OUC中国海洋大学2023计算机图形学期末复习笔记
\(\alpha\)
重点导航
第一章 变换
第二章 光栅化
第三章 着色
第四章 几何
第五章 光线追踪
数学基础
点乘的应用
- 判断两向量方向有多近
- 求一个向量在另一个向量上的投影
- 分解一个向量
- 判断两向量是”同向“还是”逆向“
叉乘的应用
- 判断左右
- 判断内外
仿射变换
线性变化
这类变化,首先找到x和y怎么变得,得到两个线性表达式。然后将这个表达式切换成矩阵表达就可以了。关键是这四个变换矩阵。
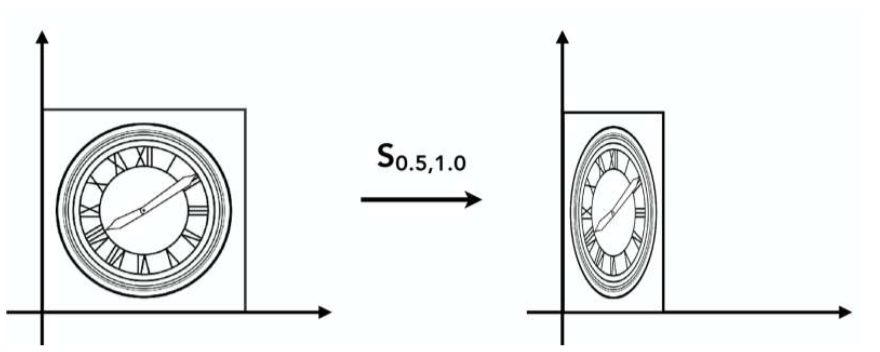
缩放
我们发现 x = ax, b = by。简单
这个三维也很简单,不说了
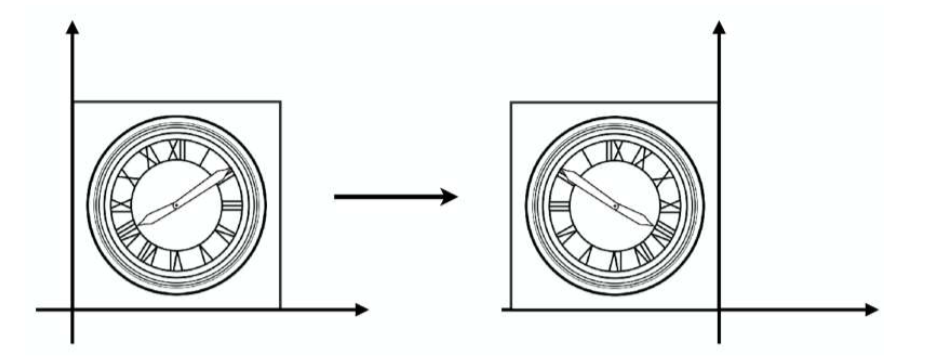
对称
y不变,x相反。这是y对称,x对称刚好反着来
拓展到三维。关于哪个平面对称(比如ZoY),那么平面的两个坐标轴(yz)不变,剩下的一个坐标轴(X)相反即可
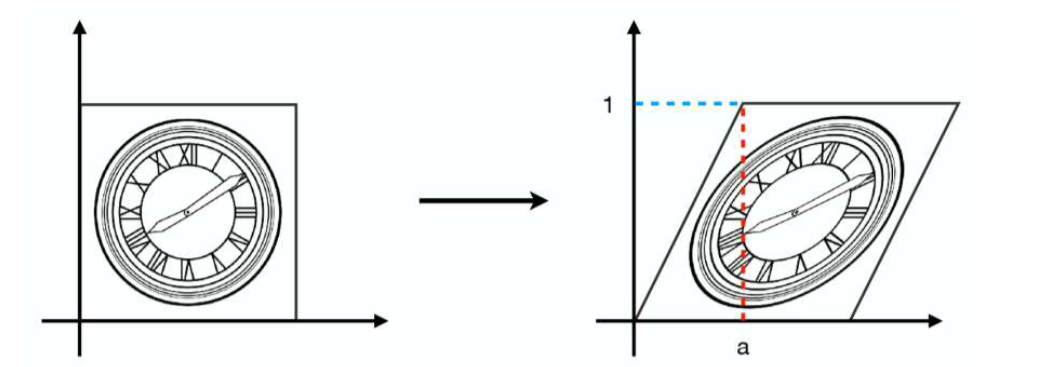
错切
我们取特殊点(0,1),错切变换后变成了(a,1)。取(0,0.5),得到(0.5a,0.5)。所以横坐标变成了(原来 + y*a), 纵坐标不变
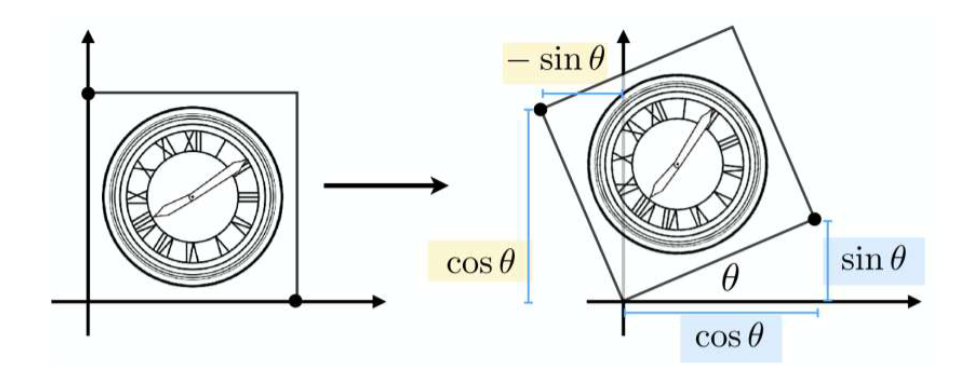
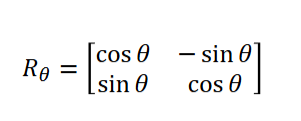
旋转
二维
(1,0)变成了(cosα,sinα),
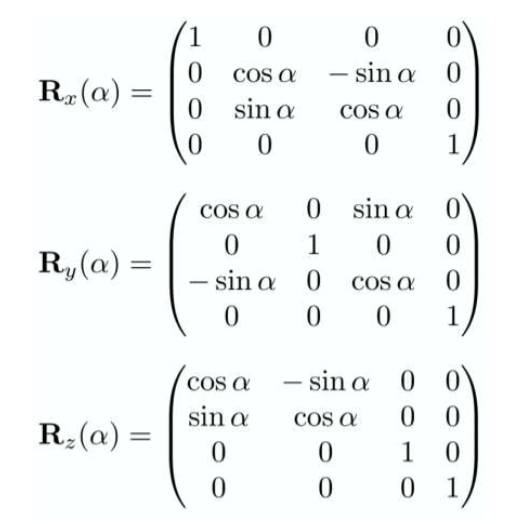
三维
绕哪个轴旋转,哪个轴不变(横、纵),其余注意:关于Y轴旋转有所不同,取相反(-α)
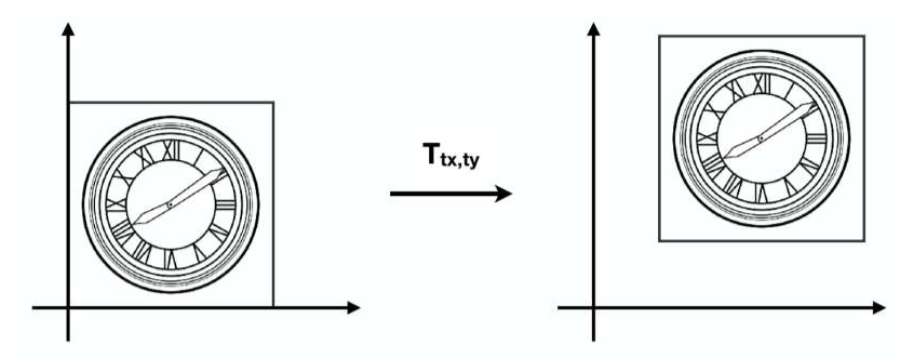
平移
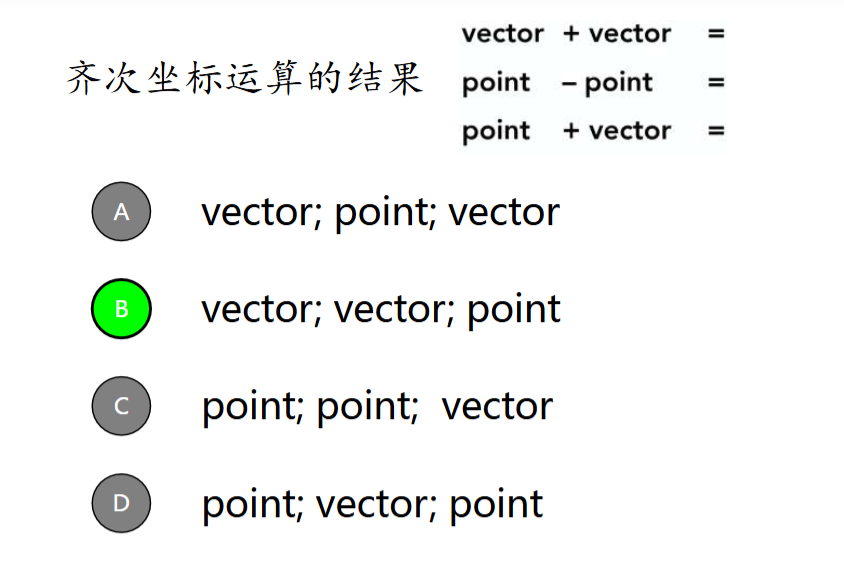
齐次坐标
第三维是1代表点(x,y,1),第三位是0代表向量(x,y,0)
点 - 点 = 向量
向量 + 向量 = 向量
点 + 向量 = 点
点 + 点 = 点
平移变换
此时x = x+ tx, y = y+ty
利用齐次坐标,得到以下矩阵
逆变换
旋转矩阵的逆变换
组合变换
顺序很重要,从右往左

例题
绕任意点C的旋转
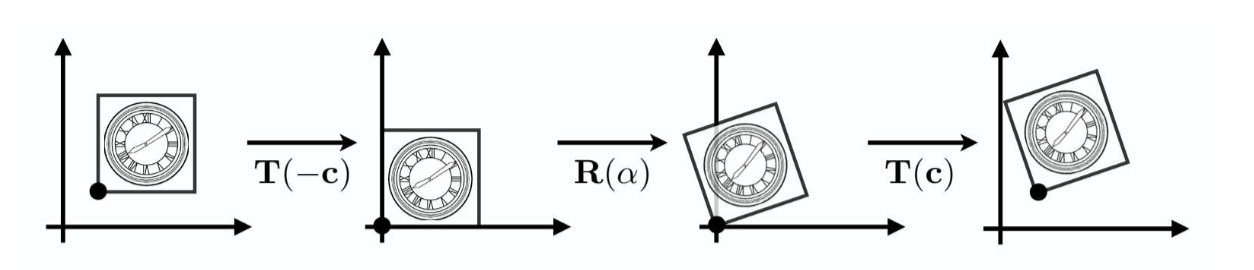
我们先平移到原点,然后进行旋转,最后进行平移的逆运算
绕任意轴旋转
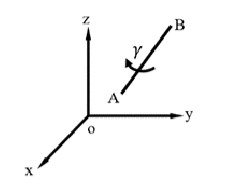
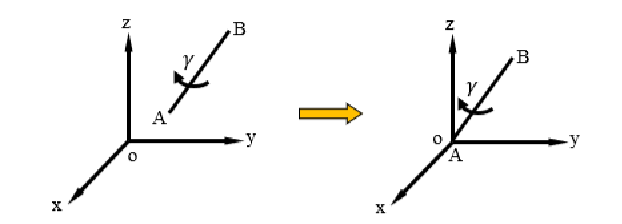
