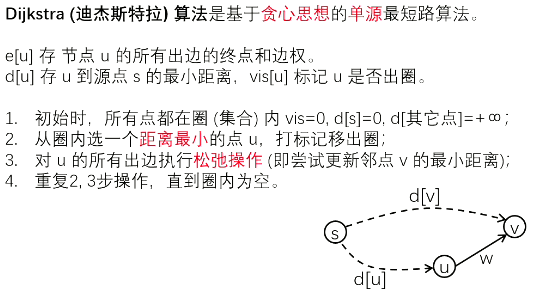
单源最短路
![]()
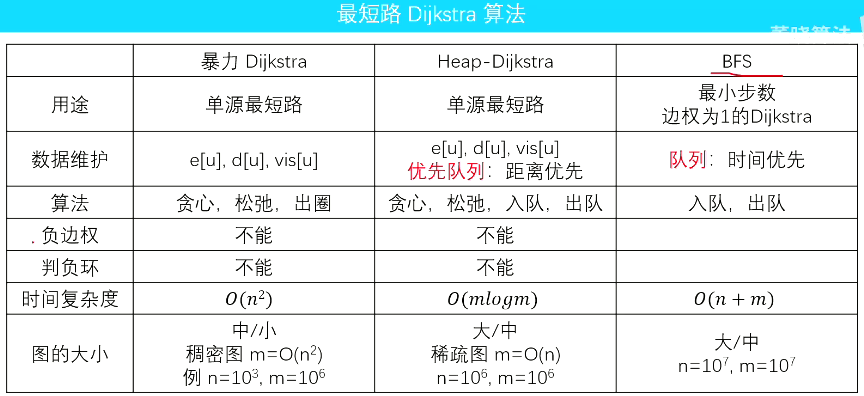
朴素做法
//dijkstra算法 单源最短路
//思路 d[u]存点u到原点s的最小距离,vis[u]记录是否走过
//1.初始化 2.选一个距原点s最小的点 3.将该点相邻点改写最短距离
struct edge{
int v,w;
};
const int N = 1005;
vector <edge> g[N];
int vis[N]={},d[N],n,m;
//时间复杂度 n^2+m 空间复杂度 m
void dijkstra(int s){
//初始化 所有点到原点的距离 d 所有点未被标记
memset(d,0x3f,sizeof(d));
//原点到自己距离为 0
d[s] = 0;
for(int i=1;i<n;i++){
int u = 0;
//注意u为 0不为 1,0相当于哨兵节点,其他点可能被标记
for(int j=1;j<=n;j++){
if(!vis[j]&&d[u]>d[j])
u = j;
//找距离最近且没标记的点
}
for(auto a:g[u]){
if(d[u]+a.w<d[a.v]){
d[a.v] = d[u]+a.w;
}
}
vis[u] = 1;
}
}
堆优化
//堆优化dijkstra 单源最短路
//贪心策略 找到离原点最近距离的点 更新邻点重复
//代码实现 优先队列存节点和距原点距离 vis记录是否走过点数组
struct edge{
int v,w;
};
//存点相邻边
struct node{
int d,l;
friend bool operator<(node n1,node n2){
//注意希望顶元素为小,所以排序从大到小
n1.l > n2.l;
}
};
//存节点给大根堆
const int N = 1005;
int vis[N]={},d[N],n,m,s;
priority_queue <node> pq;
vector <edge> g[N];
//时间复杂度 mlognm 空间复杂度 m
void dijkstra(){
pq.push({s,0});
memset(d,0x3f,sizeof(d));
d[s] = 0;
while(!pq.empty()){
auto nd = pq.top();
cout << nd.d << " " << nd.l << endl;
pq.pop();
//队列可能有多个同节点,不过没有关系
//顶元素最小
if(vis[nd.d]==1) continue;
for(auto a:g[nd.d]){
int le = a.w+nd.l;
d[a.v] = min(d[a.v],le);
pq.push({a.v,le});
}
vis[nd.d] = 1;
}
}
搜索路径
//dijkstra算法 单源最短路
//思路 d[u]存点u到原点s的最小距离,vis[u]记录是否走过
//1.初始化 2.选一个距原点s最小的点 3.将该点相邻点改写最短距离
struct edge{
int v,w;
};
const int N = 1005;
vector <edge> g[N];
int vis[N]={},d[N],n,m,pre[N];
//时间复杂度 n^2+m 空间复杂度 m
void dijkstra(int s){
//初始化 所有点到原点的距离 d 所有点未被标记
memset(d,0x3f,sizeof(d));
//原点到自己距离为 0
d[s] = 0;
for(int i=1;i<n;i++){
int u = 0;
//注意u为 0不为 1,0相当于哨兵节点,其他点可能被标记
for(int j=1;j<=n;j++){
if(!vis[j]&&d[u]>d[j])
u = j;
//找距离最近且没标记的点
}
for(auto a:g[u]){
if(d[u]+a.w<d[a.v]){
d[a.v] = d[u]+a.w;
//记录上一点
pre[a.v] = u;
}
}
vis[u] = 1;
}
}
//搜索路径
void dfs(int x,int s){
if(x==s){
cout << x << " ";
return;
}
dfs(pre[x],s);
cout << x << " ";
}
![]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号