嵌入式学习笔记-Chapter4
第四章、ARM 编程模型
Chapter1、数据类型 处理器工作状态
支持的数据类型:
- 字节:8 位
- 半字:16 位
- 字:32 位
工作状态:
- ARM 状态(字对齐的 ARM 指令)
- Thumb 状态(半字对齐的 Thumb 指令)
Chapter2、存储器及存储器映射 I/O
ARM 处理器将存储器看作是一个从 0 开始的线性递增的字节集合(以字为基本单元)
跳转目标的计算方法:
\(
\text{(当前指令的地址)} + 8\text{(两个字即跳转指令长度)} + \text{偏移量}
\)
下一条指令位置的计算方法:
\(
\text{(当前指令的地址)} + 4\text{(四个字节)}
\)
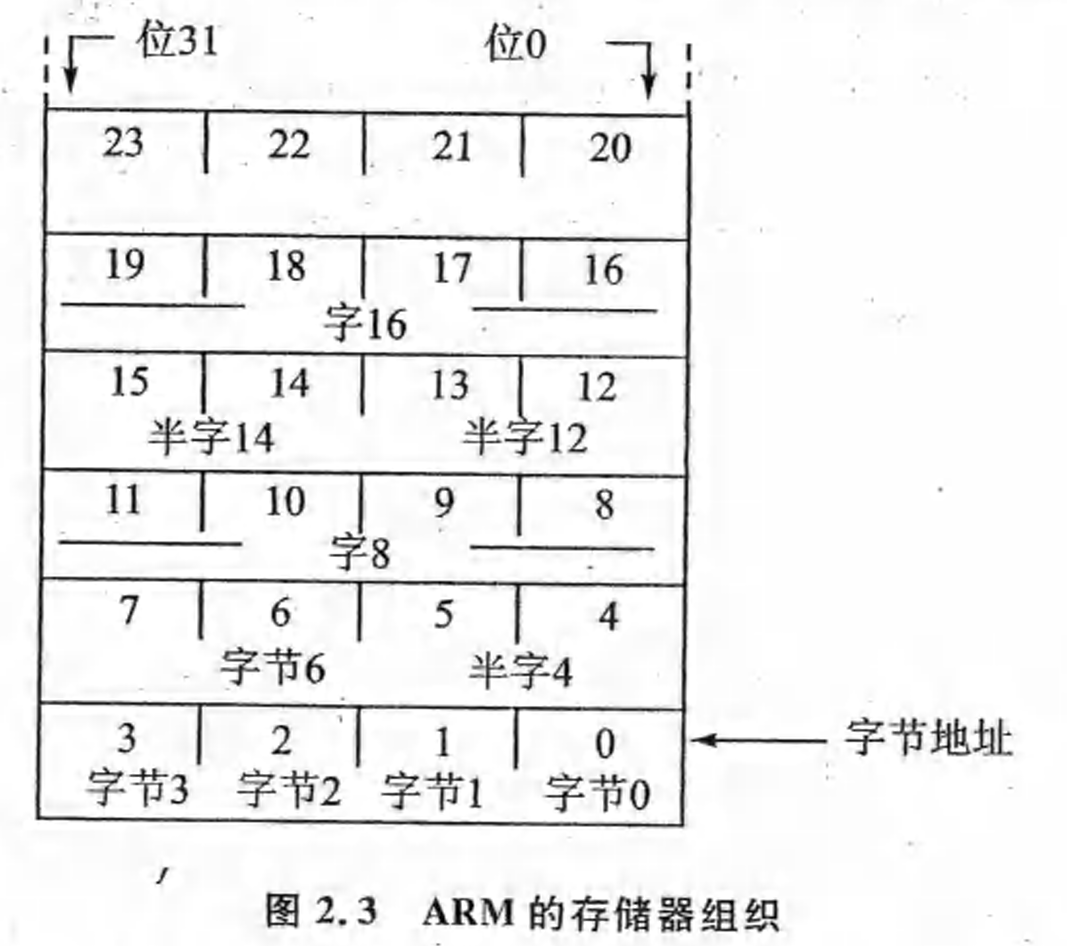
存储器格式:
- 位于地址 A 的字包含的字节位于地址 A,A+1,A+2 和 A+3;
- 位于地址 A 的半字包含的字节位于地址 A 和 A+1;
- 位于地址 A 的字包含的半字位于地址 A 和 A+2;
小端模式:在一个字中,高位数据存放在高位地址中,大端模式反之
未对齐的存储器访问:
不是字对齐的访问均为未对齐的存储器访问。
指令的预取:
在前一条指令的执行尚未完成时将指令从存储器中取出,可能最终不被执行,因为:发生异常、发生跳转
预取可能存在的问题:
在存储器中的指令可能在它被预取之后,被执行之前发生改变。如果发生这种情况,对存储器中的指令进行修改一般不能阻止已取消的指令的执行。
Chapter3、处理器模式
ARM 体系结构支持 7 种处理器模式,分别为:用户模式、系统模式、快中断模式、中断模式、管理模式、中止模式、未定义模式。
| 处理器模式 | 说明 | 备注 |
|---|---|---|
| 用户(usr) | 正常程序工作模式 | 不能直接切换到其它模式 |
| 系统(sys) | 用于支持操作系统的特权任务等 | 与用户模式类似,但具有可以直接切换到其它模式等特权,与用户模式共用寄存器,此模式修改寄存器更方便 |
| 快中断(fiq) | 支持高速数据传输及通道处理 | FIQ 异常响应时进入此模式 |
| 中断(irq) | 用于通用中断处理 | IRQ 异常响应时进入此模式 |
| 管理(svc) | 操作系统保护代码 | 系统复位和软件中断响应时进入此模式 |
| 中止(abt) | 用于支持虚拟内存和/或存储器保护 | 在 ARM7TDMI 没有大用处 |
| 未定义(und) | 支持硬件协处理器的软件仿真 | 未定义指令异常响应时进入此模式 |
后六种为特权模式,可以访问一些片内外设和内部寄存器,特权模式下可以自由切换;后五种为异常模式,还可以通过特定的异常进入,都有独立的寄存器。
处理器启动时的模式转换:
管理模式(复位后默认)→多种特权模式(主要设置各模式堆栈)→用户程序运行模式
Chapter4、寄存器组织
ARM 有 37(31+6)个物理寄存器,有 18 个可编程访问的寄存器
31 个通用 32 位寄存器,6 个状态寄存器
18 个可编程访问寄存器中:
- R0-R13 为保存数据或地址值的通用寄存器,不会被指定为特殊用途;
- R0-R7 为未分组寄存器,即对于任何处理器模式,都对应于相同的 32 位物理寄存器
- R8-R14 为分组寄存器,即对应的物理寄存器取决于当前的处理器模式;
- R8-R12 为两个分组的物理寄存器。其中一个特殊用于 FIQ(快中断)模式;
- R13、R14 为 6 个分组的物理寄存器。一个用于用户和系统模式,其余 5 个分别用于 5 种异常模式。
R13 常作为堆栈指针(SP)(只是习惯上这样使用),指向各异常模式专用堆栈;
R14 为链接寄存器(LR)
- 在每种模式下,模式自身的 R14 版本用于保存子程序返回地址;