设以三维空间中任意一条线段\(AB\) 为旋转轴,点\(P\)绕\(AB\)逆时针旋转$ γ$ 角,求旋转矩阵\(R_{AB}\)
- 平移\(AB\) 到坐标原点
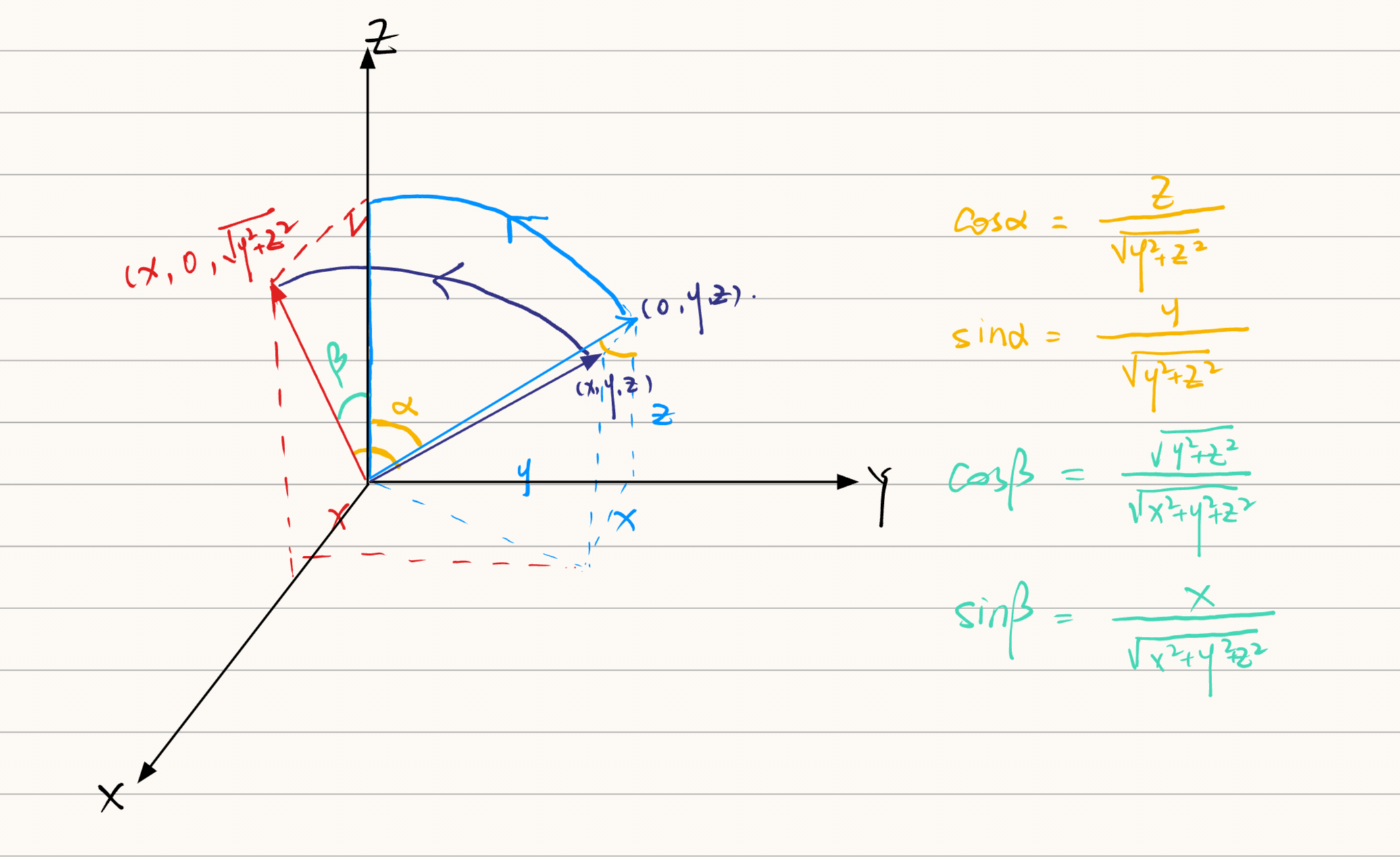
- 绕 \(X\) 轴旋转 \(\alpha\) 到 \(ZoX\) 平面上
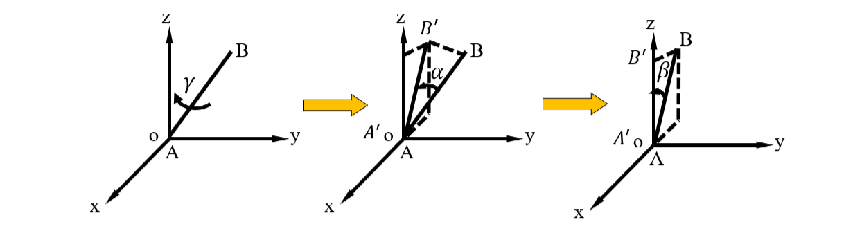
这个 α 怎么求呢? 注意我们这里绕 X 轴旋转,所以在 YoZ 平面上观察。AB绕X轴旋转,投影在YoZ平面上的轨迹是一个圆。所以我们将AB投影到YoZ平面上,当投影的向量和 Z 轴重合的时候, AB就旋转到了 ZoX 平面。
即 cosα = \(\frac{z}{\sqrt{y^2+z^2}}\)
- 绕 \(Y\) 轴旋转 \(\beta\) 到 \(Z\) 轴上
绕X轴旋转,那么X不会变,所以投影到ZoX平面上的新坐标(x’, y', z')中的x' = x。然后 y‘ = 0,z = \(\sqrt{y^2 + z^2}\),即z是原向量在YoZ平面投影的模长。
最终我们得到 cosβ = ...
- 绕 \(Z\) 轴旋转 $\gamma $ 角
-
执行绕 \(Y\) 轴旋转的逆变换,回到 \(ZoX\) 平面上的状态(\(R_y^{-1}\))
-
执行绕 \(X\) 轴旋转的逆变换,回到 \(A\) 在原点的状态(\(R_x^{-1}\))
-
执行平移的逆变换(略)
最后得到总方程组
考试的时候当然用上面方法写过程,罗德里格旋转公式算答案
其中 v是给的任意向量,k是旋转轴的单位向量
光栅化成像
MVP变换
模型变换
目的:选景、安排好被拍人的位置
包含上面提到的仿射变换
视图变换
目的:找好相机的角度。如果模型和相机的位置都发生变化,如何保证照片不发生变化
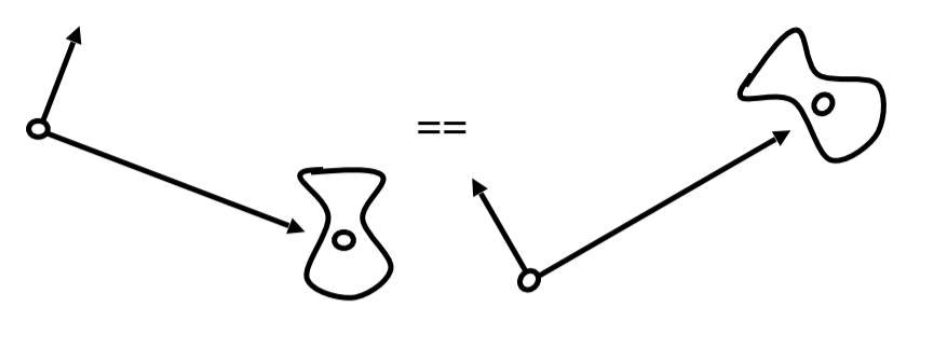
在这里我们做的是 摆正 这个操作
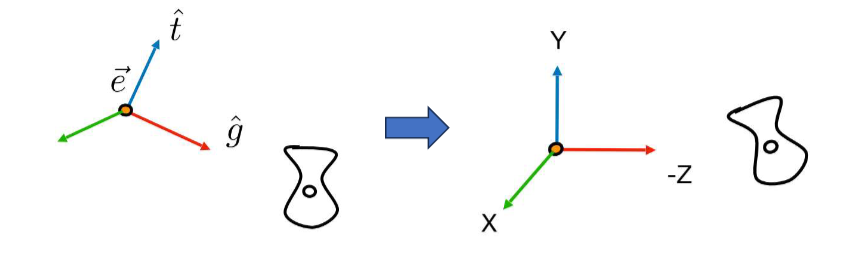
- 平移到原点。这里平移距离都是 \(-\vec{e}\) 。
- 然后旋转三次
投影变换
目的:拍照
将3D图像变成二维的
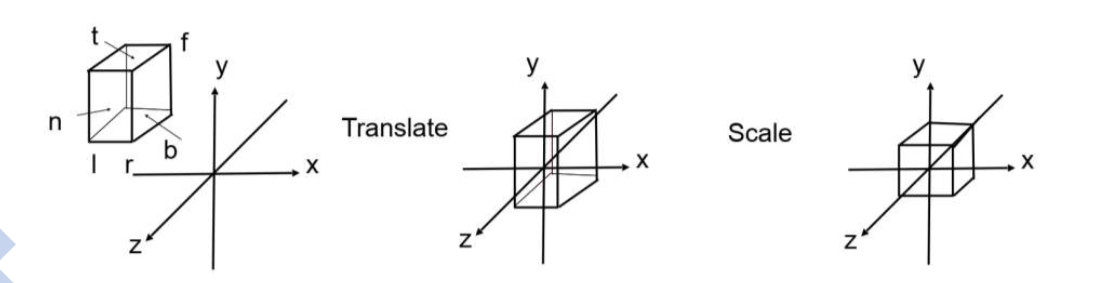
正交投影
将相机放在原点,观察方向取 -z,向上方向取Y。
我们舍弃掉Z坐标,将结果平移和缩放到 \([-1, 1]^2\)的矩形内
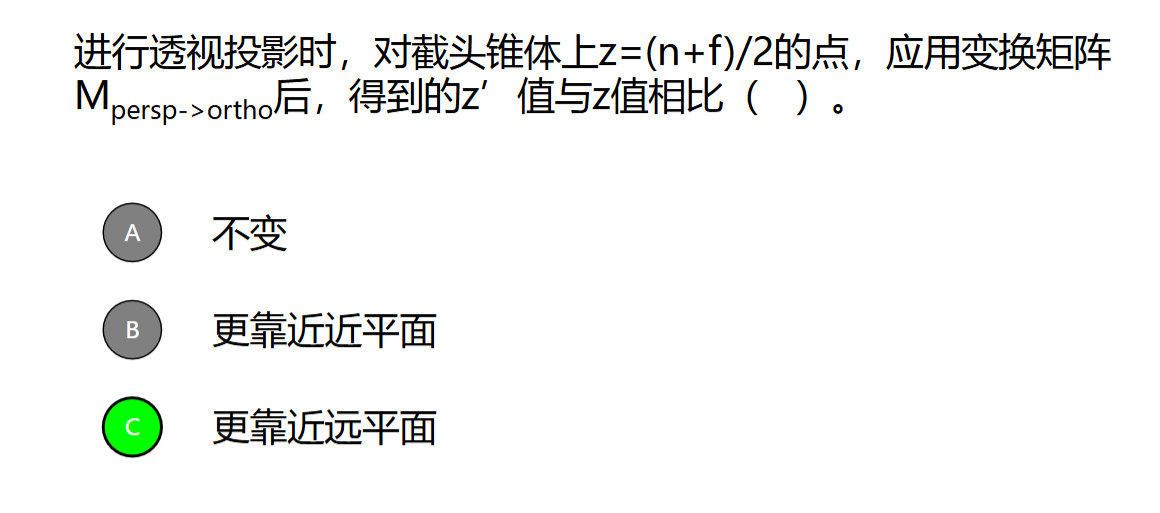
透视投影
