通用8位SPI接口模块——verilog实现
本次设计一个八位的SPI的接口模块,可以修改输出的频率,也可以通过修改参数来设置通信模式。
本模块是设定生成一个目标输出频率的二倍的计数器,然后通关计数的值来输出响应的信号,从而进行SPI通信。
本模块既可以发送数据也可以接收数据,给Send_en信号使开始发送数据,在接收到8位数据后会生成Read_en信号。
片选信号只设定了1位,但是可以通过简单的修改位宽来设置多位。
一、模块代码
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer: Lclone
//
// Create Date: 2023/01/23 00:56:52
// Design Name: SPI_Interface
// Module Name: SPI_Interface
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
// SPI接口模块
// 可修改分频参数来生成目标频率,最低分频系数为2;
// 可以置位CPOL、CPHA可以来设置通信模式;
// 本模块只有1位片选信号,但是可以简单修改位宽来设置多位片选信号
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module SPI_Interface
# (
parameter Value_divide = 2)//分频系数(最低为2)
(
//-----------------内部接口------------------
input Clk, //时钟
input Rst_n, //复位信号
input CPOL, //时钟极性
input CPHA, //时钟相位
input CS_input, //片选信号
input Send_en, //发送使能
input [7:0] Data_send, //待发送数据
output reg Read_en, //接收数据读使能
output reg [7:0] Data_recive, //接收到的数据
//------------------外部接口------------------
output reg Spi_clk, //输出时钟端
output reg Spi_mosi, //主输出从接收端
input Spi_miso, //主接收从输出端
output Cs_output //片选信号输出
);
reg act_flag; //活动标志寄存器
reg [9:0] cnt_divide; //分频计数器
reg [7:0] Data_send_reg; //待发送数据寄存器
reg [4:0] cnt_pulse; //脉冲计数器
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
act_flag <= 0;
else if(Send_en == 1)
act_flag <= 1;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
act_flag <= 0;
else
