用状态机实现串口多字节数据发送
这次设计一个多字节(8-256位)且波特率可更改(通过修改例化模块的参数)的串口发送模块。
1、状态机的设定
- 状态机的设定有空闲、发送、和数据移位三个状态,其中空闲状态为等待多字节发送的信号;
- 发送状态为给8位串口发送模块传输待发送的8位数据,同时判断是否发送完数据回到空闲状态;
- 数据移位状态为等到前面8位字节数据发送完后,将接下来待发送的8位数据移动到数据寄存器的低8位中。若数据在发送中则会进行等待;
2、需要的模块
(1)8位串口发送模块
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Engineer: Lclone
//
// Create Date: 2022/12/10 00:21:40
// Design Name: uart_byte_tx
// Module Name: uart_byte_tx
// Project Name: uart_byte_tx
// Description: 8位串口发送模块,波特率可通过参数设置。
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module uart_byte_tx
#(
parameter TX_BAUD = 9600,
parameter CLK_FQC = 50_000_000,
parameter BAUD_CNT = CLK_FQC/TX_BAUD)
(
input [7:0] Data,
input Send_en,
input Clk,
input Rst_n,
output reg Uart_Tx,
output reg Tx_done
);
reg [15:0] baud_cnt;
reg [ 3:0] bit_cnt;
reg Send_en_r;
reg Send_en_rr;
reg Tx_flag;
always @(posedge Clk) begin
Send_en_r <= Send_en;
Send_en_rr <= Send_en_r;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Tx_flag <= 0;
else if(~Send_en_rr & Send_en_r)
Tx_flag <= 1'b1;
else if(bit_cnt == 10 - 1 & baud_cnt == BAUD_CNT - 1)
Tx_flag <= 1'b0;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
baud_cnt <= 0;
else if(baud_cnt == BAUD_CNT - 1)
baud_cnt <= 0;
else if(Tx_flag)
baud_cnt <= baud_cnt + 1'b1;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
bit_cnt <= 0;
else if(bit_cnt == 10 - 1 & baud_cnt == BAUD_CNT - 1)
bit_cnt <= 0;
else if(baud_cnt == BAUD_CNT - 1)
bit_cnt <= bit_cnt + 1'b1;
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Uart_Tx <= 1'b1;
else if(Tx_flag == 0)