有近大远小的效果。平行线不再平行,其延长线相交到一点
我们做的好比把一个截头锥体挤压成一个立方体,然后做正交投影
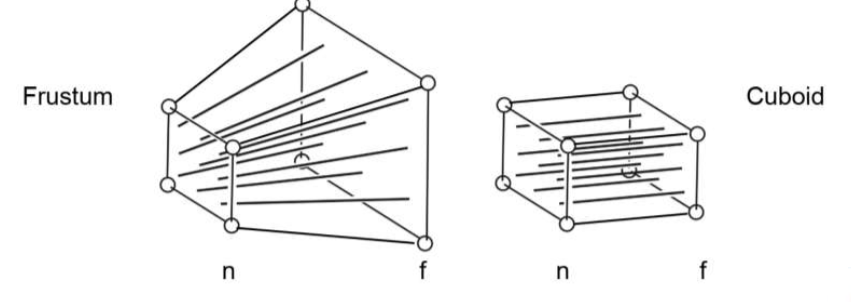
这个矩阵应该不用记
屏幕空间
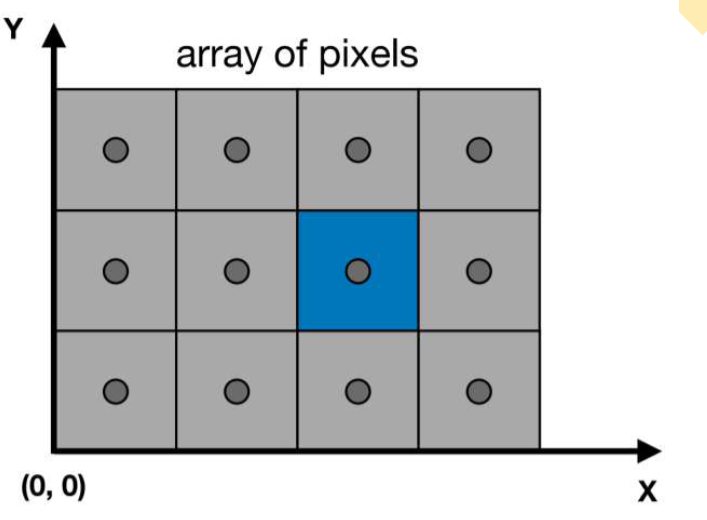
像素索引、像素中心
像素索引位于左下角,由(0,0)到(width-1,height-1)
像素中心相对于索引来说是:(x+0.5, y+0.5)
屏幕覆盖区域
屏幕覆盖的区域由(0,0)到(width,height)
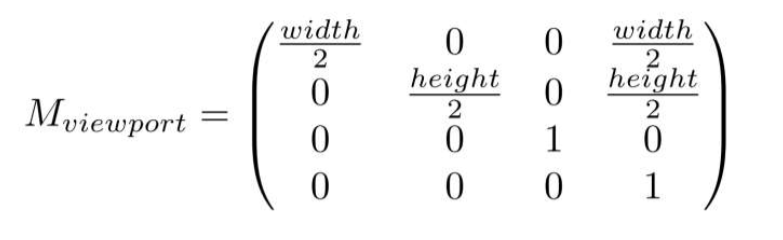
视口变换
将 $[-1, 1]\times [-1,1] $ 切换到屏幕空间$ [0, width] \times [0, height]$. 所以和 Z 坐标无关
多边形网格
三角网格性质
-
三角网格一定是平面的
-
内外定义清晰
-
对内部的任一点方便做插值
采样——光栅化一个三角形
采样的定义
光栅化的最简单的方法:采样
给定一个连续的函数,在某点计算函数的值(离散化一个函数的过程)
举例
对时间(一维)、面积(二维)、方向(二维)、体积(三维)采样
二维采样
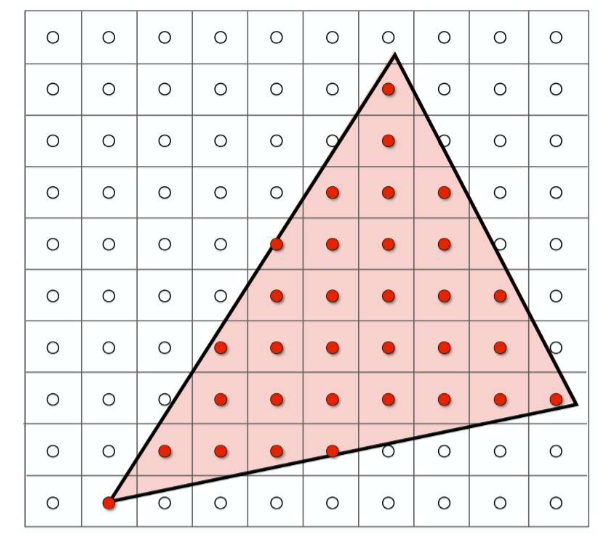
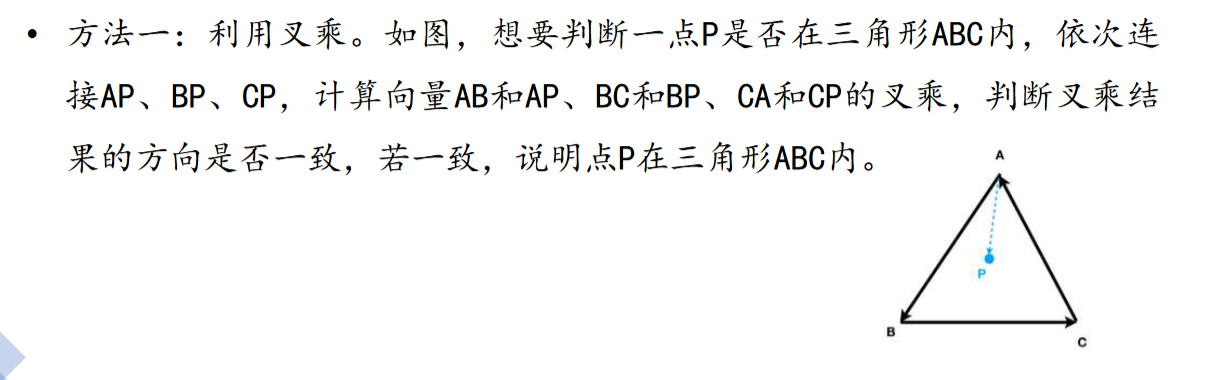
点是否在三角形内
方法一:利用叉乘
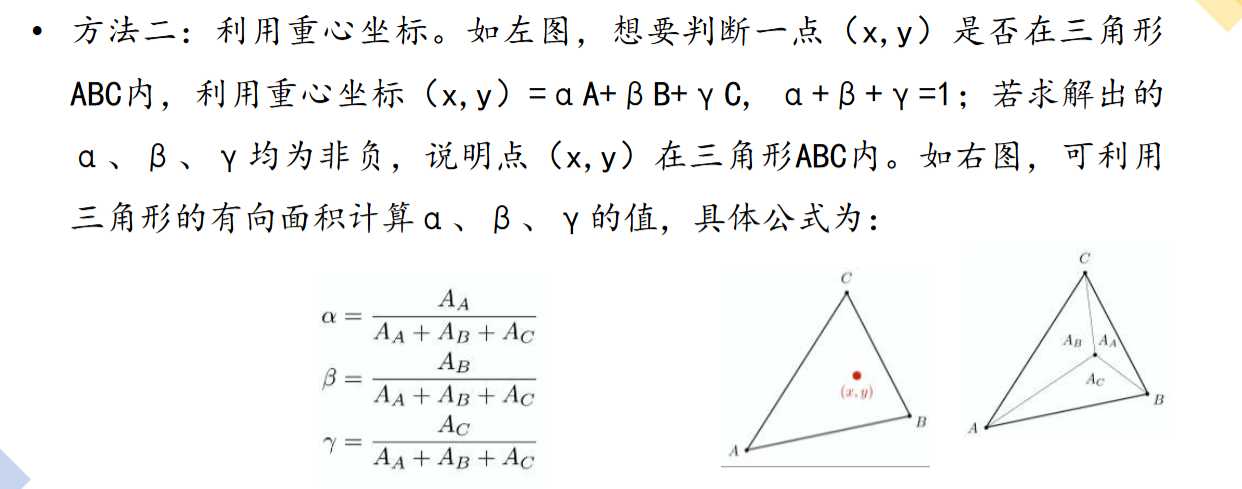
方法二:利用重心坐标
走样
常见走样和成因
- 锯齿:空间采样
- 摩尔纹:欠采样的图像
- 车轮错觉:时间采样
如何改善走样问题
信号变换的太快(高频),而采样频率太慢。所以也可以提高采样率来解决走样问题
反走样
原理
在采样前先过滤掉高频信息
方法
光栅化三角形反走样的边界,像素值为中间值。
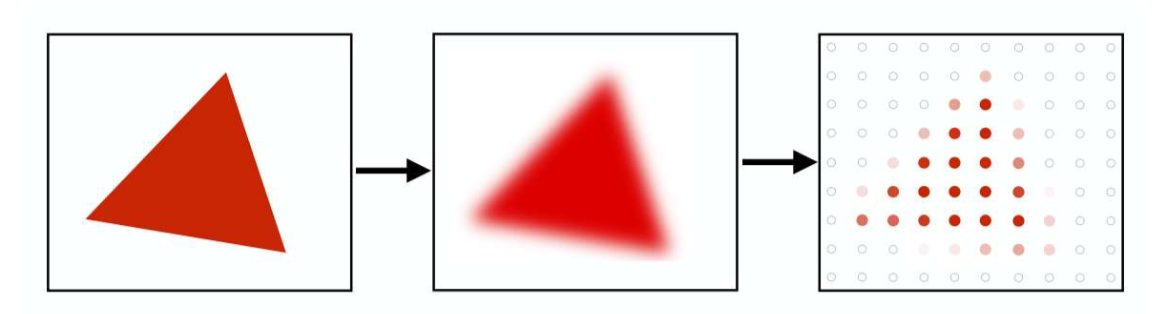
平均像素值通过三角形覆盖像素面积来计算
超级采样 vs 点采样
通过在一个像素中多次采样,计算他们的平均值作为平均像素值
点采样中一个像素中一个采样点
超级采样中一个像素 N*N个采样点,计算每个像素中N*N个采样点的平均值
遮挡/可见性——光栅化多个三角形
画家算法——由远及近
先画远处的物体,再画近处的物体
- 对场景中的多边形按深度进行排序(O(nlogn))
- 按照深度从深到浅绘图
- 浅的覆盖到深的,需要再帧缓冲器中重写
Z-Buffer算法
思想
对每个采样点(像素)记录当前的最小Z值。
这里的Z是正的,力相机越近,Z越小
伪代码