act_flag <= act_flag;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Read_en <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
Read_en <= 1;
else
Read_en <= 0;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Data_send_reg <= 0;
else if(Send_en == 1)
Data_send_reg <= Data_send;
else
Data_send_reg <= Data_send_reg;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
cnt_divide <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
cnt_divide <= 0;
else if(act_flag == 1)
cnt_divide <= cnt_divide + 1'b1;
else
cnt_divide <= 0;
end
always @(posedge Clk or negedge Rst_n) begin//生成目标时钟两倍频率的的cnt_pulse
if(Rst_n == 0)
cnt_pulse <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1 & cnt_pulse == 16)
cnt_pulse <= 0;
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
cnt_pulse <= cnt_pulse + 1'b1;
else if(act_flag == 1)
cnt_pulse <= cnt_pulse;
else
cnt_pulse <= 0;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
begin
if(CPOL == 1)
begin
Spi_clk <= 1;
Spi_mosi <= 1;
Data_recive <= 0;
end
else
begin
Spi_clk <= 0;
Spi_mosi <= 1;
Data_recive <= 0;
end
end
else if(cnt_divide == Value_divide/2 - 1 & act_flag == 1)
begin
if(CPHA == 0)
case(cnt_pulse)
0:begin
Spi_clk <= Spi_clk;
Spi_mosi <= Data_send_reg[7];
Data_recive <= Data_recive;
end
1:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[7] <= Spi_miso;
end
2:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[6];