Uart_Tx <= 1'b1;
else case(bit_cnt)
0: Uart_Tx <= 1'b0;
1: Uart_Tx <= Data[0];
2: Uart_Tx <= Data[1];
3: Uart_Tx <= Data[2];
4: Uart_Tx <= Data[3];
5: Uart_Tx <= Data[4];
6: Uart_Tx <= Data[5];
7: Uart_Tx <= Data[6];
8: Uart_Tx <= Data[7];
9: Uart_Tx <= 1'b1;
default: Uart_Tx <= 1'b1;
endcase
end
always @(posedge Clk or negedge Rst_n) begin
if(Rst_n == 0)
Tx_done <= 1'b0;
else if(bit_cnt == 9 & baud_cnt == BAUD_CNT - 1)
Tx_done <= 1'b1;
else
Tx_done <= 1'b0;
end
endmodule
3、设计的模块代码
`timescale 1ns / 1ps
module uart_bytes_tx_3
#(
parameter DATA_WIDTH = 40,
parameter ROUNDS = DATA_WIDTH / 8
)
(
input Clk,
input Rst_n,
input [DATA_WIDTH-1:0] Bytes_data,
input Send_bytes_en,
output reg Tx_bytes_done,
output wire Uart_Tx
);
function integer clog2;
input integer value;
integer i;
begin
value = value - 1;
for (i = 0; value > 0; i = i + 1)
value = value >> 1;
clog2 = i;
end
endfunction
localparam S_IDLE = 3'd0;
localparam S_SEND = 3'd1;
localparam S_WAIT = 3'd2;
localparam ROUNDS_WIDTH = clog2(ROUNDS + 1);
reg [2:0] state;
reg [DATA_WIDTH-1:0] bytes_data_reg;
reg [7:0] data_reg;
reg send_en;
wire tx_done;
reg [ROUNDS_WIDTH-1:0] rounds;
uart_byte_tx
#(
.TX_BAUD (9600),
.CLK_FQC (50_000_000)
)
uart_byte_tx_inst
(
.Data (data_reg),
.Send_en (send_en),
.Clk (Clk),
.Rst_n (Rst_n),
.Uart_Tx (Uart_Tx),
.Tx_done (tx_done)
);
always @(posedge Clk or negedge Rst_n) begin
if (!Rst_n) begin
state <= S_IDLE;
bytes_data_reg <= {DATA_WIDTH{1'b0}};
data_reg <= 8'd0;
send_en <= 1'b0;
Tx_bytes_done <= 1'b0;
rounds <= {ROUNDS_WIDTH{1'b0}};
end
