
斜率优化 dp · 学习笔记
动态规划模型
形如这种的线性动态规划叫做 1D/1D 动态规划。
众所周知,当 \(val(i,j)\) 不包含和 \(i,j\) 同时相关的项时,我们可以使用单调队列来优化到均摊 \(O(1)\) 决策。
然而,当 \(val(i,j)\) 包含 \(i,j\) 乘积项时,使用单调队列并不能很好地解决这类问题,于是就引入了斜率优化。
例 AT_dp_z
设走到 \(i\) 的最小花费是 \(f_i\),则有:
朴素 DP,\(O(n^2)\),显然无法通过。
暴力拆开,得:
把与 \(j\) 无关的常量项提出,有:
Step 1 · 判断决策
假设 \(1\leq j_1<j_2\leq n\),且 \(j_1\) 比 \(j_2\) 更优,则有:
参变分离,\(i\) 是参数:
设 \(Y(j)=f_j+h_j^2\),\(X(j)=h_j\),则有:
Step 2 · 确定凸包
我们把一个决策 \(j\) 抽象成一个点 \(P(X(j),Y(j))\)。
设 \(\operatorname{slope}(i,j)=\frac{Y(i)-Y(j)}{X(i)-X(j)}\),也就是 \(i,j\) 两点所连成直线的斜率。
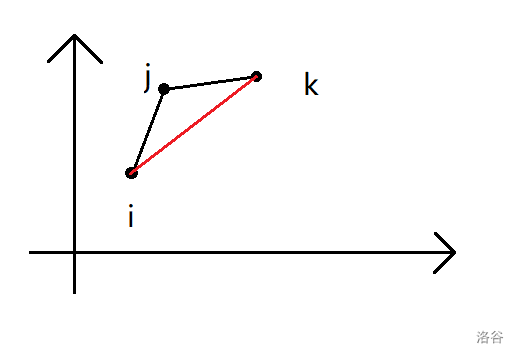
假设有 \(i<j<k\) 三个点,当在给 \(f_p\) 做决策的时候,满足 \(j\) 最优,那么当且仅当 \(i\) 比 \(j\) 劣 且 \(j\) 比 \(k\) 优,用式子表示就是:
合并一下:
因此,如果有 \(i<j<k\) 不满足上式,则 \(j\) 一定不可能是最优决策,也就是说,当 \(i,j,k\) 形如下图时,\(j\) 可以被删除。
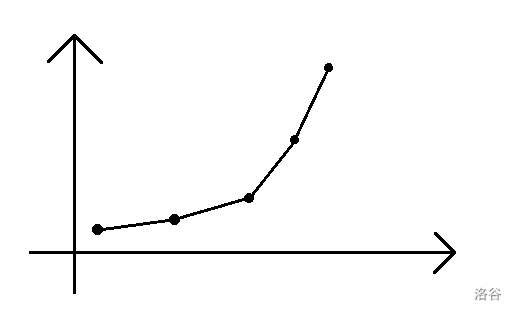
现在我们决策集合中,每一对相邻的 \(i,j\) 都满足上式,最后我们的决策集合长得就像下图一样,我们叫它:凸壳。
Step 3 · 维护凸包
我们要时刻保持决策集合满足这样的条件。假设,对于 \(1\leq j<i\),\(P(j)\) 都已经被维护好了,现在要插入 \(P(i)\)。
因为本题中 \(X(j)\) 也就是 \(2h_i\) 是单调的,所以 \(P(i)\) 是在队尾插入的,所以我们可以使用一个单调队列,这个单调队列里相邻两个决策的斜率值单调递增。当我们插入 \(P(i)\) 时,若 \(P(i)\) 和队尾点构成的斜率值 大于 队尾点和队尾点前面的一个点时,把 \(P(i)\) 插入到队尾。否则一直弹出队尾点,直到满足上述条件。
Step 4 · 总结
看回我们最初的状态方程
我们只要找到最优的 \(j\),就能完成转移。
还是看我们的基本公式:当 \(2h_i\leq\operatorname{slope}(i,j)\) 时,\(i\) 比 \(j\) 优。
因为凸包上斜率单调递增,所以我们可以使用二分来寻找一个最小的 \(k\),使得 \(2h_i\leq\operatorname{slope}(k,k+1)\)。
至此,我们已经可以以 \(O(n\log n)\) 的复杂度通过此题,但是还有优化的空间。
发现算法的瓶颈在二分的过程,考虑使用单调性相关性质。
我们知道 \(2h_i\) 是单调的,所以每次找到的 \(k\) 也是单调的,换句话说,这一次找到了 \(k\),那么以后就不可能找到比 \(k\) 还往前的点。
所以我们可以判断 \(2h_i\leq \operatorname{slope}(1,2)\),如果符合,\(1\) 就是最佳决策点,否则一直弹出队头,直到满足。
此时均摊复杂度 \(O(n)\)。
* 李超线段树解法
看回我们的基本公式:
我们只需要让 \(\min\) 里面的东西最小就行了,令 \(k=-2h_j\),\(b=f_j+h_j^2\),再让 \(g(x)=h_ik+b\),则:
其中 \(g(x)\) 明显是一个一次函数,所以我们可以使用李超线段树来维护每个决策点,每次决策查询最小值即可,时间复杂度 \(O(n \log n)\)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号