还原。在找到一条增广路时,路径上的容量应该减去这条增广路的流量,那么在处理这个东西之后就会影响到其它增广路,这个时候建反向边就可以起到一个反悔的作用
那么整个的模拟过程如下(从左往右看):

那么我们就可以写出来第一份程序了
#include<bits/stdc++.h>
using namespace std;
const int MAXN=50000;
const int INF=2147483649; //记得初始值写大点
int n,m,s,t;
struct node{
int net,to,w;
}e[MAXN];
int head[MAXN],tot=1;//注意这里是1,其实-1也行,看个人爱好
void add(int x,int y,int z){
e[++tot].net=head[x];
e[tot].to=y;
e[tot].w=z;
head[x]=tot;
}
//领接表存边
int ans;
int bian[MAXN],minn[MAXN]; //bian是用来记录路径的,minn表示增广路上各边的最小剩余容量
bool v[MAXN];
bool bfs(){
for(register int i=1;i<=n;i++) v[i]=false;
queue<int>q;
q.push(s);
v[s]=true;
minn[s]=INF;
while(!q.empty()){
int x=q.front();
q.pop();
for(register int i=head[x];i;i=e[i].net){
if(e[i].w!=0){ //不为0才走
int y=e[i].to,z=e[i].w;
if(v[y]==true) continue; //增广路走过就不管了
minn[y]=min(minn[x],z);
bian[y]=i;
v[y]=true;
q.push(y);
if(y==t) return true; //可以到达汇点
}
}
}
return false;
}
void update(){
int x=t;
while(x!=s){
int i=bian[x];
e[i].w-=minn[t]; //正向边-
e[i^1].w+=minn[t]; //反向边+
x=e[i^1].to;
}
//这个异或1其实非常的秒
//因为之前在存储边的时候,是直接正向反向一起存
//所有反向边=正向边+1
//一个偶数异或1=偶数+1
//一个奇数异或1=奇数-1
ans+=minn[t]; //更新答案
}
int main(){
scanf("%d%d%d%d",&n,&m,&s,&t);
for(register int i=1;i<=m;i++){
int x,y,z;
scanf("%d%d%d",&x,&y,&z);
add(x,y,z); //有向边存储
add(y,x,0); //先存一个边权为0的反向边,有用
}
while(bfs()==true) update(); //不断更新增广路
printf("%d",ans); //答案
return 0;
}
出题人毒瘤地卡掉了EK,但其实EK是能过的(想不到吧嘿嘿嘿),TLE的那两个点其实是因为有太多的重边,那么其实对于重边,我们只需要将重边累加,也可以AC的(@那一条变阻器,他用vector这么过的),其实在上面的程序的基础上改不了多少东西,就两行
#include <bits/stdc++.h>
using namespace std;
int n,m,s,t,u,v;
int w,ans,dis[520010];
int tot=1,vis[520010],pre[520010],head[520010],flag[2510][2510];
struct node {
int to,net;
int val;
} e[520010];
inline void add(int u,int v,int w) {
e[++tot].to=v;
e[tot].val=w;
e[tot].net=head[u];
head[u]=tot;
e[++tot].to=u;
e[tot].val=0;
e[tot].net=head[v];
head[v]=tot;
}
inline int bfs() {
for(register int i=1;i<=n;i++) vis[i]=0;
queue<int> q;
q.push(s);
vis[s]=1;
dis[s]=2005020600;
while(!q.empty()) {
int x=q.front();
q.pop();
for(register int i=head[x];i;i=e[i].net) {
if(e[i].val==0) continue;
int v=e[i].to;
if(vis[v]==1) continue;
dis[v]=min(dis[x],e[i].val);
pre[v]=i;
q.push(v);
vis[v]=1;
if(v==t) return 1;
}
}
return 0;
}
inline void update() {
int x=t;
while(x!=s) {
int v=pre[x];
