FREERTOS——移植
1、源码获取
freeRTOS官网: https://www.freertos.org/zh-cn-cmn-s

得到的代码展示:
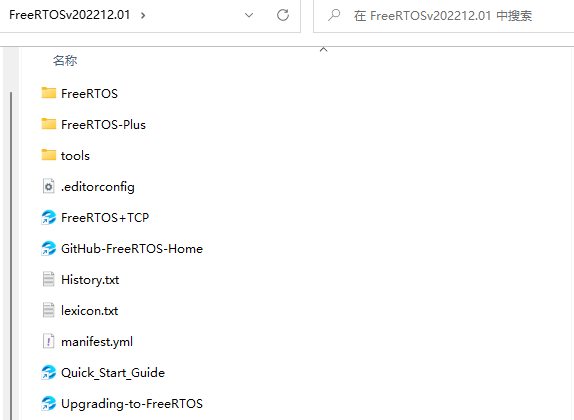
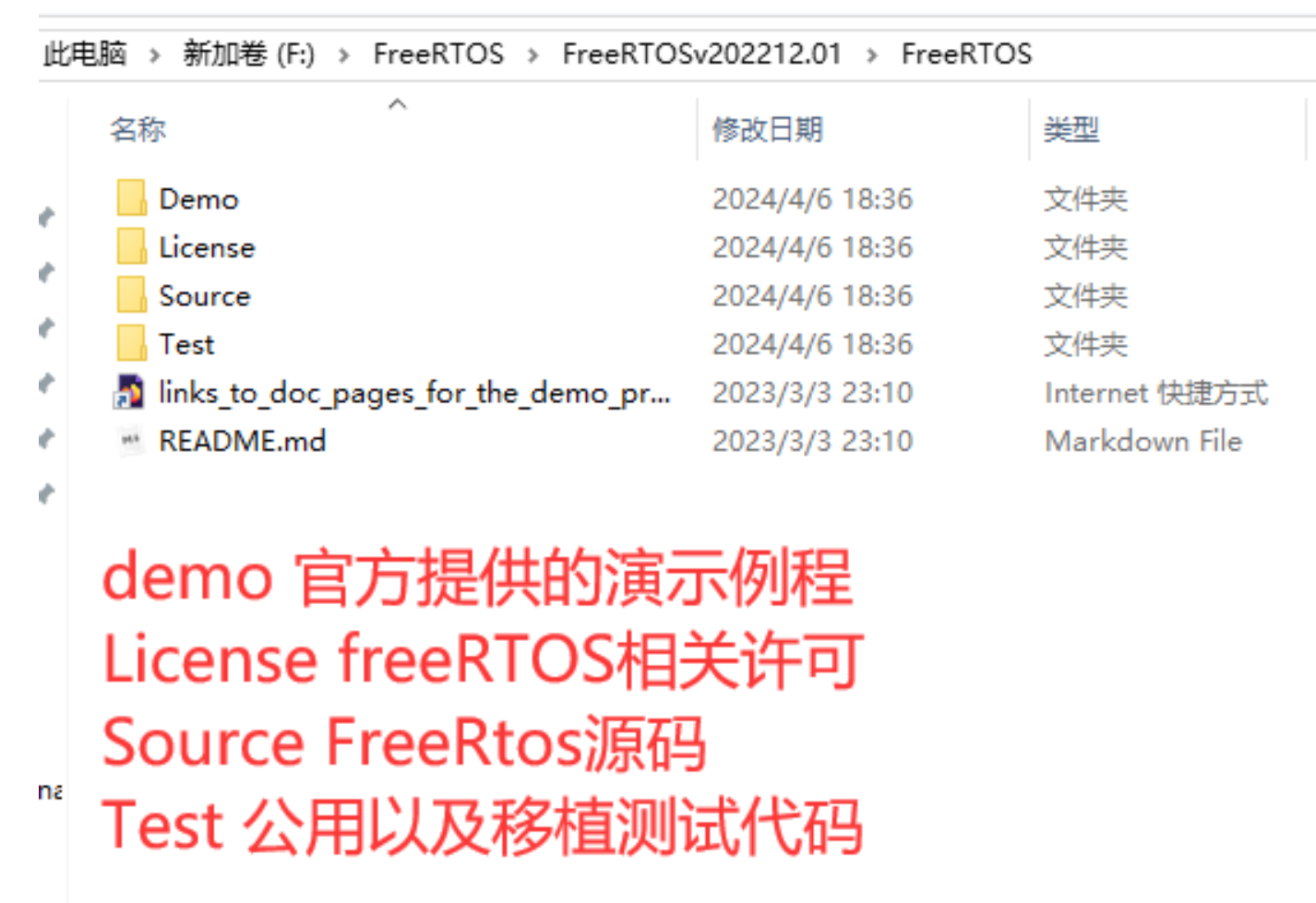
打开FreeRTOS的内核:
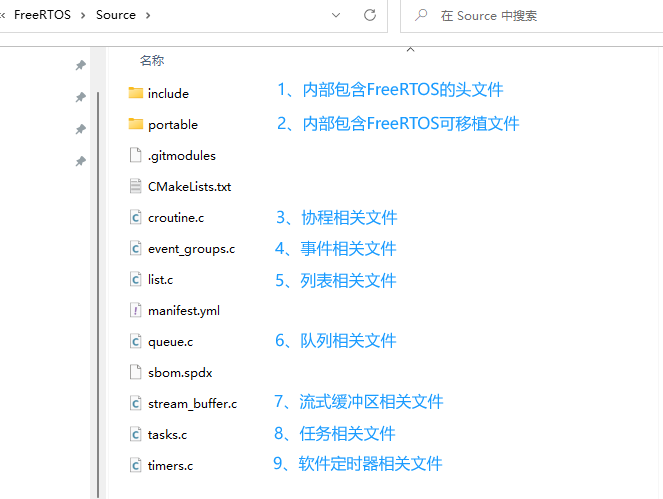
打开FreeRTOS的资源文件:
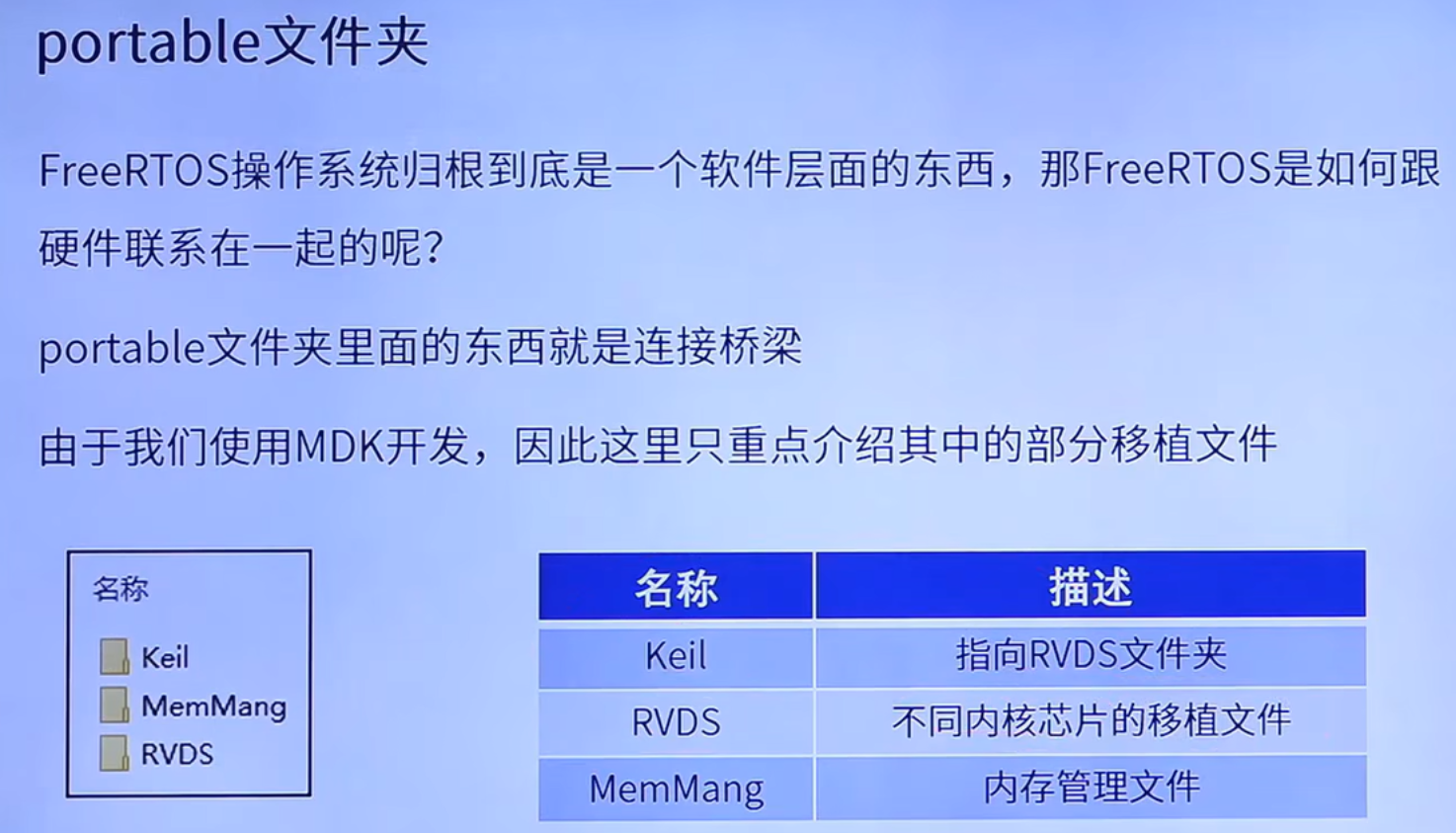
打开portable文件夹:该文件夹是硬件和FreeRTOS连接的桥梁:
2、移植FreeRTOS源码
2.1 添加FreeRTOS源码,将FreeRTOS源码添加到基础工程
在工程中新建个文件夹
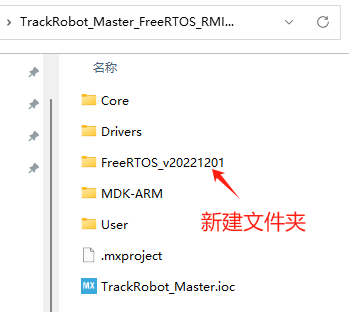
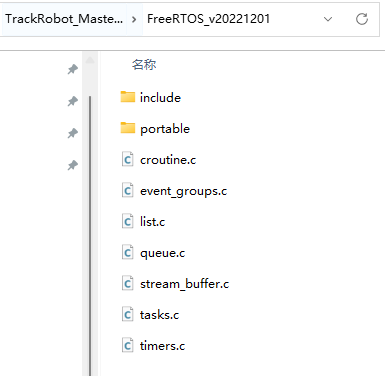
把FreeRTOS的资源文件里面部分内容copy到新建的文件夹中。
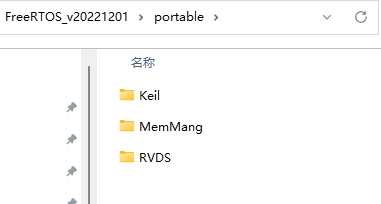
在 portable 文件夹,我们只需要copy keil、MemMang 和 RVDS这三个文件夹。
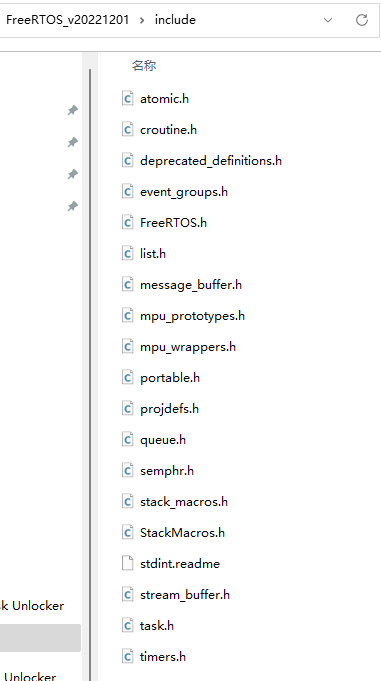
把include 文件夹,把所有头文件都copy 进去。
2.2 打开程序工程,新建分组 FreeRTOS_CORE 和 FreeRTOS_PORTABLE,然后向这两个分组中添加文件

2.3 添加完 FreeRTOS 源码中的 C 文件以后还要添加 FreeRTOS 源码的头文件路径,头文件路
![]()
3. 添加FreeRTOSConfig.h头文件
#ifndef FREERTOS_CONFIG_H #define FREERTOS_CONFIG_H #include <stdio.h> #if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__) #include <stdint.h> extern uint32_t SystemCoreClock; #endif /***************************************************************************************************************/ /* 断言 */ /***************************************************************************************************************/ /* 断言 */ #ifdef DEBUG #define FREERTOS_PRINTF printf #else #define FREERTOS_PRINTF(format, ...) #endif #define vAssertCalled(char,int) FREERTOS_PRINTF("Error:%s,%d\r\n",char,int) #define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__) /***************************************************************************************************************/ /* FreeRTOS基础配置配置选项 */ /***************************************************************************************************************/ /* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片) * * 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。 * 协作式操作系统是任务主动释放CPU后,切换到下一个任务。 * 任务切换的时机完全取决于正在运行的任务。 */ #define configUSE_PREEMPTION 1 /* 1使能时间片调度(默认式使能的) */ #define configUSE_TIME_SLICING 1 /* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务: * 通用方法和特定于硬件的方法(以下简称“特殊方法”)。 * * 通用方法: * 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。 * 2.可以用于所有FreeRTOS支持的硬件 * 3.完全用C实现,效率略低于特殊方法。 * 4.不强制要求限制最大可用优先级数目 * 特殊方法: * 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。 * 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。 * 3.比通用方法更高效 * 4.一般强制限定最大可用优先级数目为32 * 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0! */ #define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 /* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行 * 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决 * * 下载方法: * 1.将开发版正常连接好 * 2.按住复位按键,点击下载瞬间松开复位按键 * * 1.通过跳线帽将 BOOT 0 接高电平(3.3V) * 2.重新上电,下载 * * 1.