
Direct3D 11 Tutorial 4: 3D Spaces_Direct3D 11 教程4:3D空间
概述
在上一个教程中,我们在应用程序窗口的中心成功渲染了一个三角形。 我们没有太注意我们在顶点缓冲区中拾取的顶点位置。 在本教程中,我们将深入研究3D位置和转换的细节。
本教程的结果将是渲染到屏幕的3D对象。 虽然之前的教程侧重于将2D对象渲染到3D世界,但在这里我们展示了一个3D对象。
资源目录
(SDK root)\Samples\C++\Direct3D11\Tutorials\Tutorial04
3D空间
在上一个教程中,三角形的顶点被有策略地放置,以在屏幕上完美地对齐。 但是,情况并非总是如此。 因此,我们需要一个系统来表示3D空间中的对象和一个显示它们的系统。
在现实世界中,物体存在于3D空间中。 这意味着要将对象放置在世界中的特定位置,我们需要使用坐标系并定义与位置对应的三个坐标。 在计算机图形学中,3D空间最常用于笛卡尔坐标系。 在该坐标系中,三个轴X,Y和Z彼此垂直,决定了空间中每个点的坐标。 该坐标系进一步分为左手系统和右手系统。 在左手系统中,当X轴指向右侧,Y轴指向上方时,Z轴指向前方。 在右手系统中,具有相同的X和Y轴,Z轴指向后方。
图1.左手坐标系与右手坐标系

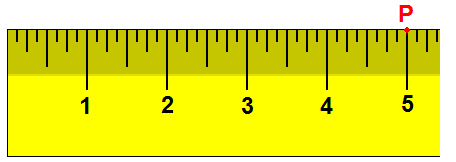
现在我们已经讨论过坐标系,考虑3D空间。 点在不同的空间中具有不同的坐标。 作为一维中的一个例子,假设我们有一个标尺,我们注意到标尺的5英寸标记处的点P. 现在,如果我们将标尺向右移动1英寸,则相同的点位于4英寸标记处。 通过移动标尺,参考框架已经改变。 因此,当点没有移动时,它有一个新的坐标。
图2. 1D中的空间图示
在3D中,空间通常由原点和来自原点的三个唯一轴定义:X,Y和Z.计算机图形中通常使用多个空间:对象空间,世界空间,视图空间,投影空间和屏幕空间。
图3.在对象空间中定义的立方体
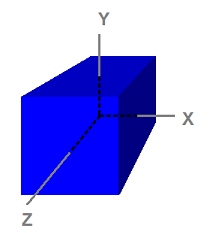
对象空间
(-1, 1, -1)
( 1, 1, -1)
(-1, -1, -1)
( 1, -1, -1)
(-1, 1, 1)
( 1, 1, 1)
(-1, -1, 1)
( 1, -1, 1)
世界空间
视图空间
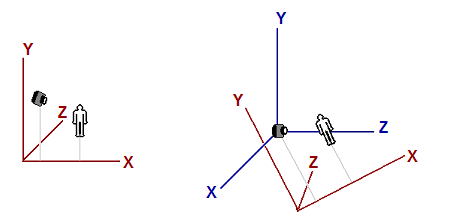
左图显示了一个场景,该场景由类似人的物体和观察物体的观察者(相机)组成。 世界空间使用的原点和轴以红色显示。 右图显示了与世界空间相关的视图空间。 视图空间轴显示为蓝色。 为了更清楚地说明,视图空间与左图像中的世界空间的方向与读者不同。 请注意,在视图空间中,查看器正在Z方向上查看。
投影空间
投影空间是指从视图空间应用投影变换后的空间。 在此空间中,可见内容的X和Y坐标范围为-1到1,Z坐标范围为0到1。
屏幕空间
屏幕空间通常用于指代帧缓冲区中的位置。 因为帧缓冲区通常是2D纹理,所以屏幕空间是2D空间。 左上角是坐标为(0,0)的原点。 正X向右,正Y向下。 对于w像素宽且h像素高的缓冲区,最右下像素具有坐标(w-1,h-1)。
空间对空间的转换
转换最常用于将顶点从一个空间转换为另一个空间。 在3D计算机图形学中,管道中逻辑上有三种这样的变换:世界,视图和投影变换。 下一个教程将介绍单个转换操作,如转换,旋转和缩放。
世界转换
顾名思义,世界转换将顶点从对象空间转换为世界空间。 它通常由一个或多个缩放,旋转和平移组成,基于我们想要给对象的大小,方向和位置。 场景中的每个对象都有自己的世界变换矩阵。 这是因为每个对象都有自己的大小,方向和位置。
视图转换
