Robust De-noising by Kernel PCA
引
这篇文章是基于对Kernel PCA and De-Noisingin Feature Spaces的一个改进。
针对高斯核:
我们希望最小化下式(以找到\(x\)的一个近似的原像):
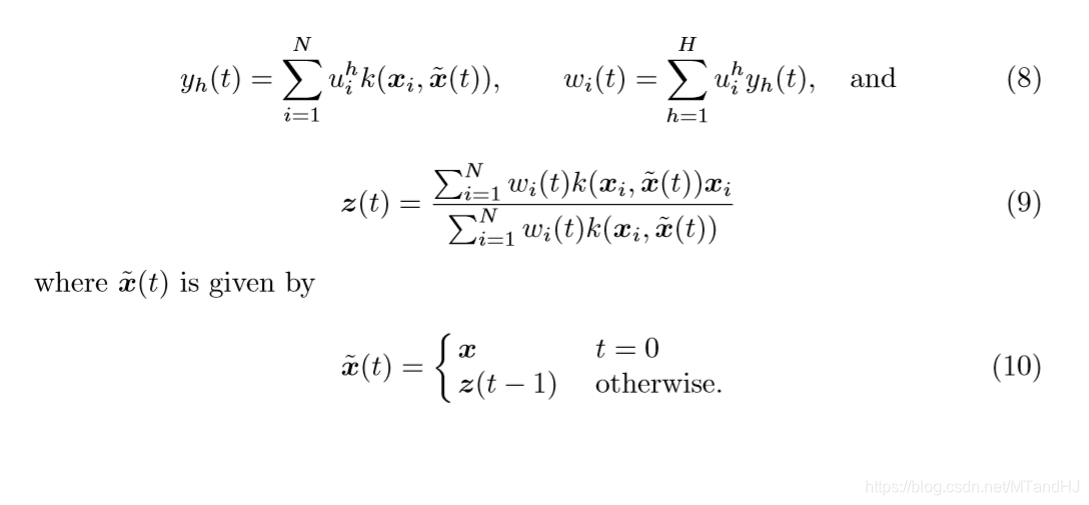
获得了一个迭代公式:
其中\(w_i=\sum_{h=1}^Hy_h u_i^h\),\(u\)通过求解kernel PCA获得(通常是用\(\alpha\)表示的),\(z(0)=x\)。
主要内容
虽然我们可以通过撇去小特征值对应的方向,但是这对于去噪并不足够。Kernel PCA and De-Noisingin Feature Spaces中所提到的方法,也就是上面的那个迭代的公式,也没有很好地解决这个问题。既然\(\{y_h\}\)并没有改变——也就是说,我们可能一直在试图用带噪声的数据去恢复一个不带噪声的数据。
所以,作者论文,在迭代更新过程中,\(y_h\)也应该进行更新。
这样,每一步我们都可以看作是在寻找:
的最小值。
从\((10)\)可以发现,除非\(\widetilde{x}(t)=z(t-1)\)是\(x\)的一个比较好的估计,否则,通过这种方式很有可能会失败(这里的失败定义为,最后的结果与\(x\)差距甚远)。这种情况我估计是很容易发生的。所以,作者提出了一种新的,更新\(\widetilde{x}(t)\)的公式:

其中\(B(t)\)为确定度,是一个\(M \times M\)的矩阵,定义为:
对角线元素,反映了\(x_j\)和\(z_j(t-1)\)的差距,如果二者差距不大,说明\(P_H(x)\)和\(x\)的差距不大,\(x\)不是异常值点,所以,结果和\(x\)的差距也不会太大,否则\(x\)会被判定为一个异常值点,自然\(z\)应该和\(x\)的差别大一点。
\(\sigma_j\)的估计是根据另一篇论文来的,这里只给出估计的公式:

\(\mathrm{med}(x)\)表示\(x\)的中位数,\(\varepsilon_{ij}\)表示第\(i\)个训练样本第\(j\)个分量与其重构之间平方误差。话说,这个重构如何获得呢?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号