【SLAM】6.SLAM十四讲——相机与图像
一.相机模型
1.1 SLAM的本质
定位与建图,那么,输入信息是什么?输出信息是什么?
输入是传感器对运动的里程测量、周围环境的探知,输出是当前位置和周围环境地图。
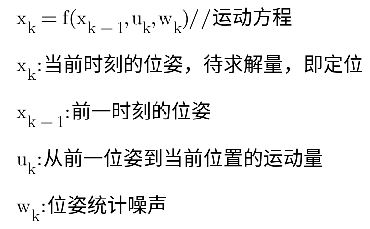
1.2 运动方程
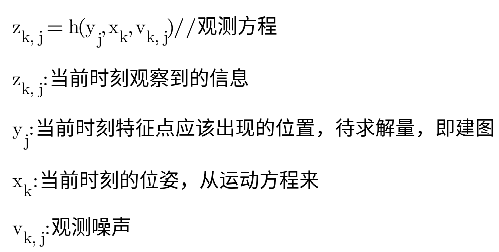
1.3 观测方程
二.相机坐标系——单目小孔成像
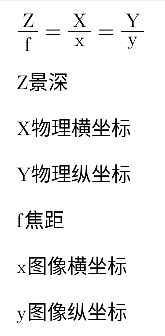
2.1 小孔成像模型
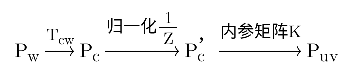
2.2 像素系与成像平面的关系——内参矩阵
推导见教程
针孔相机小孔成像模型

2.3 畸变问题
不必记公式,在归一化坐标乘以内参矩阵之前进行畸变矫正,然后再乘以内参矩阵得到图像坐标
(1)透镜畸变、径向畸变
包括桶形畸变、枕形畸变
修正方式:作极坐标修正
(2)成像平面、切向畸变
由于镜头与感光板不平行,造成梯形畸变
修正方式:作切向修正
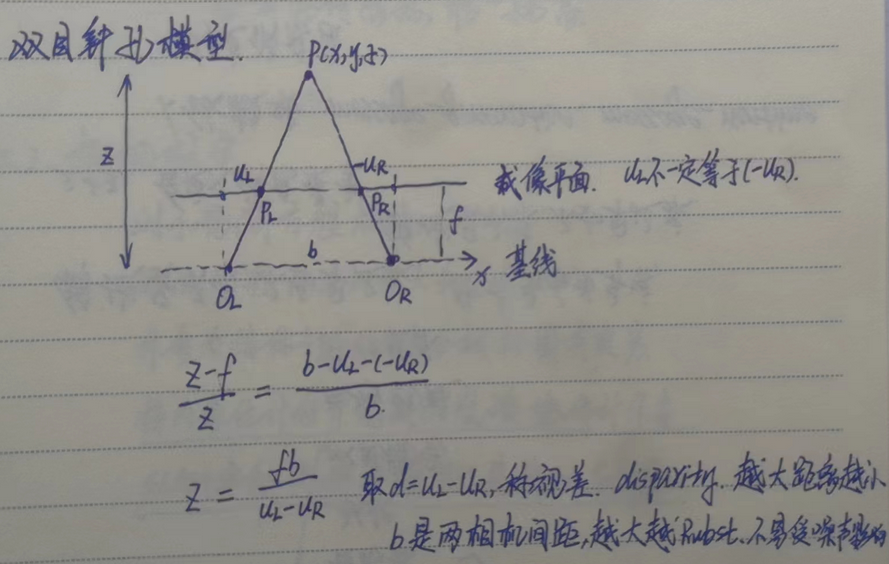
三.相机坐标系——双目针孔模型
3.1 双目针孔模型
推导见教程
3.2 双目遇到的挑战
(1)左右视图的特征匹配
(2)计算量大,每个像素都要计算深度信息
四.RGB-D
4.1 种类
结构光、TOF
4.2 优缺点
优点:计算量小,点云三维重建很友好
缺点:
(1)易受日光影响
(2)不同相机间可能会干扰
(3)没办法检测透射物体
(4)有源传感器,能耗高
五.相机标定
对于观测方程Z=h(x,y)而言,
要使用观测到的图像特征推测物理世界中的物体坐标,涉及到内参矩阵K和外参矩阵T,
外参为待估计量,内参为相机的固有变量,
将内参提前估计好才能准确地估计外参,
SLAM要解决的就是在已知内参和其他信息的情况下,准确地估计x和y。
5.1 常用标定工具
一般标定精度要到0.5pixel
(1)Matlab
(2)OpenCV
(3)Kalibr(ROS),支持多种相机模型,如多相机、VIO、多IMU内参标定、针孔相机、鱼眼相机
5.2 常用相机
Realsense
ZED双目
Kinect结构光
工业相机

 浙公网安备 33010602011771号
浙公网安备 33010602011771号