顶点转换为世界空间后,视图转换将这些顶点从世界空间转换为视图空间。 回想一下之前的讨论,观看空间是世界从观众(或相机)的角度出现的。 在视图空间中,观察者位于沿正Z轴向外看的原点。
值得注意的是,尽管视图空间是来自观察者参照系的世界,但视图变换矩阵应用于顶点,而不是观察者。 因此,视图矩阵必须执行我们应用于我们的查看器或相机的相反转换。 例如,如果我们想要将摄像机朝向-Z方向移动5个单元,我们需要计算一个视图矩阵,它可以沿着+ Z方向将顶点平移5个单位。 虽然相机向后移动,但从相机的角度来看,顶点已向前移动。 在XNA Math中,一个方便的API调用XMMatrixLookAtLH()通常用于计算视图矩阵。 我们只需要告诉它观察者在哪里,在哪里看,以及表示观察者顶部的方向,也称为向上矢量,以获得相应的视图矩阵。
投影转换
投影变换将顶点从诸如世界和视图空间的3D空间转换为投影空间。 在投影空间中,顶点的X和Y坐标是从3D空间中该顶点的X / Z和Y / Z比获得的。
图5.投影
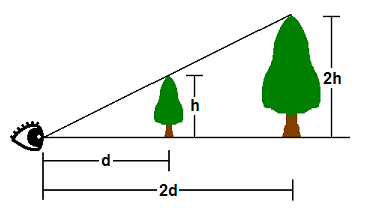
在3D空间中,事物以透视的方式出现。 也就是说,物体越近,它出现的越大。 如图所示,在远离观察者眼睛的d个单位处高h单位的树的尖端将出现在与另一棵树的尖端2h单位高和2d单位远的相同点处。 因此,在2D屏幕上出现顶点的位置与其X / Z和Y / Z比率直接相关。
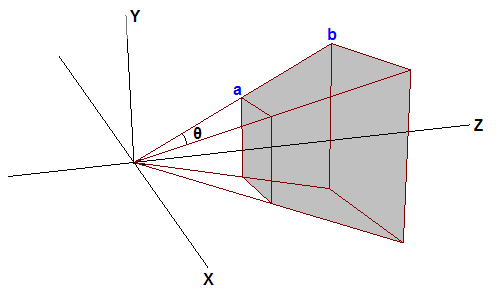
定义3D空间的参数之一称为视场(FOV)。 FOV表示在特定方向上查看哪些对象从特定位置可见。 人类有一个前瞻性的FOV(我们无法看到我们背后的东西),我们看不到太近或太远的物体。 在计算机图形学中,FOV包含在视锥体中。 视锥体由3D中的6个平面定义。 这些平面中的两个平行于XY平面。 这些被称为近Z和远Z平面。 其他四个平面由观察者的水平和垂直视野定义。 视场越宽,视锥体体积越宽,观察者看到的物体越多。
GPU会过滤掉视锥体外的对象,这样就不必花时间渲染无法显示的内容。 此过程称为裁剪。 视锥体是一个四面金字塔,顶部被切掉。 剪切此卷是很复杂的,因为要剪切一个视锥体平面,GPU必须将每个顶点与平面的等式进行比较。 相反,GPU通常首先执行投影变换,然后针对视锥体量进行剪辑。 投影变换对视锥体的影响是金字塔形视锥体成为投影空间中的盒子。 这是因为,如前所述,在投影空间中,X和Y坐标基于3D空间中的X / Z和Y / Z. 因此,点a和点b在投影空间中将具有相同的X和Y坐标,这就是视锥体成为盒子的原因。
图6.查看平截头体
假设两棵树的尖端恰好位于顶视图平截头体边缘。进一步假设d = 2h。沿投影空间中顶边的Y坐标将为0.5(因为h / d = 0.5)。因此,任何大于0.5的Y投影后Y值都将被裁剪。这里的问题是0.5由程序选择的垂直视场确定,并且不同的FOV值导致GPU必须剪切的不同值。为了使这个过程更加方便,3D程序通常缩放顶点的投影X和Y值,以便可见的X和Y值的范围从-1到1.换句话说,任何X或Y坐标都在[-1]之外1]范围将被删除。为了使该剪切方案起作用,投影矩阵必须通过h / d或d / h的倒数来缩放投影顶点的X和Y坐标。 d / h也是FOV一半的余切。通过缩放,视锥体的顶部变为h / d * d / h = 1.大于1的任何内容都将被GPU裁剪。这就是我们想要的。
通常也对投影空间中的Z坐标进行类似的调整。 我们希望近和远Z平面分别在投影空间中为0和1。 当Z = 3D空间中的近Z值时,Z在投影空间中应为0; 当Z = 3D空间中的远Z时,Z在投影空间中应为1。 完成此操作后,GPU [0 1]以外的任何Z值都将被裁剪掉。
