[强化学习论文笔记(8)]:DDPG
CONTINUOUS CONTROL WITH DEEP REINFORCEMENT LEARNING
论文地址
笔记
出发点:
DQN的成功让人么意识到非线性的神经网络可以很好的拟合value function(过去认为是不可行的).
于是David Silver把自己过去的DPG 拿出来用神经网络修改了一番就成了DeepDPG.
文章总结DQN的成功原因:
- off-policy, sample from a replay buffer to minimize correlations between samples.
- 使用了target Q-network.
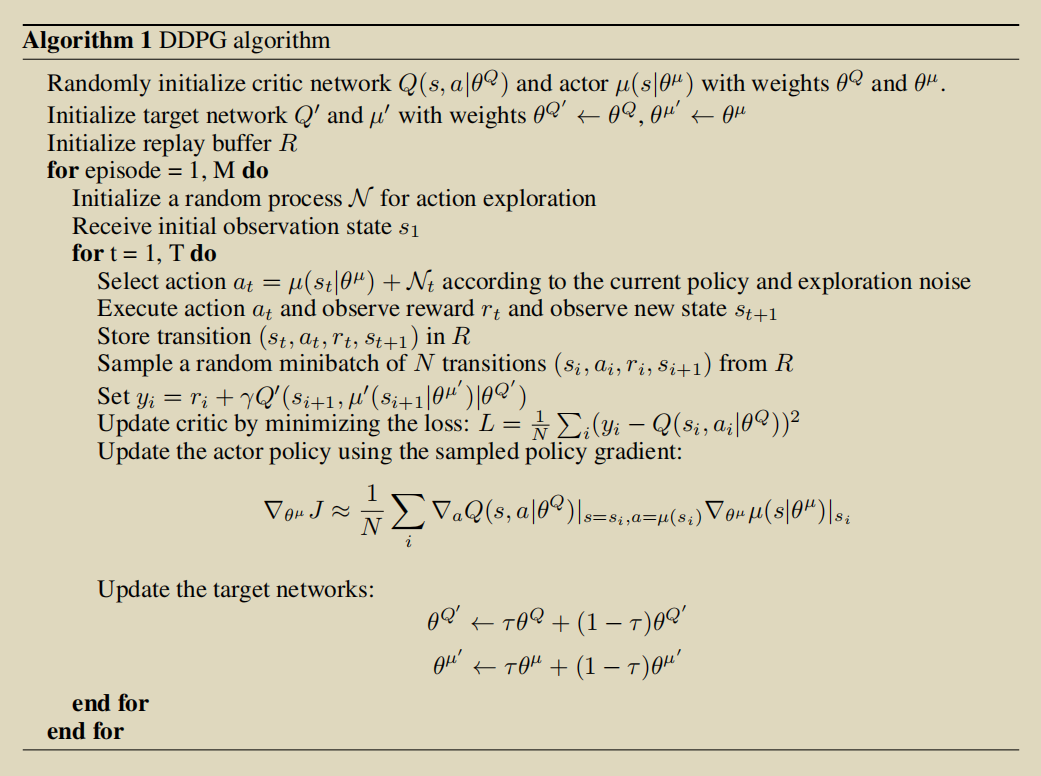
注意点:
- DDPG behavior policy 是\(\mu(s_t|\theta^mu)+N_t\),(确定性策略加噪声).
- 用了replay buffer.
- target network 是soft update的.
DDPG很适合高维连续动作空间.
在Atrai上DDPG比DQN需要的样本少.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号