使用FlyMcu擦除一下芯片,然后进行下载 * STMISP -> 清除芯片(z) */ #define configUSE_TICKLESS_IDLE 0 /* * 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk * Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz, * 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期; */ #define configCPU_CLOCK_HZ (SystemCoreClock) /* 时钟节拍频率,这里设置为1000,周期就是1ms */ #define configTICK_RATE_HZ ( ( TickType_t ) 1000 ) /* 可使用的最大优先级 */ #define configMAX_PRIORITIES (32) /* 空闲任务使用的堆栈大小 */ #define configMINIMAL_STACK_SIZE ((unsigned short)128) /* 任务名字字符串长度 */ #define configMAX_TASK_NAME_LEN (16) /* 系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形 */ #define configUSE_16_BIT_TICKS 0 /* 为1时空闲任务放弃CPU使用权给其他同优先级的用户任务 */ #define configIDLE_SHOULD_YIELD 1 /* 为1时开启任务通知功能,默认开启 */ #define configUSE_TASK_NOTIFICATIONS 1 /* 定义任务通知数组的大小, 默认: 1 */ #define configTASK_NOTIFICATION_ARRAY_ENTRIES 1 /* 为1时使用互斥信号量 */ #define configUSE_MUTEXES 1 /* 为1时使用递归互斥信号量 */ #define configUSE_RECURSIVE_MUTEXES 1 /* 为1时使用计数信号量 */ #define configUSE_COUNTING_SEMAPHORES 1 /* 不为0时表示启用队列记录,具体的值是可以记录的队列和信号量最大数目。 */ #define configQUEUE_REGISTRY_SIZE 8 /* 为1时启用队列 */ #define configUSE_QUEUE_SETS 1 /* 1: 任务创建时分配Newlib的重入结构体, 默认: 0 */ #define configUSE_NEWLIB_REENTRANT 0 /* 1: 使能兼容老版本, 默认: 1 */ #define configENABLE_BACKWARD_COMPATIBILITY 0 /* 定义线程本地存储指针的个数, 默认: 0 */ #define configNUM_THREAD_LOCAL_STORAGE_POINTERS 0 /* */ #define configUSE_APPLICATION_TASK_TAG 0 // /* 定义任务堆栈深度的数据类型, 默认: uint16_t */ #define configSTACK_DEPTH_TYPE uint16_t /* 定义消息缓冲区中每条消息的长度, 默认: size_t */ #define configMESSAGE_BUFFER_LENGTH_TYPE size_t /***************************************************************************************************************/ /* FreeRTOS与内存申请有关配置选项 */ /***************************************************************************************************************/ /* 支持动态内存申请 */ #define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 支持静态内存 */ #define configSUPPORT_STATIC_ALLOCATION 0 /* 系统所有总的堆大小 */ #define configTOTAL_HEAP_SIZE ((size_t)(32*1024)) /* 1: 用户手动分配FreeRTOS内存堆(ucHeap), 默认: 0 */ #define configAPPLICATION_ALLOCATED_HEAP 0 /* 1: 用户自行实现任务创建时使用的内存申请与释放函数, 默认: 0 */ #define configSTACK_ALLOCATION_FROM_SEPARATE_HEAP 0 /***************************************************************************************************************/ /* FreeRTOS与钩子函数有关的配置选项 */ /***************************************************************************************************************/ /* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子 * * 空闲任务钩子是一个函数,这个函数由用户来实现, * FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ), * 这个函数在每个空闲任务周期都会被调用 * 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。 * 因此必须保证空闲任务可以被CPU执行 * 使用空闲钩子函数设置CPU进入省电模式是很常见的 * 不可以调用会引起空闲任务阻塞的API函数 */ #define configUSE_IDLE_HOOK 1 /* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子 * * 时间片钩子是一个函数,这个函数由用户来实现, * FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void ) * 时间片中断可以周期性的调用 * 函数必须非常短小,不能大量使用堆栈, * 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数 */ /*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/ #define configUSE_TICK_HOOK 0 /* 使用内存申请失败钩子函数 */ #define configUSE_MALLOC_FAILED_HOOK 0 /* 大于0时启用堆栈溢出检测功能,如果使用此功能 * 用户必须提供一个栈溢出钩子函数,如果使用的话 * 此值可以为1或者2,因为有两种栈溢出检测方法 */ #define configCHECK_FOR_STACK_OVERFLOW 0 /* 1: 使能定时器服务任务首次执行前的钩子函数, 默认: 0 */ #define configUSE_DAEMON_TASK_STARTUP_HOOK 0 /***************************************************************************************************************/ /* FreeRTOS与运行时间和任务状态收集有关的配置选项 */ /***************************************************************************************************************/ /* 为1时启用运行时间统计功能 */ #define configGENERATE_RUN_TIME_STATS 0 #if configGENERATE_RUN_TIME_STATS /* 定时器3提供时间统计的时基,频率为10K,即周期为100us */ #define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ConfigureTimeForRunTimeStats() /* 获取时间统计时间值 */ extern uint32_t FreeRTOSRunTimeTicks; #define portGET_RUN_TIME_COUNTER_VALUE() FreeRTOSRunTimeTicks #endif /* 为1启用可视化跟踪调试 */ #define configUSE_TRACE_FACILITY 0 /* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数 * prvWriteNameToBuffer() * vTaskList(), * vTaskGetRunTimeStats() */ #define configUSE_STATS_FORMATTING_FUNCTIONS 0 /***************************************************************************************************************/ /* FreeRTOS与协程有关的配置选项 */ /***************************************************************************************************************/ /* 为1时启用协程,启用协程以后必须添加文件croutine.c */ #define configUSE_CO_ROUTINES 0 /* 定义协程的最大优先级, 最大优先级=configMAX_CO_ROUTINE_PRIORITIES-1, 无默认configUSE_CO_ROUTINES为1时需定义 */ #define configMAX_CO_ROUTINE_PRIORITIES ( 2 ) /***************************************************************************************************************/ /* FreeRTOS与软件定时器有关的配置选项 */ /***************************************************************************************************************/ /* 为1时启用软件定时器 */ #define configUSE_TIMERS 0 /* 软件定时器优先级 */ #define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1) /* 软件定时器队列长度 */ #define configTIMER_QUEUE_LENGTH 5 /* 软件定时器任务堆栈大小 */ #define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2) /***************************************************************************************************************/ /* FreeRTOS可选函数配置选项 */ /***************************************************************************************************************/ /* 获取任务调度器状态 */ #define INCLUDE_xTaskGetSchedulerState 1 /* 设置任务优先级 */ #define INCLUDE_vTaskPrioritySet 1 /* 获取任务优先级 */ #define INCLUDE_uxTaskPriorityGet 1 /* 删除任务 */ #define INCLUDE_vTaskDelete 1 /* */ #define INCLUDE_vTaskCleanUpResources 1 /* 挂起任务 */ #define INCLUDE_vTaskSuspend 1 /* 任务绝对延时 */ #define INCLUDE_vTaskDelayUntil 1 /* 任务延时 */ #define INCLUDE_vTaskDelay 1 /* 获取任务状态 */ #define INCLUDE_eTaskGetState 1 /* 将函数的执行挂到定时器服务任务 */ #define INCLUDE_xTimerPendFunctionCall 0 /* 获取任务堆栈历史剩余最小值 */ #define INCLUDE_uxTaskGetStackHighWaterMark 1 /* 获取空闲任务的任务句柄 */ #define INCLUDE_xTaskGetIdleTaskHandle 1 /* 中断任务延时 */ #define INCLUDE_xTaskAbortDelay 1 /* 通过任务名获取任务句柄 */ #define INCLUDE_xTaskGetHandle 1 /* 恢复在中断中挂起的任务 */ #define INCLUDE_xTaskResumeFromISR 1 /* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */ #if ( configUSE_TRACE_FACILITY == 1 ) #include "trcRecorder.h" /* 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)*/ /* 获取当前任务的任务句柄 */ #define INCLUDE_xTaskGetCurrentTaskHandle 1 #else /* 获取当前任务的任务句柄 */ #define INCLUDE_xTaskGetCurrentTaskHandle 1 #endif /* 恢复在中断中挂起的任务 */ //#define INCLUDE_xResumeFromISR 1 /* 在中断中设置事件标志位 */ //#define INCLUDE_xEventGroupSetBitFromISR 1 /***************************************************************************************************************/ /* FreeRTOS与中断有关的配置选项 */ /***************************************************************************************************************/ #ifdef __NVIC_PRIO_BITS #define configPRIO_BITS __NVIC_PRIO_BITS #else #define configPRIO_BITS 4 #endif /* 中断最低优先级 */ #define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 /* 系统可管理的最高中断优先级 */ #define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 /* */ #define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* */ #define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 无作用? */ //#define configMAX_API_CALL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY /* This is the value being used as per the ST library which permits 16 priority values, 0 to 15. This must correspond to the configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest NVIC value of 255. */ //#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15 /***************************************************************************************************************/ /* FreeRTOS与中断服务函数有关的配置选项 */ /***************************************************************************************************************/ #define xPortPendSVHandler PendSV_Handler #define vPortSVCHandler SVC_Handler /***************************************************************************************************************/ /* FreeRTOS MPU 特殊定义 */ /***************************************************************************************************************/ //#define configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS 0 //#define configTOTAL_MPU_REGIONS 8 //#define configTEX_S_C_B_FLASH 0x07UL //#define configTEX_S_C_B_SRAM 0x07UL //#define configENFORCE_SYSTEM_CALLS_FROM_KERNEL_ONLY 1 //#define configALLOW_UNPRIVILEGED_CRITICAL_SECTIONS 1 /***************************************************************************************************************/ /* ARMv8-M 安全侧端口相关定义。 */ /***************************************************************************************************************/ //#define secureconfigMAX_SECURE_CONTEXTS 5 #endif /* FREERTOS_CONFIG_H */