Data_recive <= Data_recive;
end
3:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[6] <= Spi_miso;
end
4:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[5];
Data_recive <= Data_recive;
end
5:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[5] <= Spi_miso;
end
6:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[4];
Data_recive <= Data_recive;
end
7:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[4] <= Spi_miso;
end
8:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[3];
Data_recive <= Data_recive;
end
9:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[3] <= Spi_miso;
end
10:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[2];
Data_recive <= Data_recive;
end
11:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[2] <= Spi_miso;
end
12:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[1];
Data_recive <= Data_recive;
end
13:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[1] <= Spi_miso;
end
14:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[0];
Data_recive <= Data_recive;
end
15:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[0] <= Spi_miso;
end
16:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= 1;
Data_recive <= Data_recive;
end
default:;
endcase
else
case(cnt_pulse)
0:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[7];
Data_recive <= Data_recive;
end
1:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[7] <= Spi_miso;
end
2:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[6];
Data_recive <= Data_recive;
end
3:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[6] <= Spi_miso;
end
4:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[5];
Data_recive <= Data_recive;
end
5:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[5] <= Spi_miso;
end
6:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[4];
Data_recive <= Data_recive;
end
7:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[4] <= Spi_miso;
end
8:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[3];
Data_recive <= Data_recive;
end
9:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[3] <= Spi_miso;
end
10:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[2];
Data_recive <= Data_recive;
end
11:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[2] <= Spi_miso;
end
12:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[1];
Data_recive <= Data_recive;
end
13:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[1] <= Spi_miso;
end
14:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Data_send_reg[0];
Data_recive <= Data_recive;
end
15:begin
Spi_clk <= ~Spi_clk;
Spi_mosi <= Spi_mosi;
Data_recive[0] <= Spi_miso;
end
16:begin
Spi_clk <= Spi_clk;
Spi_mosi <= 1;
Data_recive <= Data_recive;
end
default:;
endcase
end
end