在Direct3D 11中,获取投影矩阵的最简单方法是调用XMMatrixPerspectiveFovLH()方法。 我们只提供4个参数-FOVy,Aspect,Zn和Zf-并返回一个矩阵,它可以完成上面提到的所有必要操作。 FOVy是Y方向的视野。 Aspect是宽高比,即视图宽度与高度的比率。 从FOVy和Aspect,可以计算FOVx。 该纵横比通常从渲染目标宽度与高度的比率获得。 Zn和Zf分别是视图空间中的近和远Z值。
使用转换
在上一个教程中,我们编写了一个程序,用于渲染单个三角形。 当我们创建顶点缓冲区时,我们使用的顶点位置直接在投影空间中,这样我们就不必执行任何变换。 现在我们已经了解了3D空间和变换,我们将修改程序,以便在对象空间中定义顶点缓冲区,就像它应该的那样。 然后,我们将修改顶点着色器以将顶点从对象空间转换为投影空间。
修改顶点缓冲区
由于我们开始以三维方式表示事物,因此我们将前一个教程中的平面三角形更改为多维数据集。 这将使我们能够更清楚地展示这些概念。
SimpleVertex vertices[] =
{
{ XMFLOAT3( -1.0f, 1.0f, -1.0f ), XMFLOAT4( 0.0f, 0.0f, 1.0f, 1.0f ) },
{ XMFLOAT3( 1.0f, 1.0f, -1.0f ), XMFLOAT4( 0.0f, 1.0f, 0.0f, 1.0f ) },
{ XMFLOAT3( 1.0f, 1.0f, 1.0f ), XMFLOAT4( 0.0f, 1.0f, 1.0f, 1.0f ) },
{ XMFLOAT3( -1.0f, 1.0f, 1.0f ), XMFLOAT4( 1.0f, 0.0f, 0.0f, 1.0f ) },
{ XMFLOAT3( -1.0f, -1.0f, -1.0f ), XMFLOAT4( 1.0f, 0.0f, 1.0f, 1.0f ) },
{ XMFLOAT3( 1.0f, -1.0f, -1.0f ), XMFLOAT4( 1.0f, 1.0f, 0.0f, 1.0f ) },
{ XMFLOAT3( 1.0f, -1.0f, 1.0f ), XMFLOAT4( 1.0f, 1.0f, 1.0f, 1.0f ) },
{ XMFLOAT3( -1.0f, -1.0f, 1.0f ), XMFLOAT4( 0.0f, 0.0f, 0.0f, 1.0f ) },
};
如果你注意到我们所做的只是指定立方体上的八个点,但我们实际上没有描述各个三角形。 如果我们按原样传递,输出将不是我们所期望的。 我们需要通过这八个点指定形成立方体的三角形。
在立方体上,许多三角形将共享相同的顶点,并且一次又一次地重新定义相同的点将浪费空间。 因此,有一种方法只指定八个点,然后让Direct3D知道要为三角形选择哪些点。 这是通过索引缓冲区完成的。 索引缓冲区将包含一个列表,该列表将引用缓冲区中的顶点索引,以指定在每个三角形中使用哪些点。 下面的代码显示了构成每个三角形的点。
// Create index buffer
WORD indices[] =
{
3,1,0,
2,1,3,
0,5,4,
1,5,0,
3,4,7,
0,4,3,
1,6,5,
2,6,1,
2,7,6,
3,7,2,
6,4,5,
7,4,6,
};
如您所见,第一个三角形由点3,1和0定义。这意味着第一个三角形的顶点位于:( - 1.0f,1.0f,1.0f),(1.0f,1.0f,-1.0) f),和(-1.0f,1.0f,-1.0f)。 立方体上有六个面,每个面由两个三角形组成。 因此,您会看到此处定义的12个三角形。