我们需要一个帧缓冲器记录颜色值;和一个深度缓冲器记录深度值
for(each triangle T)
for(each smaple (x,y,z) in T)
if(z < zbuffer[x,y])
framebuffer[x,y] = rgb;
zbuffer[x,y] = z;
else
;
- 遍历每个多边形(三角形)
- 遍历每个多边形的每个像素点
- 如果这点比屏幕上该点更浅(z比深度缓冲器更小)
- 更新颜色(帧缓冲器)和深度
复杂度
n个三角形复杂度为O(n)
问题
- 在线性时间内完成n个三角形的排序?
- 如果以不同顺序光栅化场景中的三角形,对结果是否由影响
着色
Bling-Phong反射模型
组成部分:名称、示意图、视觉效果、公式
着色计算与观察方向
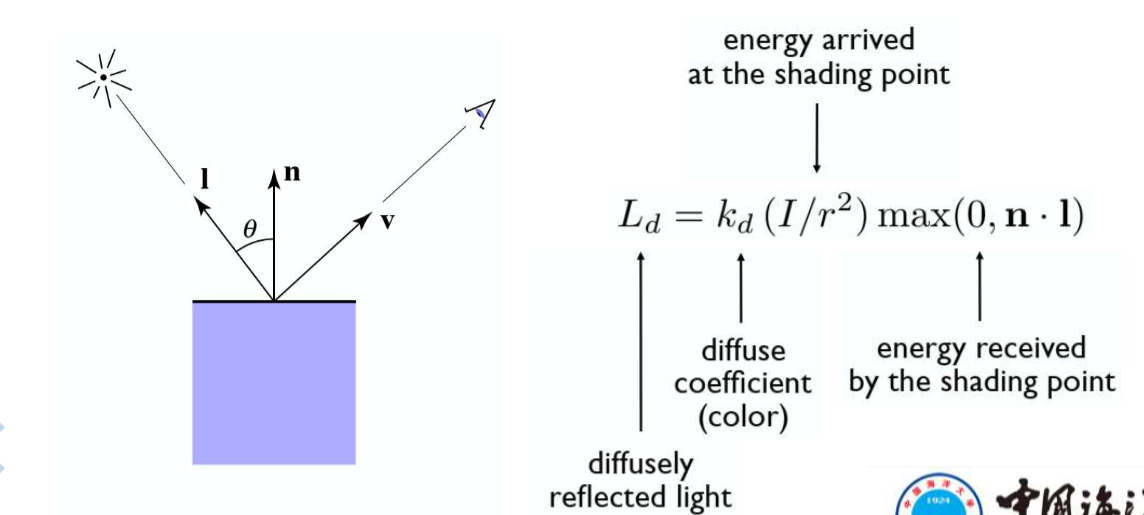
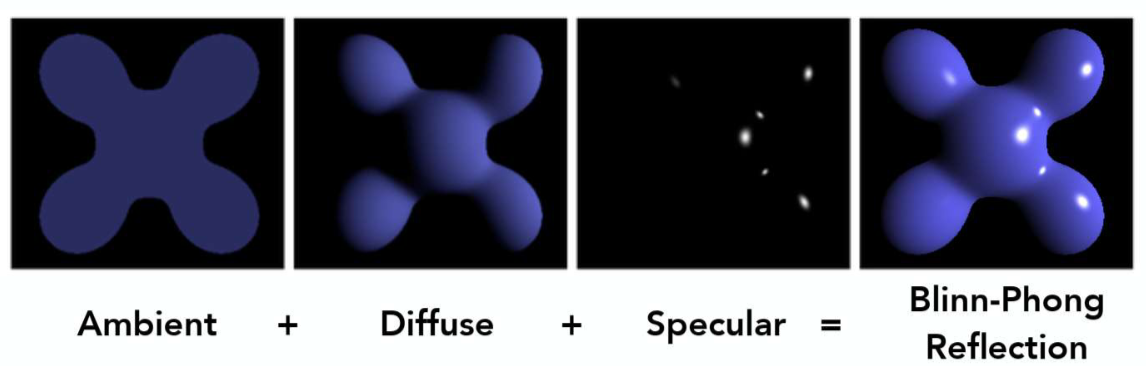 $$L = L_a +L_d + L_s\\= k_aI_a + k_d(\frac{I}{r^2})max(0, \vec{n} \cdot \vec{l})~+~ k_s(\frac{I}{r^2})max(0, \vec{n} \cdot \vec{h})$$
$$L = L_a +L_d + L_s\\= k_aI_a + k_d(\frac{I}{r^2})max(0, \vec{n} \cdot \vec{l})~+~ k_s(\frac{I}{r^2})max(0, \vec{n} \cdot \vec{h})$$
漫反射
光沿各个方向均匀散射
兰伯特余弦定理
描述了有多少光/能量被接收到
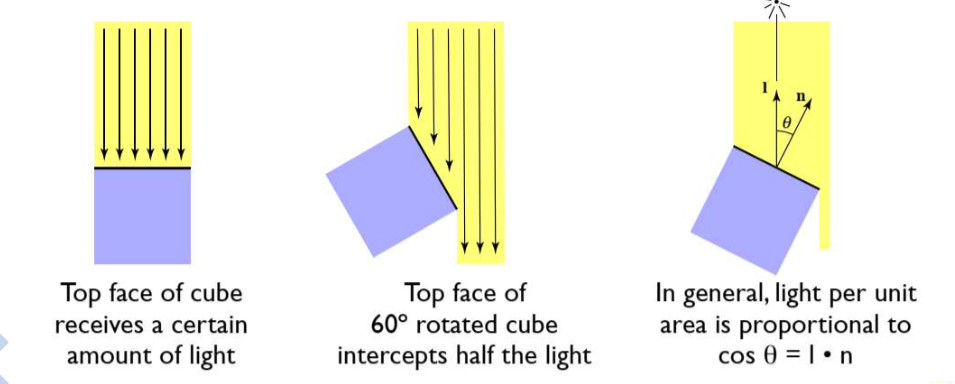
着色与观察方向无关。主要表示物体接收到了多少光。
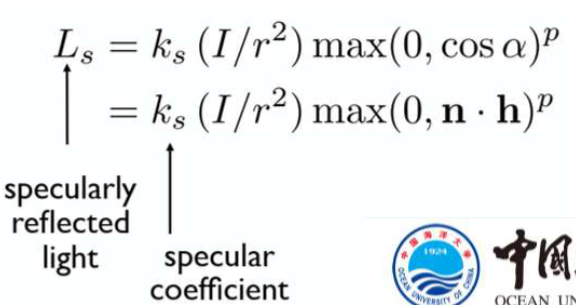
镜面高光
越接近反射方向越明亮
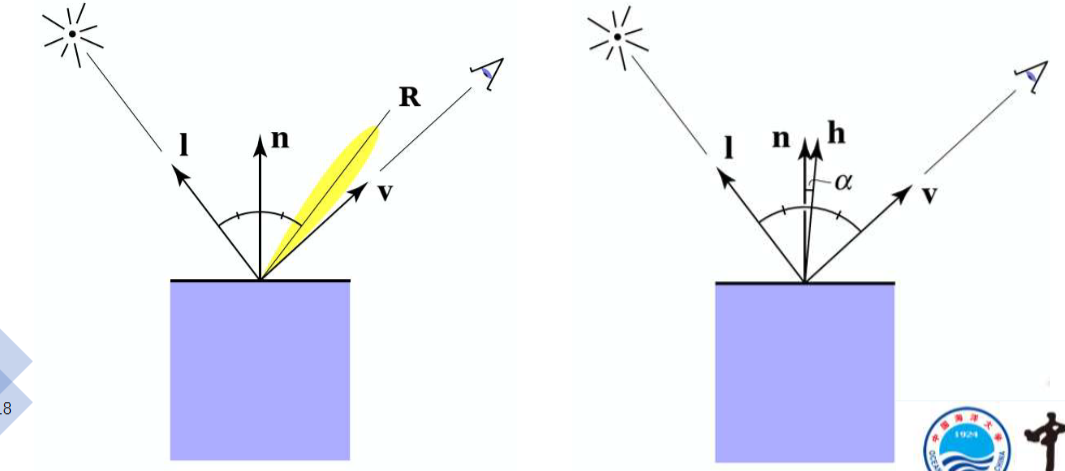
半程向量
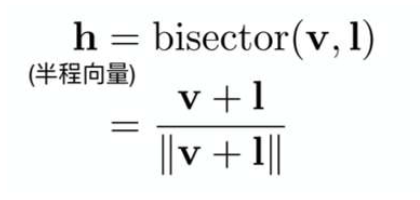
公式
环境光
不取决于任何其他因素
着色频率
面、顶点、像素:名称
法向量计算
面着色(Flat shading)

三角形是平面的,得到一个面的法向量。
不适合光滑的表面
顶点着色(Gouraud shading)
三角形的顶点携带颜色信息
每一个顶点上有一个法向量
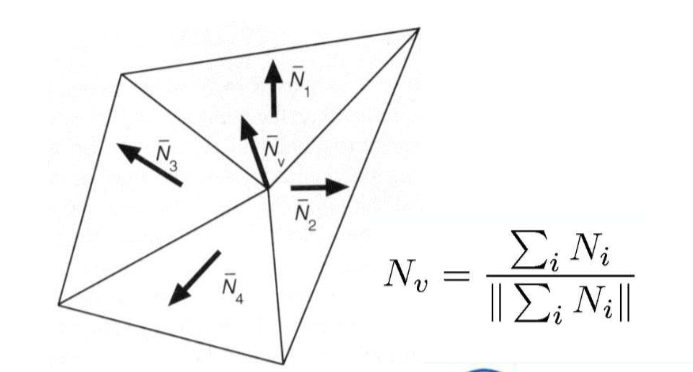
顶点法向量的计算
最好是从想要表示的集合体获取顶点法向量
