向量和矩阵求导公式总结
向量和矩阵求导
先说规律
先说结论,从标量、向量、矩阵他们之间可以互相求导,排列组合共有九种(3x3),即标量对标量求导、标量对向量求导、标量对矩阵求导;向量对标量求导、向量对向量求导、向量对矩阵求导;矩阵对标量求导、矩阵对向量求导,矩阵对矩阵求导。这些求导也不是什么高深的理论,也就是多元函数的偏导数的组合而已,只是应用到不同场景有不同意义。
我们需要掌握的是这9种求导后,结果的形状,也就是求导后张量的形状。下面给出一张图,列出了所有情况。
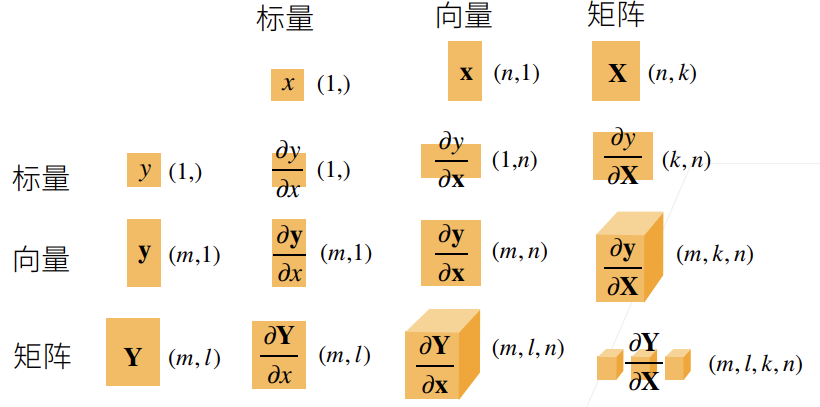
如图所示,横坐标表示自变量,纵坐标表示因变量,他们的排列组合有3x3共9种。
先说规律:求导的分母形状不变,分子的形状编程倒数,最后形状按照分子加分母的形状拼接,将形状为1的部分舍弃。举个例子,矩阵 \(Y_{m,l}\) 对向量\(x_{n,1}\)求导,分母形状不变为\((m,l)\),分子的形状变为倒数即\((1,n)\),然后拼接为\((m,l,1,n)\),舍弃1最终结果为\((m,l,n)\)。此方法叫做分子布局符号可以推广到更高维度,其实也就是一种计算方法,没有那么高深。
常见的求导(深度学习中)
1. 标量对标量求导
这种我们中学就学过的,一元函数求导。这里不在赘述。
2. 标量对向量求导
标量对向量求导,结果为向量。
这是机器学习里面最常见的,我们损失函数一般为标量,损失函数的输入为向量。说白了就是多元函数,
这里的三个自变量组成向量,就成了标量对向量的求导。下面举个具体的例子:
设标量为\(y_{(1,)}\),向量为\(x_{(3,1)}\),根据上面的分子布局符号规则结果形状为\((1,3)\),写成公式为
这样我们就理解了,所有的向量和矩阵之间的求导,最终都转化为逐个因变量分量与自变量分量的偏导数,然后再按照一定规律组合成多维张量。
常见的标量对向量求导
-
向量内积求导
\[令\space y = || x ||^{2} = <x,x> \space = x_{1}^{2}+x_{2}^{2}+x_{3}^{2} \\ 则 \space \frac{\partial y}{\partial x} = [2x_1,2x_2,2x_3] = 2x^{T} \\ \] -
向量之和求导
\[令\space y = sum(x)=x_1+x_2+x_3 \\ 则\space \frac{\partial y}{\partial x} = [1,1,1] \]
3. 向量对向量求导
向量对向量求导,结果为矩阵。
一般形式,设自变量为\(y_{(2,1)}\),因变量为\(x_{(3,1)}\),则根据分子布局符号规则,结果形状为\((2,3)\)。
则向量y对向量x求导为
常见向量对向量求导
-
列向量对列向量求导
\[令\space y_{(2,1)} = A_{(2,3)}x_{(3,1)} = \left[ \begin{matrix} a_{11}x_1+a_{12}x_2+a_{13}x_3 \\ a_{21}x_1+a_{22}x_2+a_{23}x_3 \end{matrix} \right] = \left[ \begin{matrix} y_1\\ y_2 \end{matrix} \right] \\ 则\space \frac{\partial y}{\partial x} = \left[ \begin{matrix} \frac{\partial y_1}{\partial x_1} & \frac{\partial y_1}{\partial x_2} &\frac{\partial y_1}{\partial x_3} \\ \frac{\partial y_2}{\partial x_1} & \frac{\partial y_2}{\partial x_2} &\frac{\partial y_2}{\partial x_3} \\ \end{matrix} \right]= \left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ \end{matrix} \right] = A \\ 总结: 令\space y = Ax, 则\space \frac{\partial y}{\partial x} = A,其中,x \in R^{n},y \in R^{m},\frac{\partial y}{\partial x} \in R^{m} \] -
横向量对列向量求导
\[令\space y = x^{T}A, 则\space \frac{\partial y}{\partial x} = A^T,其中,x \in R^{n},y \in R^{m},\frac{\partial y}{\partial x} \in R^{m,n} \]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号