SIFT图像配准 python3.6 + opencv3.3代码
opencv3.x 中部分函数有改变:
1. SIFT:可以采用help(cv2.xfeatures2d)查询
2.drawKeypoints: 同样采用help()方法查询
opencv3 版本sift,surf 及其他不稳定的算法函数都放在opencv3.x的contrib版里。该模块下载地址 https://www.lfd.uci.edu/~gohlke/pythonlibs/
import cv2
import numpy as np
def sift_kp(image):
gray_image = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
sift=cv2.xfeatures2d.SIFT_create()
kp,des = sift.detectAndCompute(image,None)
kp_image = cv2.drawKeypoints(gray_image,kp,None)
return kp_image,kp,des
def get_good_match(des1,des2):
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2) #des1为模板图,des2为匹配图
matches = sorted(matches,key=lambda x:x[0].distance/x[1].distance)
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append(m)
return good
def siftImageAlignment(img1,img2):
_,kp1,des1 = sift_kp(img1)
_,kp2,des2 = sift_kp(img2)
goodMatch = get_good_match(des1,des2)
if len(goodMatch) > 4:
ptsA= np.float32([kp1[m.queryIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ptsB = np.float32([kp2[m.trainIdx].pt for m in goodMatch]).reshape(-1, 1, 2)
ransacReprojThreshold = 4
H, status =cv2.findHomography(ptsA,ptsB,cv2.RANSAC,ransacReprojThreshold);
imgOut = cv2.warpPerspective(img2, H, (img1.shape[1],img1.shape[0]),flags=cv2.INTER_LINEAR + cv2.WARP_INVERSE_MAP)
return imgOut,H,status
img1 = cv2.imread(r'sift_img/8.png')
img2 = cv2.imread(r'sift_img/7.png')
_,kp1,des1 = sift_kp(img1)
_,kp2,des2 = sift_kp(img2)
goodMatch = get_good_match(des1,des2)
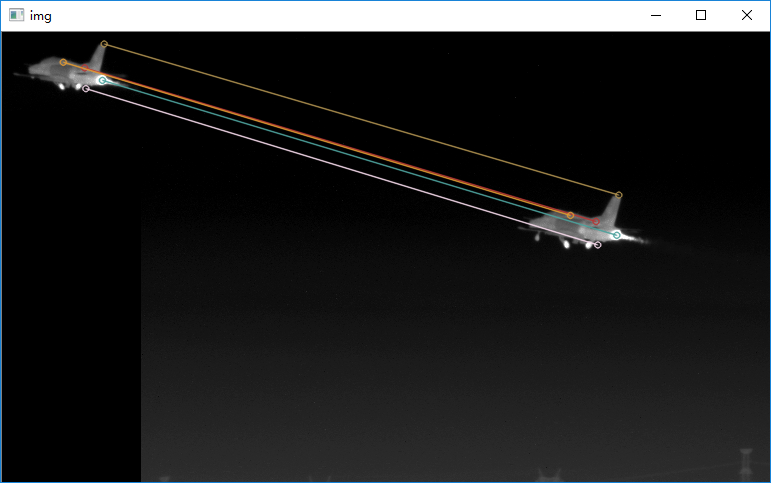
img3 = cv2.drawMatches(img1, kp1, img2, kp2, goodMatch[:5], None, flags=2)
#----or----
#goodMatch = np.expand_dims(goodMatch,1)
#img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, goodMatch[:5], None, flags=2)
cv2.imshow('img',img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
SIFT特征详解:
http://www.cnblogs.com/wangguchangqing/p/4853263.html
http://blog.csdn.net/abcjennifer/article/details/7639681

 浙公网安备 33010602011771号
浙公网安备 33010602011771号