否则,需要从三角形面获取顶点法向量(利用环绕顶点的面法向量取平均)
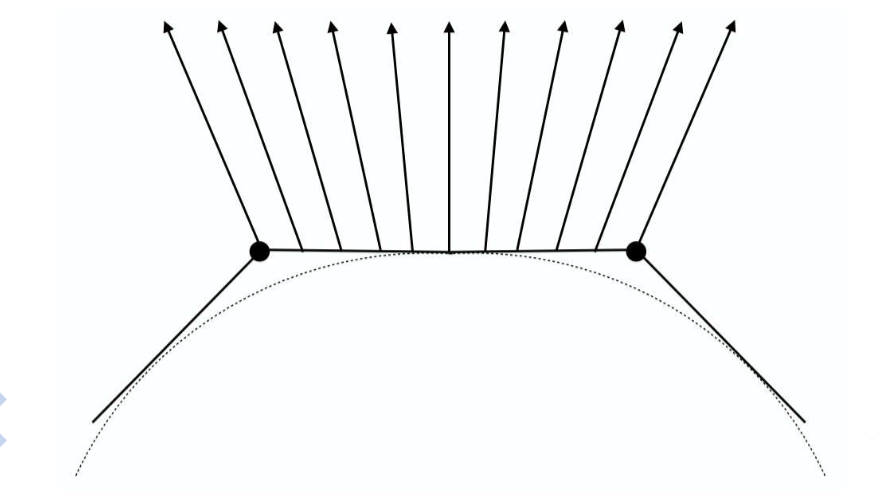
像素着色(Phong shading)
插值得到法向量
在每个像素上计算着色模型
与Blinn-Phong反射模型区别开
像素法向量的计算
利用顶点法向量的中心插值得到(注意插值结果的归一化)
纹理
纹理映射
三维空间中(模型)的表面上的一点总可以对应于二维图像(纹理)上的一点
每一个三角形顶点都分配有一个纹理坐标(u,v),三角形内部任一点的纹理坐标通过插值得到
插值的内容:纹理坐标、颜色、法向量
如何插值:重心坐标
重心坐标
分面积法求重心坐标
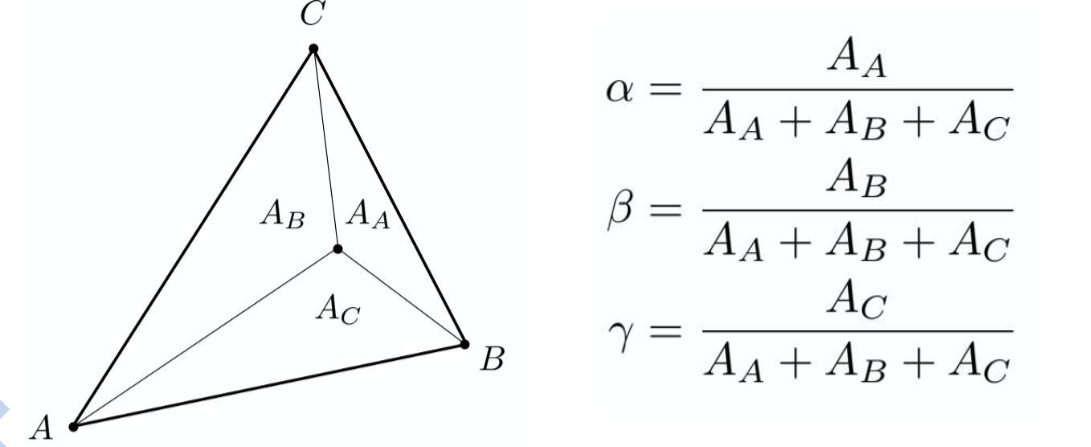
注意到:α + β + γ = 1
计算
代入消去 \(\gamma\):
方程组变为:
写成矩阵形式 \(M \mathbf{x} = \mathbf{b}\):
最后应用克莱姆法则得到 α 和 β
纹理应用的问题
方法、性质、异同、不足
纹理过小问题——纹理分辨率过小
如果纹理很小(分辨率不足),会出现不清晰的问题
纹理上的一个像素称为纹素。这个时候就一个纹理覆盖多个像素
解决方法:纹理放大(进行上采样)
最近邻方法
找最近的一个像素中心
双线性插值
找最近四个像素重心,进行三次线性插值。很简单
Bicubic
找邻近的16个像素中心
纹理过大问题——纹理分辨率过大
纹理很大,也就是说一个像素内对应多个纹理坐标,会产生走样问题(锯齿、摩尔纹)
也就是说纹理频率高,但是屏幕采样率低,导致高频信息丢失。
解决方法1:纹理缩小(对纹理进行下采样)
解决方法2:超采样(提高屏幕的采样率)
解决方法3:范围查询(提前过滤纹理的高频信息)
多级贴图:快速。近似,正方形范围查询
存在问题:
①log2 D 计算出的不是整数,不太平滑:使用三线性插值,两层的结果加权
②正方形受限:使用各向异性过滤或者EWA过滤
纹理应用
环境贴图:只影响着色
环境贴图包括:球形贴图和立方体贴图。
以下两种贴图在影响颜色的同时,纹理存储了高度/法线信息,用于伪造详细的几何形状
凹凸贴图
方法
添加表面细节但不改变任何几何信息(不会增加三角形的数目)
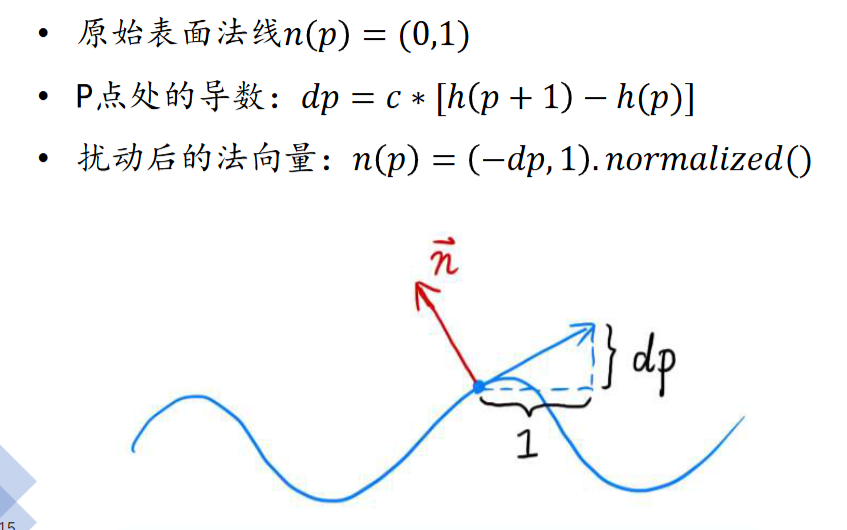
- 在每个像素上扰动表面法线
- 利用纹理定义每个纹素上的“高度偏移”
- 改变法向量的过程:
问题
- 在模型边缘不能很好的模拟凹凸效果
- 阴影效果还是由真实的几何信息计算而出
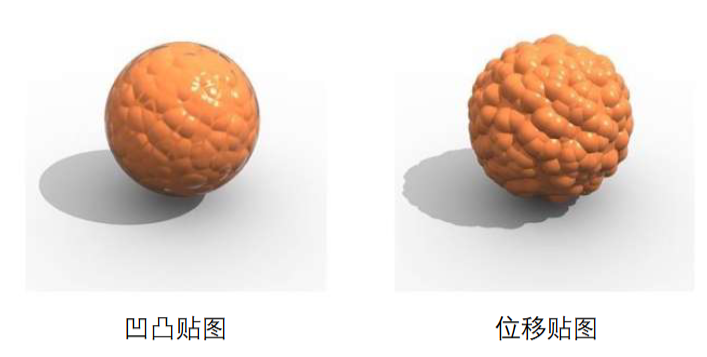
位移贴图
