
主成分分析PCA算法笔记
导论
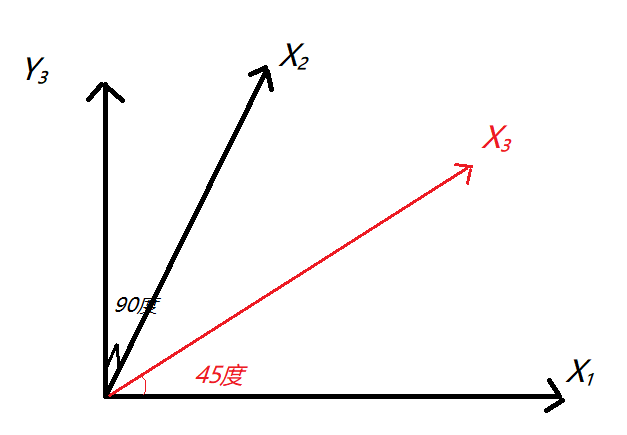
当自变量X₁和X₂分别为(1,2,4,5,15),(1,2,4,5,15)时,对应因变量Y有相应的取值(7,8,9,14,55);这里的数据随便取的,但是我们发现X₁和X₂有个线性关系;甚至我们可以生成一个X₃坐标轴,以45度夹在X₁轴和X₂轴之间,以代替X₁轴和X₂轴来对应因变量Y,这便是将数据降维了,图示如下
如果选取了X₃轴,发现数据在其轴的投影的方差变大了。俯视图如下:
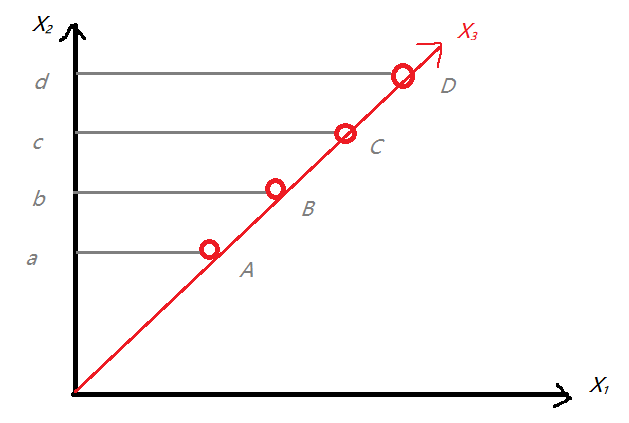
明显,a,b,c,d之间的方差小于A,B,C,D之间的方差,而且恰恰X₃轴能更好地拟合这条直线。
似乎信号论有什么:方差大的方向是数据方向,方差小的方向是噪声方向;于是我们应该在PCA分析中首先将方差大的方向依次进行保留,方差最小的那么几个可以舍去;
求特征值与特征向量
于是主成分分析的任务在于将原来的坐标轴进行旋转,使其到达数据投影方差最大的几个轴;
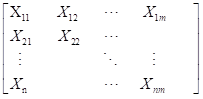
首先采集n维因变量的数据各m个,组成数据阵N:
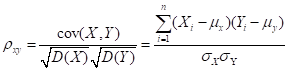
如果多维的因变量之间量纲不同,选取相关系数矩阵研究,由于
将数据阵N内的数据进行标准化处理(去量纲化): ,构成的矩阵称为设计阵A,那么相关系数矩阵可以表示为AA’
,构成的矩阵称为设计阵A,那么相关系数矩阵可以表示为AA’
如果多维的因变量之间量纲相同,选取协方差矩阵研究,
标准化即为去中心化:
,构成的矩阵称为设计阵A,那么协方差矩阵可以表示为AA'/(n-1)
至于有(n-1),是因为样本(协)方差的无偏估计要求的;
后续提到的x不是原数据,而是标准后数据
设相关系数矩阵(协方差矩阵)为C,C为实对称矩阵,那么它的特征向量注定正交;且可对角化为:  ,P为特征向量的集合,中间的为特征值对角阵:
,P为特征向量的集合,中间的为特征值对角阵:

特征值等于方差
先抛出结论:相关系数矩阵(协方差矩阵)的特征值=数据在新坐标轴上的方差
首先作为特征向量矩阵P,是个正交矩阵,据说就是这个玩意把坐标轴旋转到了恰当的地步,达到PCA的要求;那么对于新数据向量z理应等于p乘以标准化的数据x,这样,新数据矩阵也理应各个正交,而没有协方差。它的协方差矩阵为对角阵,对角元素即为自方差;
对于新数据协方差矩阵(省去n-1的运算,结论不变):
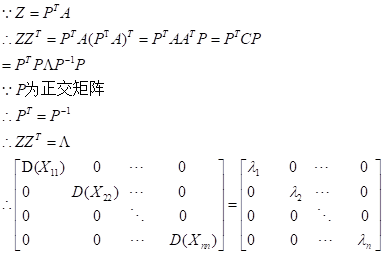
故此,相关系数矩阵(协方差矩阵)的特征值=数据在新坐标轴上的方差
尾注
对于原先坐标轴,基系为单位矩阵E,就比如X₁轴向量为[1 0],X₂轴向量为[0 1],组合起来便为单位矩阵E;而对于任意向量V,在此空间的变换为E*V=V,也就是不变;
而对于变换后的坐标轴,比如对原基系E做旋转变换而成,旋转矩阵为正交矩阵P,此空间的基系便为E*P=P,原向量V在此空间产生变换,为P*V,原向量在此空间形式便为向量P*V。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号