由于每个顶点都是明确列出的,并且没有两个三角形共享边(至少,它已经被定义),这被认为是一个三角形列表。 总的来说,对于三角形列表中的12个三角形,我们将需要总共36个顶点。
索引缓冲区的创建与顶点缓冲区非常相似,我们在结构中指定了诸如大小和类型之类的参数,并称为CreateBuffer。 类型是D3D11_BIND_INDEX_BUFFER,因为我们使用DWORD声明了我们的数组,所以我们将使用sizeof(DWORD)。
D3D11_BUFFER_DESC bd;
ZeroMemory( &bd, sizeof(bd) );
bd.Usage = D3D11_USAGE_DEFAULT;
bd.ByteWidth = sizeof( WORD ) * 36; // 36 vertices needed for 12 triangles in a triangle list
bd.BindFlags = D3D11_BIND_INDEX_BUFFER;
bd.CPUAccessFlags = 0;
bd.MiscFlags = 0;
InitData.pSysMem = indices;
if( FAILED( g_pd3dDevice->CreateBuffer( &bd, &InitData, &g_pIndexBuffer ) ) )
return FALSE;
一旦我们创建了这个缓冲区,我们就需要设置它,以便Direct3D知道在生成三角形时引用这个索引缓冲区。 我们指定缓冲区的指针,格式和缓冲区中的偏移量以开始引用。
// Set index buffer
g_pImmediateContext->IASetIndexBuffer( g_pIndexBuffer, DXGI_FORMAT_R16_UINT, 0 );
修改顶点着色器
在上一个教程的顶点着色器中,我们采用输入顶点位置并输出相同的位置而不进行任何修改。我们可以这样做,因为输入顶点位置已经在投影空间中定义。现在,因为输入顶点位置是在对象空间中定义的,所以我们必须在从顶点着色器输出之前对其进行变换。我们通过三个步骤完成此任务:从对象转换到世界空间,从世界转换到视图空间,以及从视图转换到投影空间。我们需要做的第一件事是声明三个常量缓冲区变量。常量缓冲区用于存储应用程序需要传递给着色器的数据。在渲染之前,应用程序通常会将重要数据写入常量缓冲区,然后在渲染过程中可以从着色器中读取数据。在FX文件中,常量缓冲区变量在C ++结构中声明为全局变量。我们将使用的三个变量是HLSL类型“矩阵”的世界,视图和投影变换矩阵。
一旦我们声明了我们需要的矩阵,我们就会更新顶点着色器以使用矩阵变换输入位置。 通过将矢量乘以矩阵来变换矢量。 在HLSL中,这是使用mul()内部函数完成的。 我们的变量声明和新的顶点着色器如下所示:
cbuffer ConstantBuffer : register( b0 )
{
matrix World;
matrix View;
matrix Projection;
}
//
// Vertex Shader
//
VS_OUTPUT VS( float4 Pos : POSITION, float4 Color : COLOR )
{
VS_OUTPUT output = (VS_OUTPUT)0;
output.Pos = mul( Pos, World );
output.Pos = mul( output.Pos, View );
output.Pos = mul( output.Pos, Projection );
output.Color = Color;
return output;
}
在顶点着色器中,每个 mul()将一个变换应用于输入位置。 世界,视图和投影变换按顺序依次应用。 这是必要的,因为向量和矩阵乘法不是可交换的。