区别相对于位移贴图真正移动了三角形的顶点
问题
- 对三角形数目的要求
- 可以利用动态曲面细分来解决
几何表示
几何的表示形式
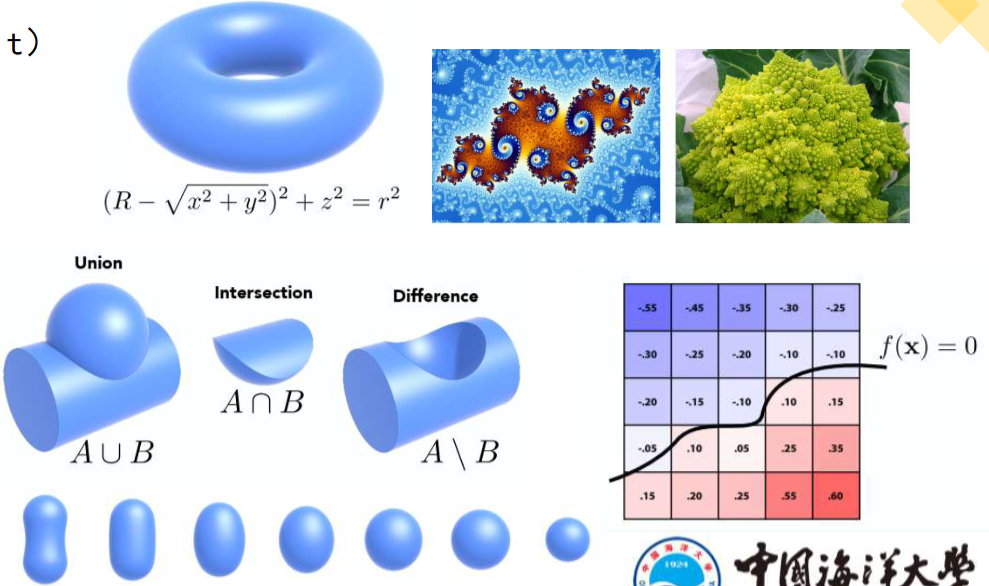
隐式
优点
- 内外测试简单
- 描述简洁
- 适合做光面与表面的求交
- 对于简单形状,描述准确,不存在采样误差
- 易于处理拓扑结构
缺点
- 采样困难
- 复杂形状建模困难
例子
代数曲面、水平集、距离函数、构造实体几何、分形
显式
优点
采样简单
缺点
内外测试困难
例子
点云、多边形网格、细分、NURBS、OBJ文件、贝塞尔曲线

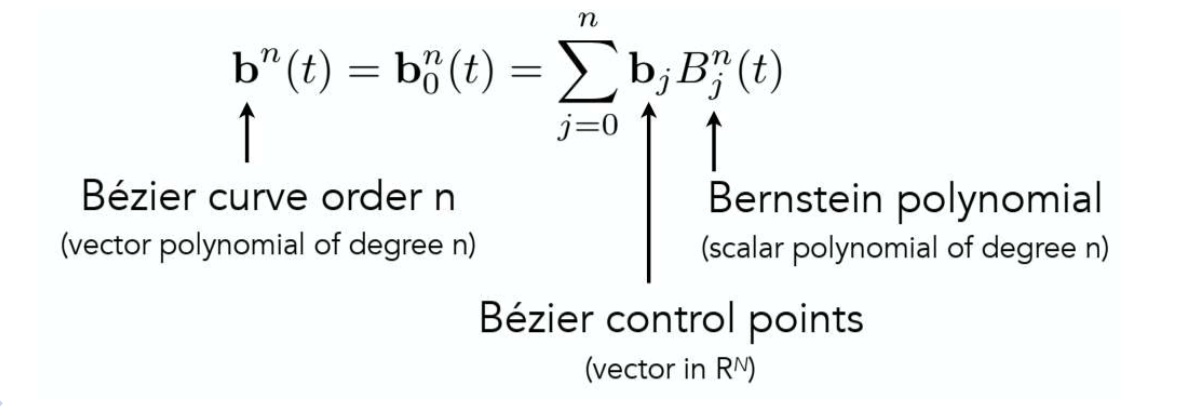
贝塞尔曲线
公式、性质、优缺点、计算
de Casteljau算法:二次&三次
分段Bezier曲线连续性判断
基本概念
公式
性质
-
仿射变换性质
- 通过变换控制带你达到变换曲线的目的
-
凸包性质
- 曲线位于控制点的凸包内
优点
- 形状控制直观,设计灵活,应用较为广泛
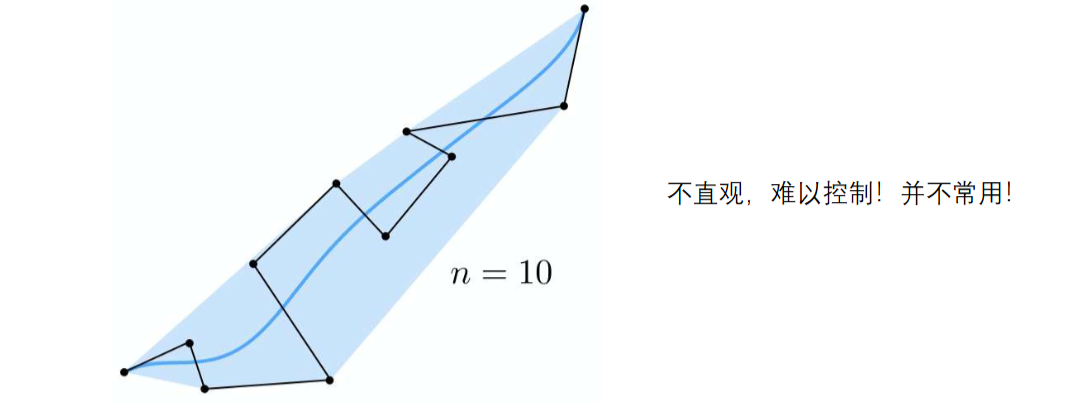
缺点
- 控制顶点数较多时,多边形对曲线的控制能力较弱
- 控制顶点数增多时,生成曲线的阶数也增高
- 曲线拼接需要附加条件,不太灵活
- 局部控制能力弱:因为贝塞尔基函数的值在(0,1)开区间内均不为0,曲线上任意一点都是所有给定顶点的加权平均
二次贝塞尔曲线
考虑三个控制点,求t时刻对应的点
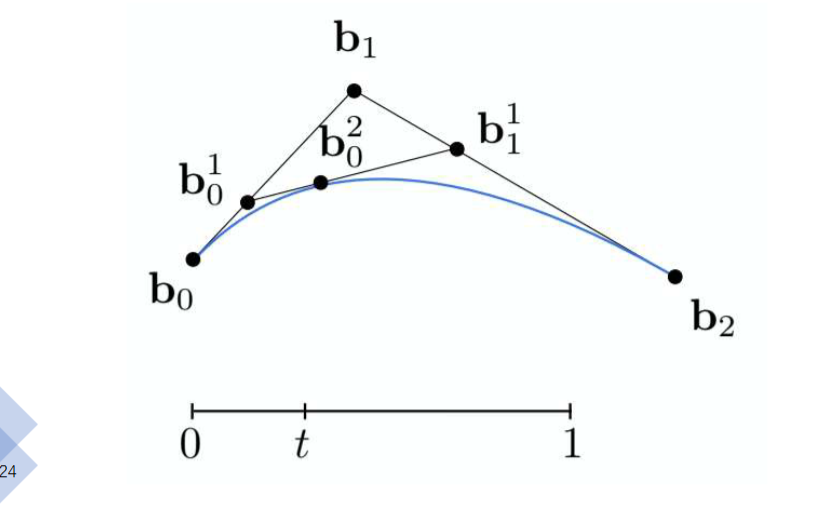
我们进行了三次线性插值。
我们最终得到公式
三次贝塞尔曲线
考虑四个控制点
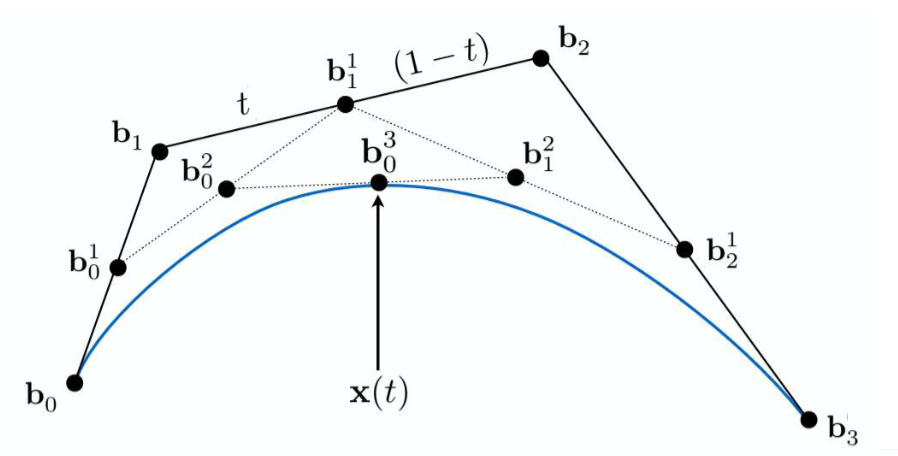
进行六次线性插值
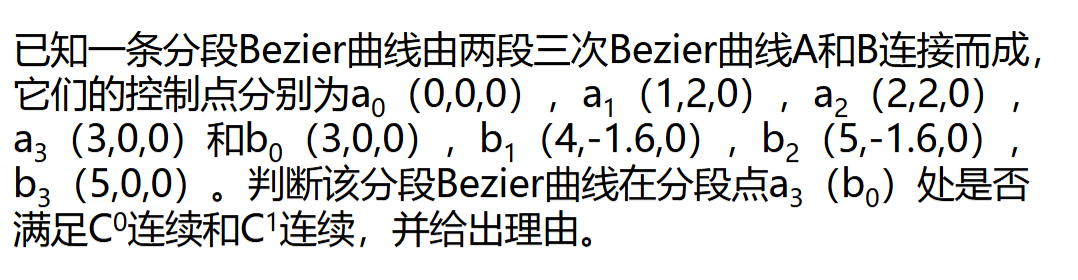
分段贝塞尔曲线的连续性
C0连续性
结尾和开头的值相同
C1连续性
考虑接点处斜率相同
例题

几何处理
几何处理的常见任务
-
重建:给定几何样本、重建表面
-
上采样:通过插值提高分辨率(纹理放大、网格细分)
-
下采样:降低分辨率,同时保持几何体的形状(纹理缩小)
-
重采样:修改样本分布以提高质量。对于图像没这个问题,但是对于网格来说多边形的形状十分重要
-
过滤:消除噪声或者强调重要特征
-
形状分析:识别/理解重要的语义特征
网格细分
网格细分:Loop细分,CatMull-Clark细分(如何加点,适用范围及原因)
Loop细分
- 针对三角形网格的常用细分方法
方法①:将一个三角形一分为四
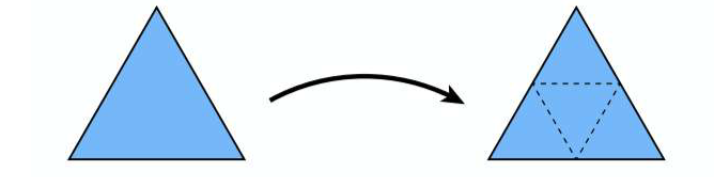