4. 修改中断函数
1. 注销SVC_Handler和PendSV_Handler两个函数。
2. 修改SysTick_Handler函数
#include "FreeRTOS.h" #include "task.h" /** * @brief This function handles System tick timer. */ void SysTick_Handler(void) { /* USER CODE BEGIN SysTick_IRQn 0 */ #if (INCLUDE_xTaskGetSchedulerState == 1 ) if( xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED ) {//系统已经运行 #endif /* INCLUDE_xTaskGetSchedulerState */ extern void xPortSysTickHandler(void); xPortSysTickHandler(); #if (INCLUDE_xTaskGetSchedulerState == 1 ) } #endif /* INCLUDE_xTaskGetSchedulerState */ /* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); /* USER CODE BEGIN SysTick_IRQn 1 */ /* USER CODE END SysTick_IRQn 1 */ }
5.添加启动任务创建文件
/* Includes ------------------------------------------------------------------*/ #include "components.h" // #include "FreeRTOS.h" #include "task.h" // #include "bsp.h" /* Private macros ------------------------------------------------------------*/ /*******任务优先级******/ #define MAIN_TASK_PRIORITY (configMAX_PRIORITIES-1) /*******任务堆栈大小******/ #define MAIN_TASK_STACK_SIZE 512 /* Private types -------------------------------------------------------------*/ /* Private constants ---------------------------------------------------------*/ /* Private variables ---------------------------------------------------------*/ /*任务句柄*/ TaskHandle_t MainTask_Handler = NULL; #if configSUPPORT_STATIC_ALLOCATION /* 空闲任务任务堆栈 */ static StackType_t Idle_Task_Stack[configMINIMAL_STACK_SIZE]; /* 定时器任务堆栈 */ static StackType_t Timer_Task_Stack[configTIMER_TASK_STACK_DEPTH]; /* 空闲任务控制块 */ static StaticTask_t Idle_Task_TCB; /* 定时器任务控制块 */ static StaticTask_t Timer_Task_TCB; /* MainTask任务任务堆栈 */ static StackType_t MainTask_Stack[128]; /* MainTask 任务控制块 */ static StaticTask_t MainTask_TCB; #endif /* Private functions ---------------------------------------------------------*/ /* Exported macros -----------------------------------------------------------*/ /* Exported types ------------------------------------------------------------*/ /* Exported constants --------------------------------------------------------*/ /* Exported variables --------------------------------------------------------*/ /* Exported functions --------------------------------------------------------*/ extern void SystemClock_Config(void); /*********************************************************************************************** 硬件配置函数 ************************************************************************************************/ #if configSUPPORT_STATIC_ALLOCATION /** ********************************************************************** * @brief 获取空闲任务的任务堆栈和任务控制块内存 * ppxTimerTaskTCBBuffer : 任务控制块内存 * ppxTimerTaskStackBuffer : 任务堆栈内存 * pulTimerTaskStackSize : 任务堆栈大小 * @author fire * @version V1.0 * @date 2018-xx-xx ********************************************************************** */ void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize) { *ppxIdleTaskTCBBuffer=&Idle_Task_TCB;/* 任务控制块内存 */ *ppxIdleTaskStackBuffer=Idle_Task_Stack;/* 任务堆栈内存 */ *pulIdleTaskStackSize=configMINIMAL_STACK_SIZE;/* 任务堆栈大小 */ } /** ********************************************************************* * @brief 获取定时器任务的任务堆栈和任务控制块内存 * ppxTimerTaskTCBBuffer : 任务控制块内存 * ppxTimerTaskStackBuffer : 任务堆栈内存 * pulTimerTaskStackSize : 任务堆栈大小 * @author fire * @version V1.0 * @date 2018-xx-xx ********************************************************************** */ void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize) { *ppxTimerTaskTCBBuffer=&Timer_Task_TCB;/* 任务控制块内存 */ *ppxTimerTaskStackBuffer=Timer_Task_Stack;/* 任务堆栈内存 */ *pulTimerTaskStackSize=configTIMER_TASK_STACK_DEPTH;/* 任务堆栈大小 */ } #endif /*********************************************************************************************** 应用任务函数 ************************************************************************************************/ /* 开始任务任务函数 */ void main_thread_entry(void *pvParameters) { extern int main(void); extern int $Super$$main(void); taskENTER_CRITICAL(); /*进入临界区*/ /***************创建任务***************/ /* invoke system main function */ #if defined(__CC_ARM) || defined(__CLANG_ARM) $Super$$main(); /* for ARMCC. */ #elif defined(__ICCARM__) || defined(__GNUC__) main(); #endif /*************删除开始任务*************/ vTaskDelete(NULL); taskEXIT_CRITICAL(); /*退出临界区*/ } /*********************************************************************************************** 应用主函数 ************************************************************************************************/ void FreeRtos_hw_board_init(void) { HAL_Init(); /* Configure the system clock */ SystemClock_Config(); /* 硬件BSP初始化统统放在这里,比如LED、串口、LCD等 */ BSP_Init(); #ifdef HARDWARE_TEST /* 测试硬件是否正常工作 */ #endif } void FreeRtos_application_init(void) { #if configSUPPORT_STATIC_ALLOCATION /* 创建 AppTaskCreate 任务 */ MainTask_Handler = xTaskCreateStatic((TaskFunction_t )main_thread_entry, //任务函数 (const char* )"main", //任务名称 (uint32_t )MAIN_TASK_STACK_SIZE, //任务堆栈大小 (void* )NULL, //传递给任务函数的参数 (UBaseType_t )MAIN_TASK_PRIORITY, //任务优先级 (StackType_t* )MainTask_Stack, //任务堆栈 (StaticTask_t* )&MainTask_TCB); //任务控制块 #else xTaskCreate((TaskFunction_t )main_thread_entry, /*任务函数*/ (const char* )"main", /*任务名称*/ (uint16_t )MAIN_TASK_STACK_SIZE, /*任务堆栈大小*/ (void* )NULL, /*传递给任务函数的参数*/ (UBaseType_t )MAIN_TASK_PRIORITY, /*任务优先级*/ (TaskHandle_t* )&MainTask_Handler); /*任务句柄*/ #endif } int FreeRtos_startup(void) { taskENTER_CRITICAL(); /*进入临界区*/ /* board level initialization * NOTE: please initialize heap inside board initialization. */ FreeRtos_hw_board_init(); /* create init_thread */ FreeRtos_application_init(); /* start scheduler */ if(NULL != MainTask_Handler)/* 创建成功 */ vTaskStartScheduler();/* 启动任务,开启调度 */ /* never reach here */ return 0; } #if defined(__CC_ARM) || defined(__CLANG_ARM) extern int $Super$$main(void); /* re-define main function */ int $Sub$$main(void) { FreeRtos_startup(); return 0; } #elif defined(__ICCARM__) extern int main(void); /* __low_level_init will auto called by IAR cstartup */ extern void __iar_data_init3(void); int __low_level_init(void) { // call IAR table copy function. __iar_data_init3(); FreeRtos_startup(); return 0; } #elif defined(__GNUC__) extern int main(void); /* Add -eentry to arm-none-eabi-gcc argument */ int entry(void) { FreeRtos_startup(); return 0; } #endif
6. 修改main.c文件
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2024 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ #include "main.h" #include "bsp.h" #if (SYS_SUPPORT_OS == 0) /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "can.h" #include "dma.h" #include "eth.h" #include "iwdg.h" #include "rtc.h" #include "spi.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #else #include "mydata.h" #include "Task_LED.h" #endif /* USER CODE END Includes */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ #if ( SYS_SUPPORT_OS == 0 ) /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_CAN1_Init(); MX_CAN2_Init(); MX_IWDG_Init(); MX_RTC_Init(); MX_SPI3_Init(); MX_USART1_UART_Init(); MX_USART3_UART_Init(); MX_USART6_UART_Init(); MX_ETH_Init(); /* USER CODE BEGIN 2 */ #endif /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ #if 1 AppData_Init(); RTOS_Components_Init(); Task_LED_create(); #else while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } #endif /* USER CODE END 3 */ }
7.添加测试任务(Task_LED)
/* Includes ------------------------------------------------------------------*/ #include "Task_LED.h" /* FreeRTOS头文件 */ #include "FreeRTOS.h" #include "task.h" /* */ #include "bsp.h" /* Private macros ------------------------------------------------------------*/ #if ( configUSE_IDLE_HOOK == 0 ) /*******任务优先级******/ #define LED_TASK_PRIO 1 /*******任务堆栈大小******/ #define LED_STK_SIZE 64 /* Private types -------------------------------------------------------------*/ /* Private constants ---------------------------------------------------------*/ /* Private variables ---------------------------------------------------------*/ /* LED任务句柄 */ static TaskHandle_t LED_Task_Handle = NULL;/* LED任务句柄 */ #endif /* Private functions ---------------------------------------------------------*/ /* Exported macros -----------------------------------------------------------*/ /* Exported types ------------------------------------------------------------*/ /* Exported constants --------------------------------------------------------*/ /* Exported variables --------------------------------------------------------*/ /* Exported functions --------------------------------------------------------*/ /*********************************************************************************************** 应用任务函数 ************************************************************************************************/ #if ( configUSE_IDLE_HOOK == 0 ) void led_task(void *pvParameters) #else // 空闲钩子函数 void vApplicationIdleHook( void ) #endif { while(1) { LED2(LED_OFF); HAL_xmsDelay( 179 ); FeedDog(); LED2(LED_ON); HAL_xmsDelay( 19 ); FeedDog(); } } /*********************************************************************************************** 应用主函数 ************************************************************************************************/ void Task_LED_create(void) { #if ( configUSE_IDLE_HOOK == 0 ) BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */ /* 创建LED1_Task任务 */ xReturn = xTaskCreate((TaskFunction_t )led_task, /* 任务入口函数 */ (const char* )"led", /* 任务名字 */ (uint16_t )LED_STK_SIZE, /* 任务栈大小 */ (void* )NULL, /* 任务入口函数参数 */ (UBaseType_t )LED_TASK_PRIO, /* 任务的优先级 */ (TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */ if(pdPASS == xReturn) PRINTF("[D] [RTOS] led_task create succeed!\r\n"); else PRINTF("[D] [RTOS] led_task create failure!\r\n"); #else PRINTF("[D] [RTOS] IdleHook create succeed!\r\n"); #endif }
#ifndef __Task_LED_H__ #define __Task_LED_H__ #ifdef __cplusplus extern "C" { #endif /* __cplusplus */ /* Includes ------------------------------------------------------------------*/ /* Private macros ------------------------------------------------------------*/ /* Private types -------------------------------------------------------------*/ /* Private constants ---------------------------------------------------------*/ /* Private variables ---------------------------------------------------------*/ /* Private functions ---------------------------------------------------------*/ /* Exported macros -----------------------------------------------------------*/ /* Exported types ------------------------------------------------------------*/ /* Exported constants --------------------------------------------------------*/ /* Exported variables --------------------------------------------------------*/ /* Exported functions --------------------------------------------------------*/ void Task_LED_create(void); #ifdef __cplusplus } #endif /* __cplusplus */ #endif // __Task_LED_H__

 浙公网安备 33010602011771号
浙公网安备 33010602011771号