e[v].val-=dis[t];
e[v^1].val+=dis[t];
x=e[v^1].to;
}
ans+=dis[t];
}
int main() {
scanf("%d%d%d%d",&n,&m,&s,&t);
for(register int i=1;i<=m;i++) {
scanf("%d%d%d",&u,&v,&w);
if(flag[u][v]==0) {
add(u,v,w);
flag[u][v]=tot; //用一个数组记录这一条边
}
else {
e[flag[u][v]-1].val+=w; //累加重边
}
}
while(bfs()!=0) {
update();
}
printf("%d",ans);
return 0;
}
Dinic算法
时间复杂度: \(O(n^2m)\)
相对于之前EK算法来说,在稀疏图中的表现其实是差不多的,但是在稠密图中就快很多了,别妄想这总用第二个程序过,还是要学学一些更加优秀的算法(所以我为什么还不学ISAP之类的)
讲Dinic之前,我们不妨再引入一个东西:残量网络。任意时刻,在网络中所有节点以及剩余容量大于0的边构成的子图叫做残量网络。在EK算法中,每轮BFS会遍历整个残量网络,但只更新一条增广路,这就浪费了很多时间,就需要用Dinic算法了
我们设一个 \(d[x]\) 表示 \(x\) 的层次,如果满足\(d[y]=d[x]+1\) 的边\((x,y)\),则它是一个分层图,是一个有向无环图
为什么用Dinic会更优呢,我们先用BFS求出每一个节点的深度,在分层图上DFS只去寻找到下一层的边,每一次找出多条增广路,这样就会快很多,但是BFS会跑很多遍,ISAP只用跑一遍,但是我不会(菜)
这其中还会涉及一个当前弧优化,听着很nb是吧,就是在更新第\(i\)条边时,前面\(i-1\)条边到汇点的流已经流蛮并且没有路可以走了,可以不去更新,我们记录一下就可以了,不需要重新去跑之前的边
至于实现的方法,直接在代码中讲解好了:
#include<bits/stdc++.h>
using namespace std;
const int INF=2147483;
const int MAXN=50000;
int n,m,s,t;
struct node{
int net,to;
int w;
}e[MAXN];
int head[MAXN],tot;
void add(int x,int y,int z){
e[++tot].net=head[x];
e[tot].to=y;
e[tot].w=z;
head[x]=tot;
}
int de[MAXN]; //存储每一个点的层次
int now[MAXN];//这个now可以暂时看为head的一个副本,所有值都一样
bool bfs(){
queue<int>q;
for(register int i=1;i<=n;i++) de[i]=INF;
q.push(s);
de[s]=0;
now[s]=head[s]; //充分发挥一个作为副本的作用
while(!q.empty()){
int x=q.front();
q.pop();
for(register int i=head[x];i;i=e[i].net){
int y=e[i].to,z=e[i].w;
if(z!=0&&de[y]==INF){ //如果当前边可以走且还没找过
q.push(y);
now[y]=head[y];
de[y]=de[x]+1; //更新层次
if(y==t) return true;
}
}
}
return false;
//其实和EK的BFS差不了多少的
}
int dfs(int x,int liu){
if(x==t) return liu; //直接返回
int k,ans=0; //k是当前最小的剩余容量,
for(register int i=now[x];i&&liu;i=e[i].net){
now[x]=i;//当前弧优化
int y=e[i].to;
if(e[i].w!=0&&(de[y]==de[x]+1)){
k=dfs(y,min(liu,e[i].w)); //比较出一条更小的
if(!k) de[y]=INF; //剪枝,去掉增广后的点
e[i].w-=k;
e[i^1].w+=k; //正向反向更新
ans+=k; //流出去的流量和
liu-=k; //剩余流量减少
}
}
return ans;
}
int main(){
scanf("%d%d%d%d",&m,&n,&s,&t);
tot=1;
for(register int i=1;i<=m;i++){
int x,y,z;
scanf("%d%d%d",&x,&y,&z);
add(x,y,z);
add(y,x,0);
}
int maxx=0; //最大流
while(bfs()) maxx+=dfs(s,INF);//记录答案
printf("%d",maxx);
return 0;
}
感谢一下@那一条变阻器和@取什么名字 两个大佬的指点,当然还有其他题解(因为我最开始自己也不会编啊~~~)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号