方法②:根据不同权重分配顶点位置
-
对于新顶点(重心插值)
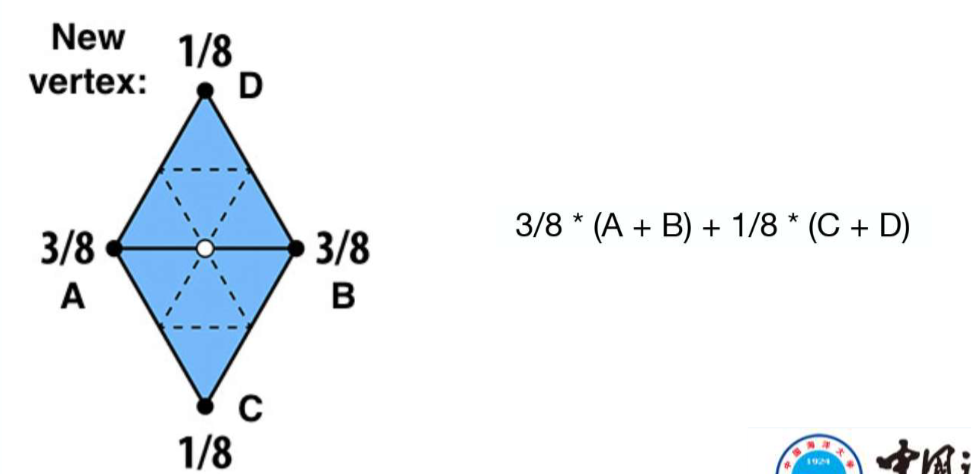
-
对于旧顶点
我先略。有点复杂
方法③:通过边操作进行Loop细分
- 以任意顺序分割原始网格的边

- 反转接触新旧顶点的新边

- 最后更新顶点位置
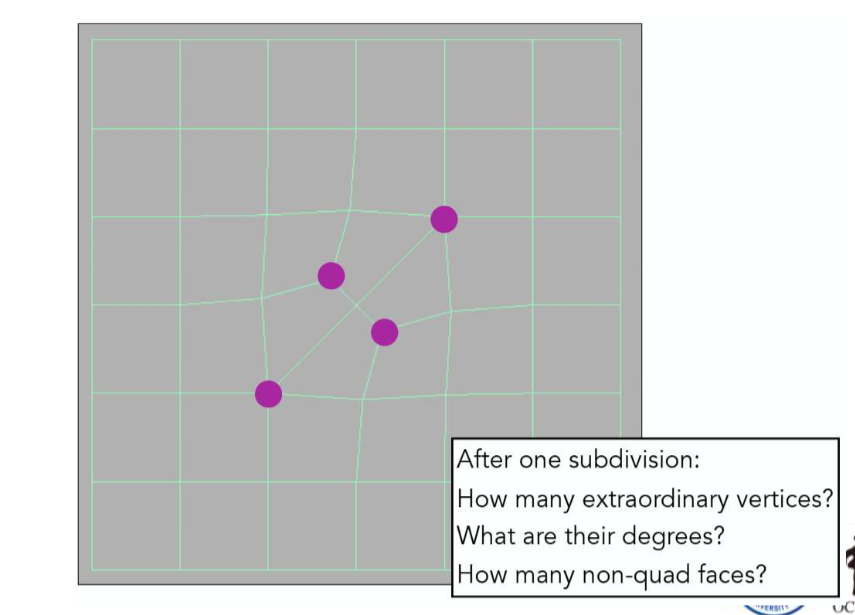
CatMull-Clark细分
- 针对多边形网格,多用于四边形网格
方法
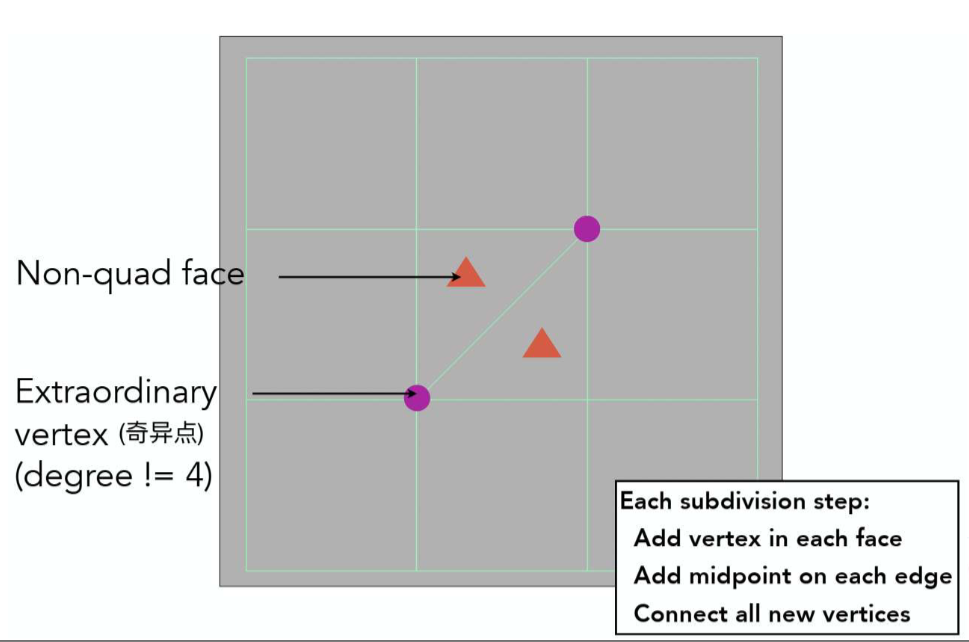
-
找奇异点(degree != 4)
-
添加面点
- 取面内所有原始顶点的平均值,找到面心
-
添加边点
- 边点 = (a+b+c+d)/ 4,其中a、b是边的两个端点;c、d是相邻两个面的面点
-
连接新顶点
光线追踪
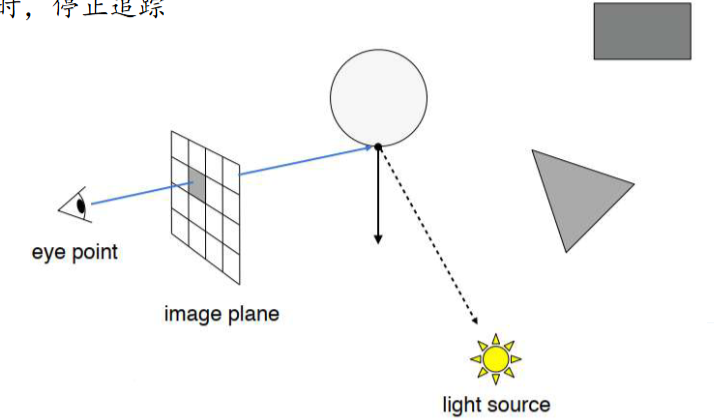
光线投射算法
- 从视点或像素出发,仅对穿过像素的光线反向跟踪
- 当光线路径到达一个离视点最近的可见的不透明物体的表面时,停止追踪
Whitted-Style光线追踪算法
光线投射算法中:被追踪的光线仅从每个像素到离他最近的景物为止
光线追踪算法中:追踪多条光线在场景中的路径,以得到多个景物表面所产生的反射和折射影响
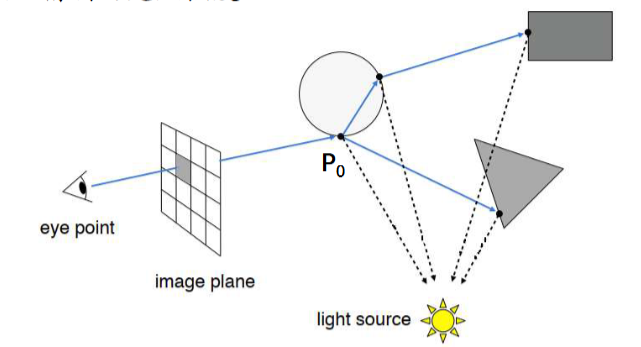
方法
- 沿着到达视点的光线的相反方向追踪
- 经过屏幕上一像素点找出与视线所交的物体表面点P0
- 继续追踪,找出影响P0点光强的所有的光源
- 算出P0点上精确的光照强度
结束条件
- 光线与光源相交
- 光线与漫反射表面相交
- 被追踪给的光线对第一个交点处的贡献趋近于0
光线与三角网格求交
动机
- 渲染:可见性、阴影、光照的计算
- 几何:内部/外部测试
Moller Trumbore算法
光线与包围盒求交
二维
- 分别计算光线与两对平行线的交点
- 求线段的交集,确定最后结果
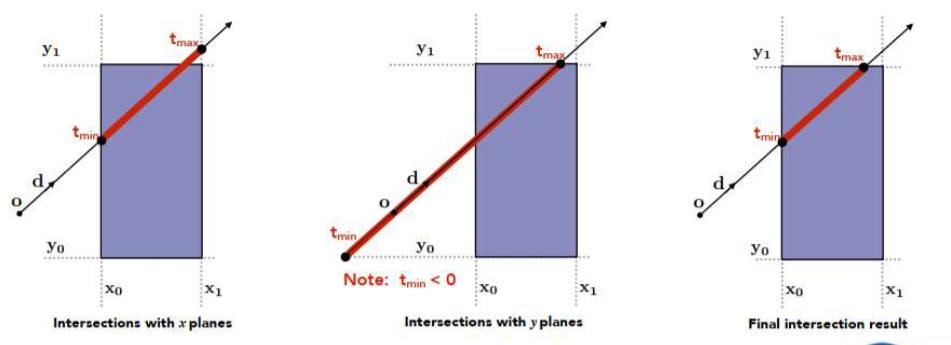
三维——光线与轴对齐包围盒求交
- 仅当光线进入所有成对平板时,光线进入到包围盒内
- 光线离开任意一对平板时,即离开了包围盒
- 对每一对平板,计算 \(t_{min}\) 和 \(t_{max}\)
- 对包围盒, \(t_{enter}\) = \(max(t_{min})\) , \(t_{exit}\) = \(min(t_{max})\) (最晚进去的,最早出来的)
有交点的情况
利用AABB加速光线追踪