设置矩阵
我们更新了顶点着色器以使用矩阵进行变换,但我们还需要在程序中定义三个矩阵。 这三个矩阵将存储渲染时要使用的变换。 在渲染之前,我们将这些矩阵的值复制到着色器常量缓冲区。 然后,当我们通过调用Draw()启动渲染时,我们的顶点着色器读取存储在常量缓冲区中的矩阵。 除了矩阵之外,我们还需要一个代表常量缓冲区的ID3D11Buffer对象。 因此,我们的全局变量将添加以下内容:
ID3D11Buffer* g_pConstantBuffer = NULL;
XMMATRIX g_World;
XMMATRIX g_View;
XMMATRIX g_Projection;
要创建ID3D11Buffer对象,我们使用 ID3D11Device :: CreateBuffer()并指定D3D11_BIND_CONSTANT_BUFFER
D3D11_BUFFER_DESC bd;
ZeroMemory( &bd, sizeof(bd) );
bd.Usage = D3D11_USAGE_DEFAULT;
bd.ByteWidth = sizeof(ConstantBuffer);
bd.BindFlags = D3D11_BIND_CONSTANT_BUFFER;
bd.CPUAccessFlags = 0;
if( FAILED(g_pd3dDevice->CreateBuffer( &bd, NULL, &g_pConstantBuffer ) ) )
return hr;
我们需要做的下一件事是提出三个矩阵,我们将用它来进行转换。我们希望三角形位于原点上,与XY平面平行。这正是它如何存储在对象空间中的顶点缓冲区中。因此,世界变换不需要做任何事情,我们将世界矩阵初始化为单位矩阵。我们想要设置我们的相机,使其位于[0 1 -5],查看点[0 1 0]。我们可以使用向上矢量[0 1 0]调用 XMMatrixLookAtLH()来方便地为我们计算视图矩阵,因为我们希望+ Y方向始终保持在顶部。最后,为了得到投影矩阵,我们称之为XMMatrixPerspectiveFovLH(),具有90度垂直视场(pi / 2),宽高比为640/480,来自我们的后缓冲区大小,以及近和远Z分别为0.1和110。这意味着屏幕上将看不到小于0.1或超过110的任何内容。这三个矩阵存储在全局变量g_World,g_View和g_Projection中。
更新常量缓冲区
我们有矩阵,现在我们必须在渲染时将它们写入常量缓冲区,以便GPU可以读取它们。 要更新缓冲区,我们可以使用 ID3D11DeviceContext :: UpdateSubresource()API并将指针传递给以与着色器常量缓冲区相同的顺序存储的矩阵。 为了做到这一点,我们将创建一个与着色器中的常量缓冲区具有相同布局的结构。 另外,由于矩阵在C ++和HLSL中的内存排列方式不同,我们必须在更新之前转置矩阵。
//
// Update variables
//
ConstantBuffer cb;
cb.mWorld = XMMatrixTranspose( g_World );
cb.mView = XMMatrixTranspose( g_View );
cb.mProjection = XMMatrixTranspose( g_Projection );
g_pImmediateContext->UpdateSubresource( g_pConstantBuffer, 0, NULL, &cb, 0, 0 );



 浙公网安备 33010602011771号
浙公网安备 33010602011771号