- 当发生异常时,将 R14 对应的异常模式版本设置为异常返回地址(有些异常有一个小的固定偏移量)。
- 注意要点:当发生异常嵌套时,这些异常之间可能会发生冲突。(保存的地址可能被覆盖)
- 解决办法:R14 的对应版本在发生中断嵌套时不再保存任何有意义的值(将 R14 入栈),或者切换到其它处理器模式下。
R15 为程序计数器(PC),指向正在取指的地址,可以认为是通用寄存器,但是使用受限
- 当前正在执行指令的地址加上 8 个字节(三级流水线);
- 由于 ARM 指令总是以字为单位,所以 R15 寄存器的最低两位总是为 0(4 的倍数);
- 写 R15 值相当于执行一次无条件跳转
CPSR:程序状态寄存器
- 4 个条件代码标志(最高四位):负,零(前两主用于比较),进/借位,溢出(后两者主要用于加减);
- 最低八位(0-7)为控制位,发生异常时被硬件改变或恢复模式下软件改变:
- 2 个中断控制位(IRQ 中断禁止(7)、FIQ 快中断禁止(6));
- 5 个对当前七种处理器模式进行编码的位(最低五位 0-4);
- 1 个指示当前执行指令的工作状态位(ARM/Thumb);
- 保留位(8-27),保留使用,提高程序可移植性。
SPSR:程序状态保存寄存器(异常模式下)
每种异常均有自己对应的 SPSR,保存异常发生之前的 CPSR
Thumb 状态寄存器是 ARM 状态集的子集:
R0-R7, PC(R15), LR(R14), SP(R13), 有条件访问 CPSR
发生异常时,处理器自动进入 ARM 状态;
Chapter5、异常
正常的程序流被暂时中止,处理器就进入异常模式
进入异常:
- 在对应模式的 LR 中保存下一条指令的地址
异常入口为当前指令+8/4(ARM 状态)或当前指令+2/4(Thumb 状态) - 将 CPSR 复制到对应 SPSR 中;
- 强制设置 CPSR 处理器模式位为与异常类型相对应的值;
- 强制 PC 从相关的异常向量取出(进入异常)。
IRQ 和 FIQ 应置位禁止标志,防止不受控制的异常嵌套。
退出异常:
- 将 LR 中的值减去偏移量后存入 PC,偏移量根据异常的类型而有所不同;
- 将 SPSR 的值复制回 CPSR;
- 请零在入口置位的中断禁止标志。
恢复 CPSR 的动作会将 T(状态位)、F 和 I 位(禁止标识)自动恢复为异常发生前的值。
快速中断请求:
对异常的快速响应(得益于八个专用的寄存器),返回时 R14_fiq 减 4;
中断请求:
优先级低于 FIQ,返回时 R14_irq 减 4 存入 PC,SUBS PC,R14_irq,#4;
中止:发生在对存储器的访问不能完成时
- 预取中止——指令预取过程中,但在到达流水线执行阶段才进入异常
- 数据中止——数据访问时
SUBS PC,R14_abt,#8
软件中断指令(SWI):可以进入管理模式
MOVS PC,R14_svc
未定义的指令:遇到无法处理的指令
MOVS PC,R14_und
异常优先级:
| 异常类型 | 优先级 |
|---|---|
| 复位 | 1(最高优先级) |
| 数据中止 | 2 |
| FIQ | 3 |
| IRQ | 4 |
| 预取中止 | 5 |
| 未定义指令 | 6 |
| SWI | 7(最低优先级) |
未定义的指令和 SWI 异常互斥。因为同一条指令不能既是未定义的,又能产生有效的软件中断;
数据中止的优先级必须高于 FIQ 以确保数据转移错误不会被漏过。
当 FIQ 使能,并且 FIQ 和数据中止异常同时发生时:
- ARM 内核进入数据中止处理程序
- 立即跳转到 FIQ 向量。
- 在 FIQ 处理结束后返回到数据中止处理程序。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号