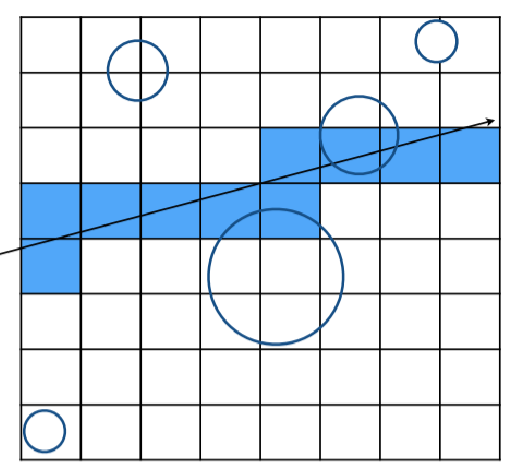
均匀空间划分(Grid)
算法
- 确定包围盒
- 构建均匀网格
- 将物体存储在与物体重叠的相应网格中
- 按照光线穿过的方向逐步地遍历网格;对于每一个网格,测试光线与该网格中存储的所有对象的交集
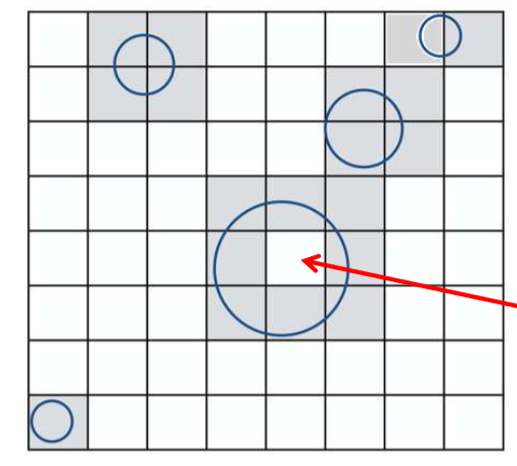
适用场景:空间中存在大量物体,并且它们的大小和空间分布都比较均匀
不适用场景:“运动场中的茶壶”
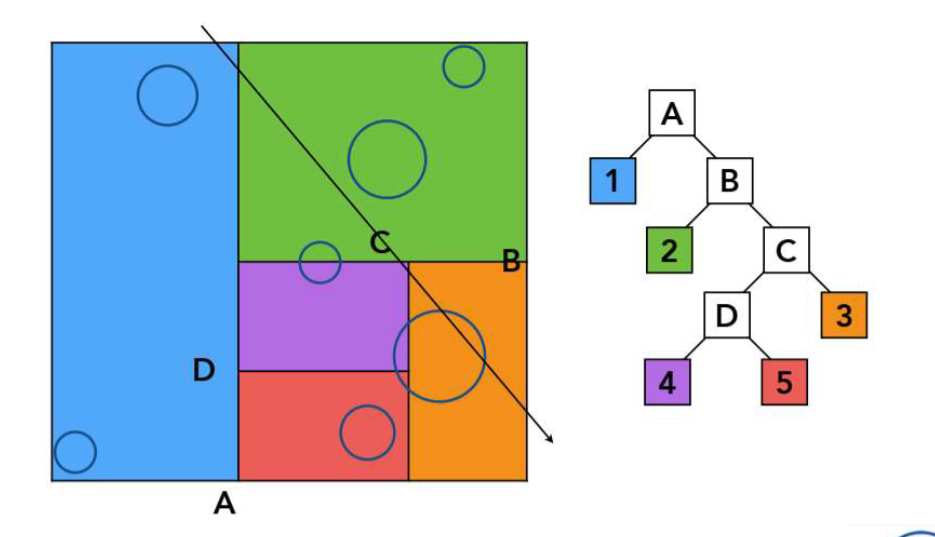
空间划分(KD-Tree)
把空间划分成不重叠的区域
空间中的一个物体可能包含在不同的区域中
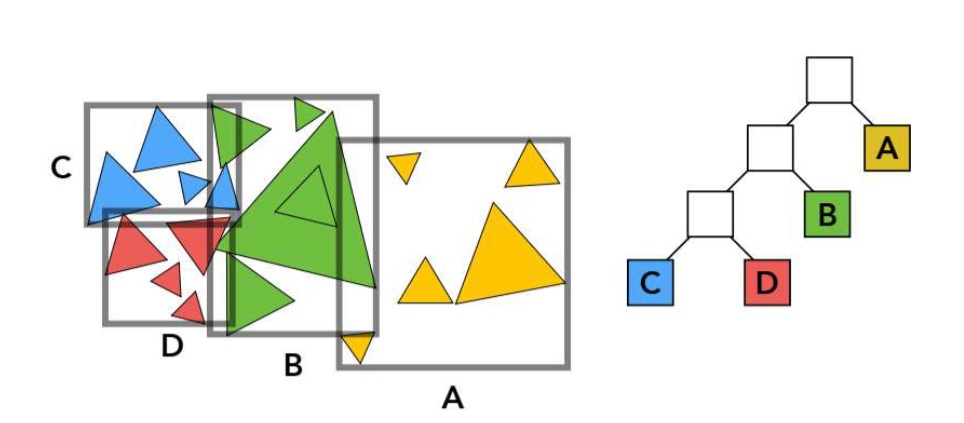
物体划分(层次包围盒BVH)
把物体几何划分成不相交的子集
包含每个子集的包围盒在空间中可能存在重叠
路径追踪
Whitted Ray Tracing仅处理镜面反射和折射,而路径追踪的反射类型包括漫反射。
直接光照
向光源采样,无需RR
间接光照
半球随机采样,必须RR
- 从摄像机通过像素发射一条光线
- 找到光线与物体的交点 p
- 在 p 的半球面上 随机选择一个方向 发射下一条光线
- 为了防止光线无线弹射,引入俄罗斯轮盘赌。以概率P继续弹射,以 1-P停止并返回
动画与模拟
计算机动画的基本技术(概念、利弊)
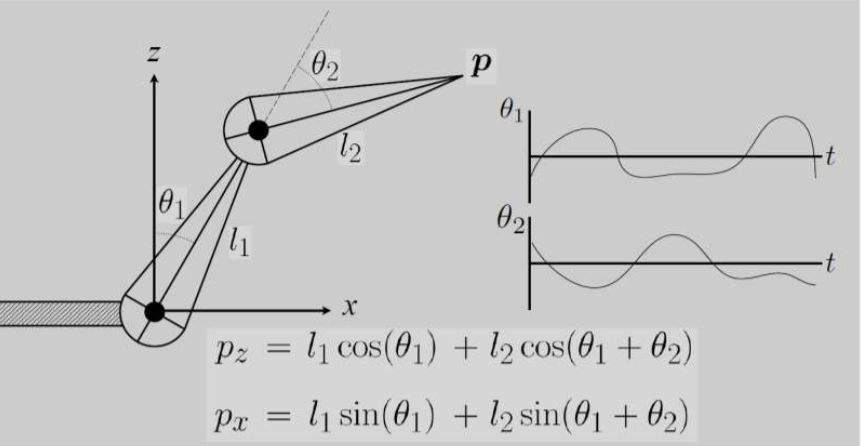
正向运动学
动画师提供角度,计算机确定末端位置p
动画被描述为关于时间的角度参数值的函数
优点
- 直接控制,非常方便
- 很直观,容易实现
缺点
- 动画可能与物理规律不一致
- 艺术家需要耗费大量时间
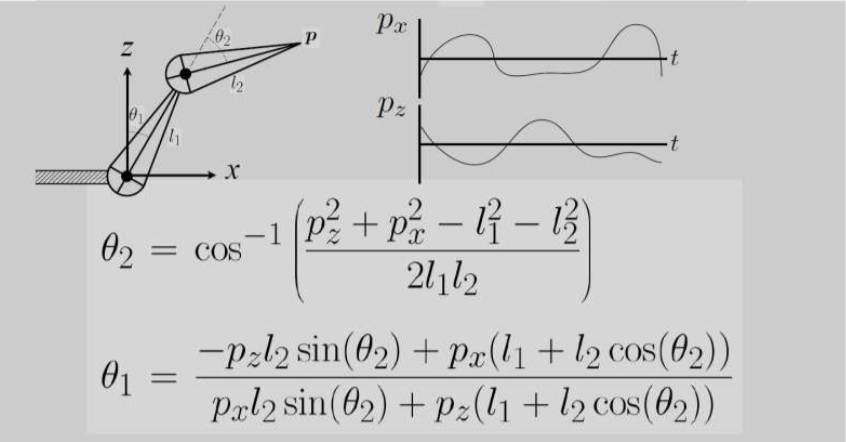
逆向运动学
动画师提供末端位置p,计算机必须给出满足约束条件的关节角度
缺点
- 可能无解或有多个解
动画绑定
动画绑定是一组更高级别的对动画角色的控制操作,允许更快速和直观的修改姿势、变形、表情等。
缺点
- 应用起来代价高
- 人力成本高
- 对艺术造诣和技术能力都有较高要求。我只能说确实
动作捕捉
动画捕捉是利用数据驱动的方式来创建动画序列。包括记录真实世界中人的行为,从收集到的数据中提取姿态,生成关于时间的函数
优点
- 能够快速捕获大量真实数据
- 生成的动画真实度高
缺点
- 需要复杂和昂贵的前期配置
- 捕获的动画可能不符合艺术需求,还需要后期修改
PPT上的题目

 浙公网安备 33010602011771号
浙公网安备 33010602011771号