else begin
send_en <= 1'b0;
Tx_bytes_done <= 1'b0;
case (state)
S_IDLE: begin
rounds <= {ROUNDS_WIDTH{1'b0}};
if (Send_bytes_en) begin
bytes_data_reg <= Bytes_data;
state <= S_SEND;
end
else begin
state <= S_IDLE;
end
end
S_SEND: begin
if (rounds == ROUNDS) begin
Tx_bytes_done <= 1'b1;
state <= S_IDLE;
end
else begin
data_reg <= bytes_data_reg[7:0];
send_en <= 1'b1;
state <= S_WAIT;
end
end
S_WAIT: begin
if (tx_done) begin
bytes_data_reg <= bytes_data_reg >> 8;
rounds <= rounds + 1'b1;
state <= S_SEND;
end
else begin
state <= S_WAIT;
end
end
default: begin
state <= S_IDLE;
end
endcase
end
end
endmodule
endmodule
4、仿真验证
(1)仿真激励
`timescale 1ns / 1ps
module uart_bytes_tx_tb();
reg Clk;
reg Rst_n;
reg Send_bytes_en;
reg [63:0]Bytes_data;
wire Tx_bytes_done;
wire Uart_Tx;
uart_bytes_tx_3
# ( .DATA_WIDTH (64))
uart_bytes_tx_inst
(
.Clk (Clk),
.Rst_n (Rst_n),
.Bytes_data (Bytes_data),
.Send_bytes_en (Send_bytes_en),
.Tx_bytes_done (Tx_bytes_done),
.Uart_Tx (Uart_Tx)
);
defparam uart_bytes_tx_inst.uart_byte_tx_inst.BAUD_CNT = 10;
initial Clk <= 1'b1;
always #10 Clk <= ~Clk;
initial begin
Rst_n <= 0;
Bytes_data <= 0;
Send_bytes_en <= 0;
#200
Rst_n <= 1'b1;
#20
Bytes_data <= 64'h0123456789abcdef;
Send_bytes_en <= 1'b1;
#20
Send_bytes_en <= 0;
#20000
Bytes_data <= 64'hfedcba9876543210;
Send_bytes_en <= 1'b1;
#20
Send_bytes_en <= 0;
@(posedge Tx_bytes_done)
#100
$stop;
end
endmodule
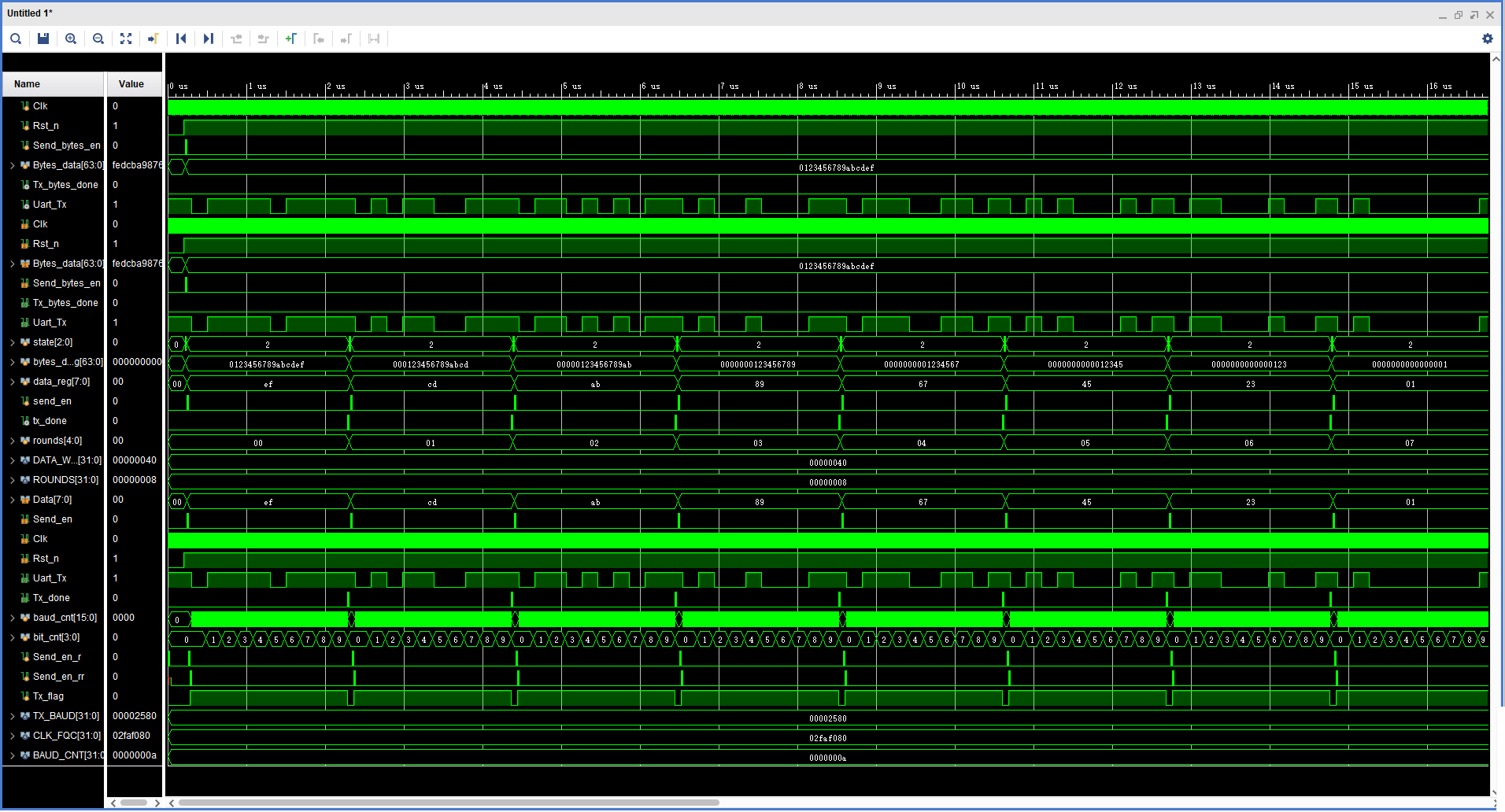
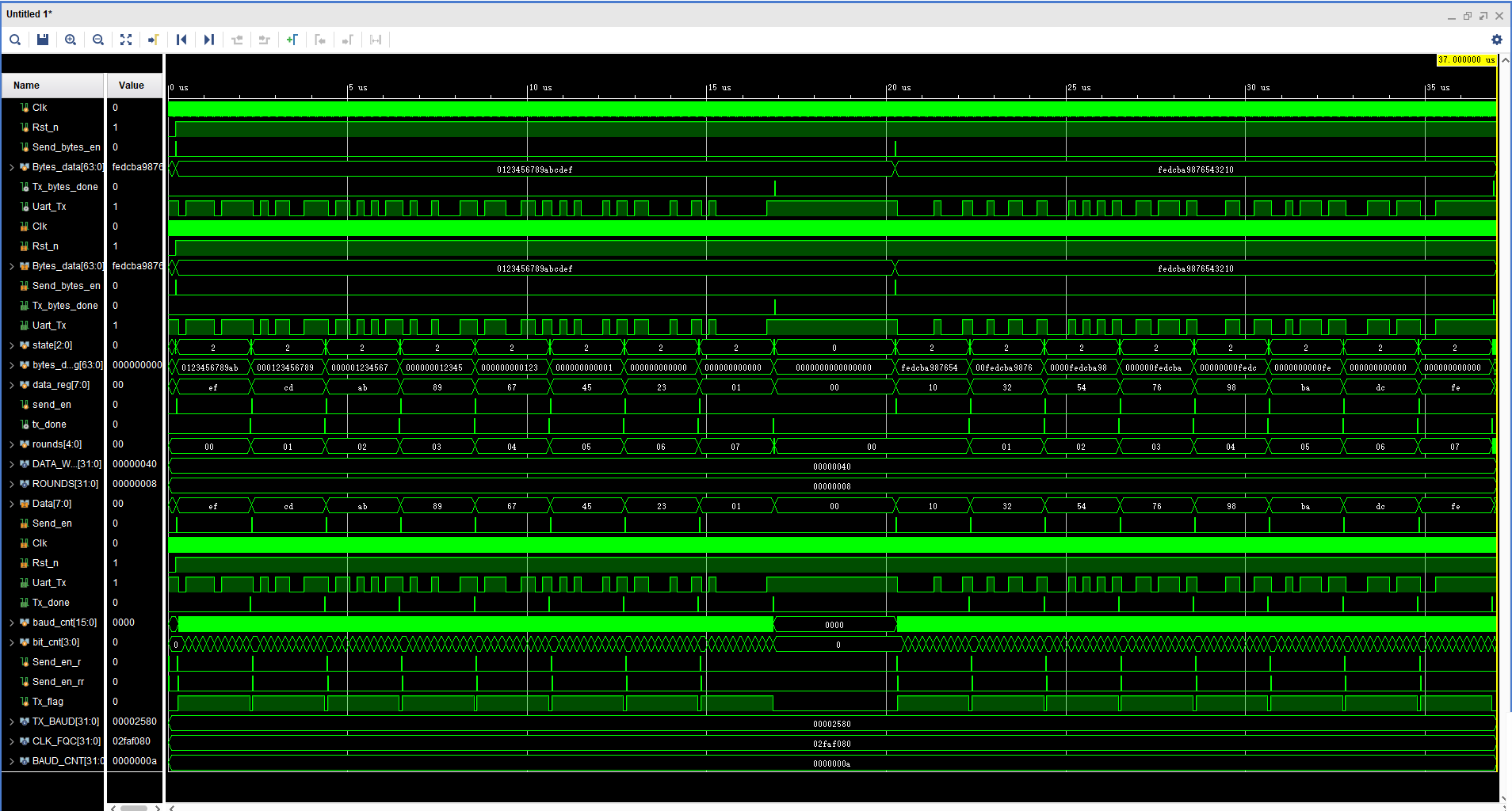
(2)仿真波形
第一轮发送:
两轮发送:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号