assign Cs_output = CS_input;
endmodule
二、仿真
1、仿真激励
`timescale 1ns / 1ps
module SPI_tb();
reg clk_50m;
initial clk_50m <= 1;
always #10 clk_50m <= ~clk_50m;
reg rst_n;
initial begin
rst_n <= 0;
#200
rst_n <= 1;
end
reg Send_en;
reg [7:0]Data_send;
wire Read_en;
wire [7:0]Data_recive;
wire Spi_clk;
wire Spi_mosi;
wire Spi_miso;
wire Cs_output;
SPI_Interface
# (
.Value_divide (4))
SPI_inst
(
//-----------------内部接口------------------
.Clk (clk_50m),
.Rst_n (rst_n),
.CPOL (1),
.CPHA (0),
.CS_input (1),
.Send_en (Send_en),
.Data_send (Data_send),
.Read_en (Read_en),
.Data_recive (Data_recive),
//------------------外部接口------------------
.Spi_clk (Spi_clk),
.Spi_mosi (Spi_mosi),
.Spi_miso (Spi_miso),
.Cs_output (Cs_output)
);
assign Spi_miso = Spi_mosi;
initial begin
Send_en <= 0;
Data_send <= 0;
#400;
Send_en <= 1;
Data_send <= 8'haf;
#20
Send_en <= 0;
#800;
Send_en <= 1;
Data_send <= 8'h55;
#20
Send_en <= 0;
end
endmodule
2、仿真结果
两倍分频:
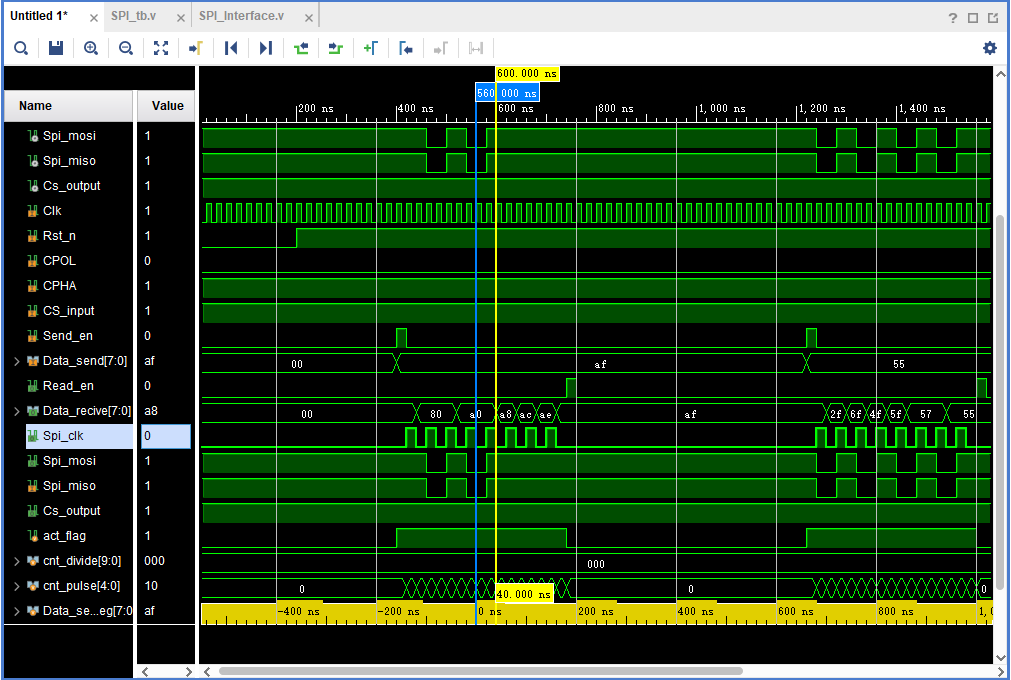
四倍分频:
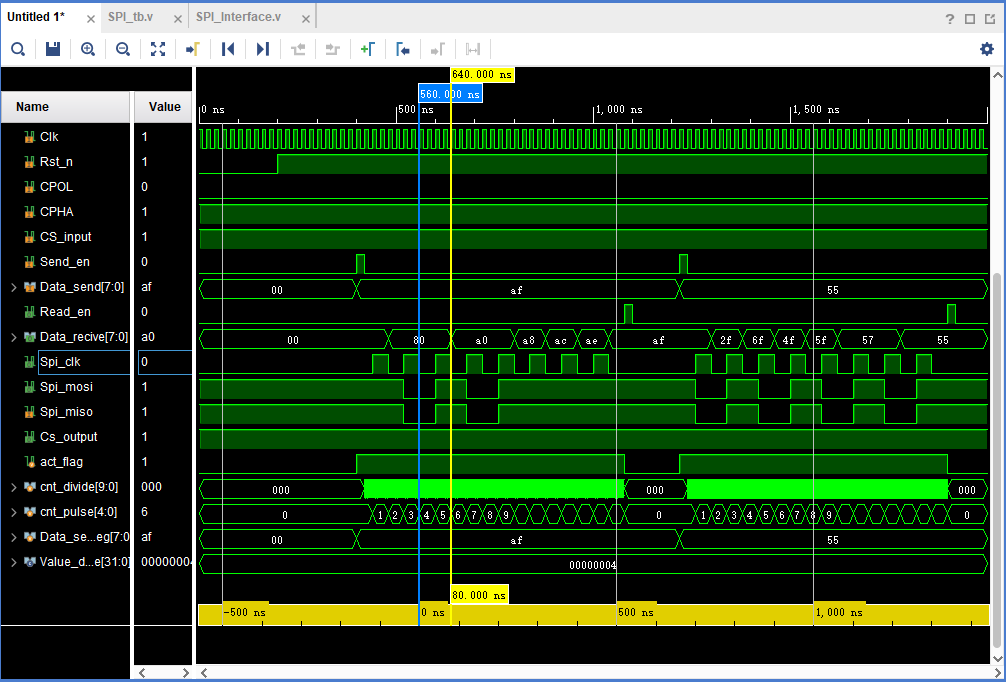
八倍分频:
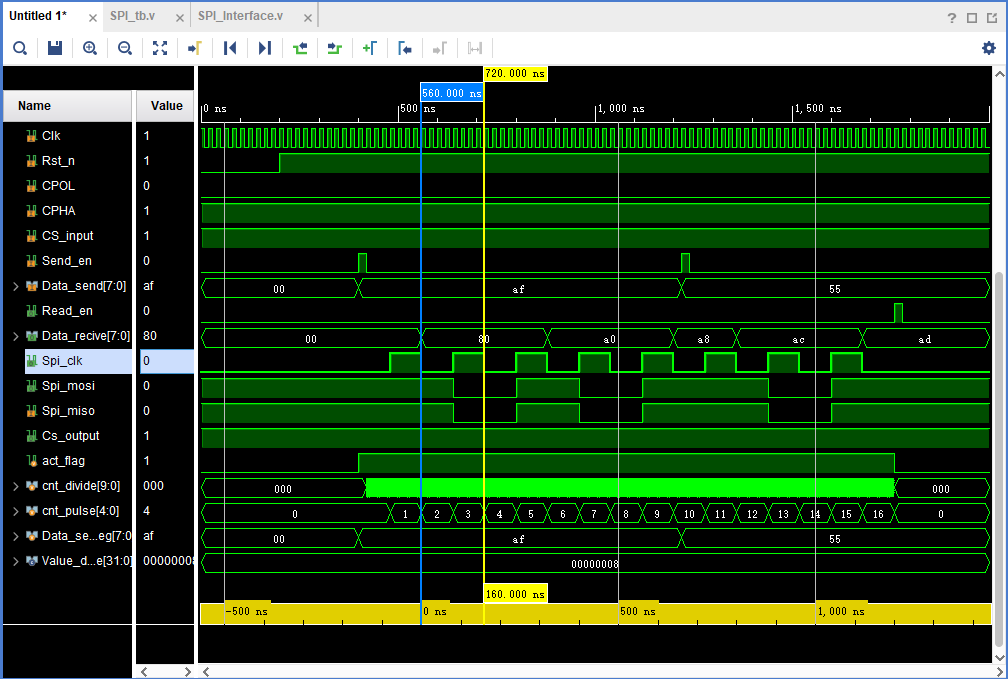
CPOL=1、CPHA=1;
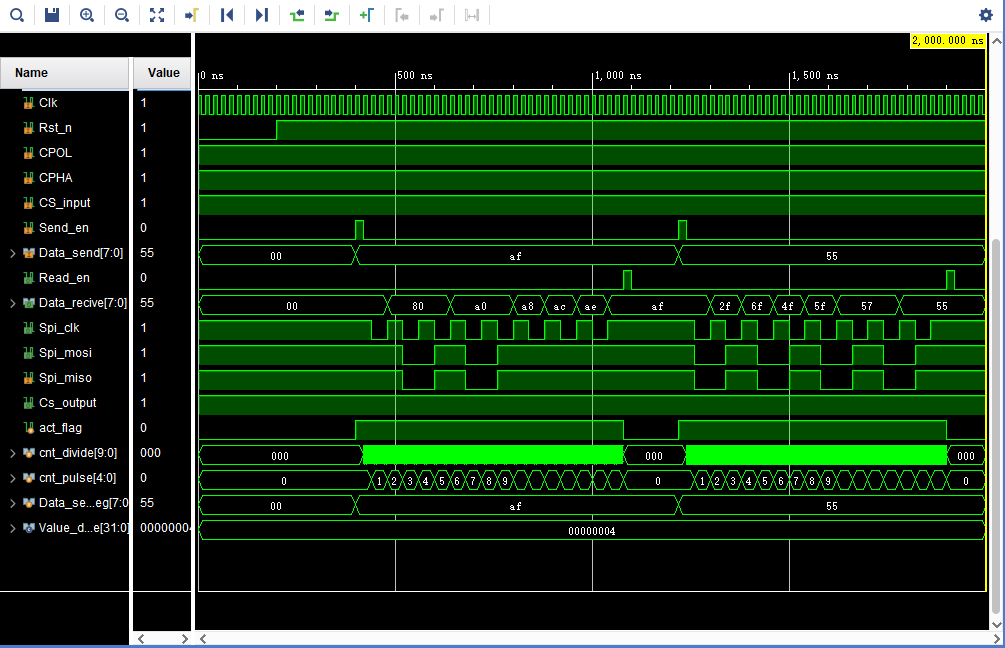
CPOL=1、CPHA=0;
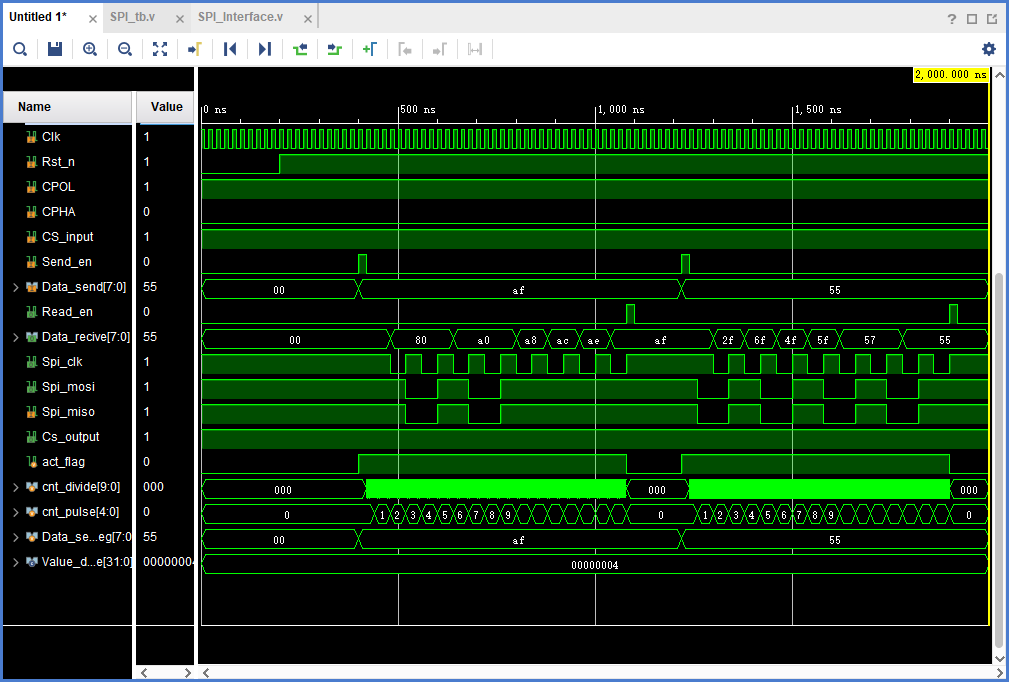
CPOL=0、CPHA=0;
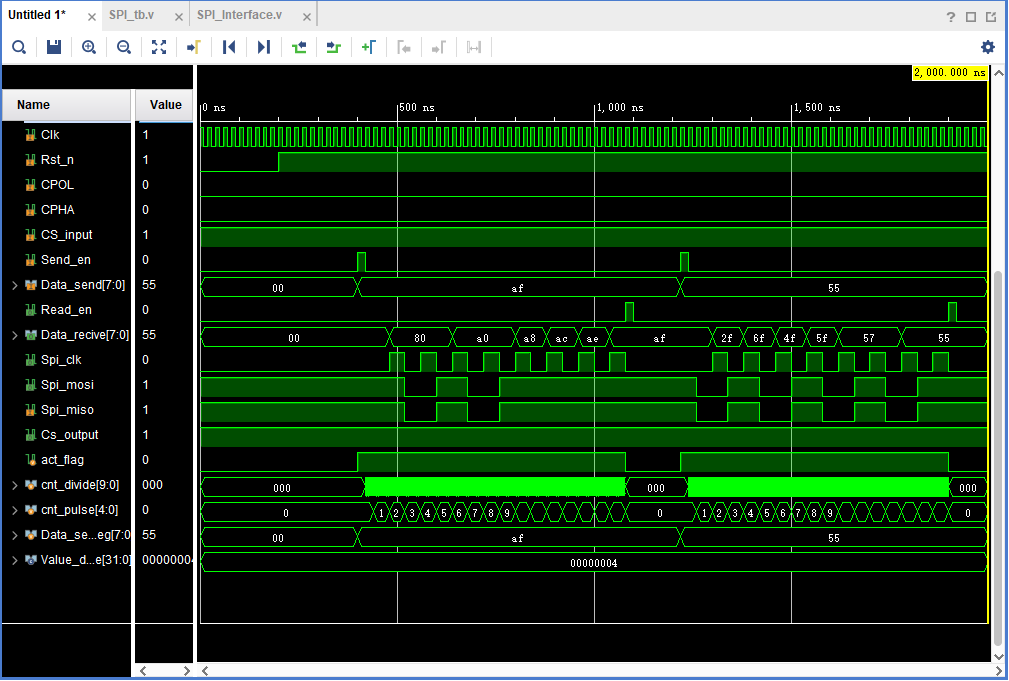
CPOL=0、CPHA=1;
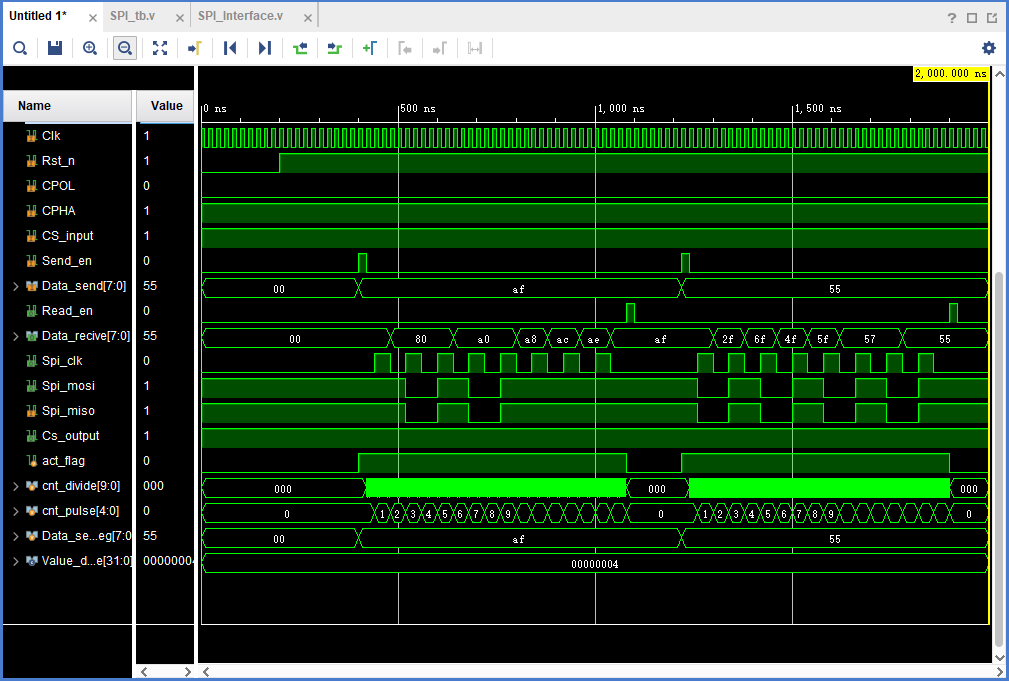
结论:仿真实验初步成功,能够满足SPI通信的基本要求。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号