函数的凸性
写在前面的
- 注:本文大部分内容在是对 2023年集训队论文集中《浅谈函数的凸性在 OI 中的应用——郭羽冲》的转述,心得,学习笔记。
- 注:本文兴趣化严重,只深入研究作者的一些感悟,忽略了很多作者自认为会的东西,并不很适合作为初学文章。
斜率优化
-
所谓斜率优化,是对 \(dp\) 转移的一种优化。顾名思义有时,\(dp\) 的状态数可能不是很多,但是 \(dp\) 每个状态的求解,确可能需要从 \(O(n)\) 状态转移过来,所以总复杂度就高了。
-
举例:将序列 \(a\) 划分成若干子段,代价为 段数\(\times w+\)每一段的 \(a_i\) 和的平方,要求最小化代价
-
设前缀和 \(s_i\),有转移 \(dp_i=\min\limits_{j=0}^{i-1}\{dp_j+(s_i-s_j)^2+w\}\)
-
观察,\(dp_{0,1,\cdots ,i-1}\to dp_i\) 都会有转移
-
对于每一个转移,列出他的 \(dp\) 式,\(dp_i=dp_j+(s_i-s_j)^2+w=dp_j+s_i^2+s_j^2-2s_is_j+w\)
-
我们将原问题放在直线与点上考虑,即考虑直线 \(y=kx+b\),其中 \((x,y)\) 为一组,\((k,b)\) 为一组
-
我们有两种思路
- 若把已知的 \(dp\) 值看做 \((x,y)\),那么在算未知的 \(i\) ,就是要求固定斜率的直线与 \(y\) 轴交点的纵坐标
- 具体的,\(dp_j+s_j^2=2s_is_j+dp_i-s_i^2\),\((s_j,dp_j+s_j^2)\) 视作一个点,那么过 \((s_j,dp_j+s_j^2)\) 的斜率为 \(2s_i\) 的直线,于 \(y\) 轴的交点即为 \(dp_i-s_i^2\),由此我们借助上下凸克来快所有可转移的直线中,交点中坐标最小的直线,就是通过加 \(s_i\) 解出 \(dp_i\)
- 若吧已知的 \(dp\) 值看做 \((k,b)\),那么在算未知的 \(i\) 就是,选出固定的 \(x\) 横坐标,和若干组直线的交点。
- 具体的,\(dp_i-s_i^2=-2s_js_i+dp_j+s_j^2\),\((k,b)=(-2s_j,dp_j+s_j^2)\) 视作以条直线,那么在直线 \((k,b)=(-2s_j,dp_j+s_j^2)\) 上的所有横坐标为 \(s_i\) 所对应的纵坐标即为 \(dp_i-s_i^2\),由此我们只需要用李超树即可优化转移过程。
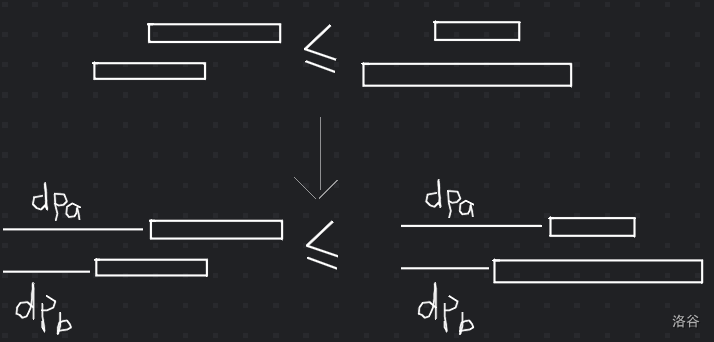
四边形不等式
- 若矩阵 \(A_{i,j}\) 满足四边形不等式,当且仅当,\(\forall a<b\le c<d,A_{a,c}+A_{b,d}\le A_{a,d}+A_{b,c}\)。这等价于 \(\forall a<b,A_{a,b}+A_{a+1,b+1}\le A_{a,b+1}+A_{a+1,b}\)
- 我们假象一种 \(dp_i=\min\{dp_j+calc(i,j)\}\),令 \(calc(i,j)=A_{i,j}\)
- 我们重写 \(\forall a<b\le c<d,calc(a,c)+calc(b,d)\le calc(a,d)+calc(c,b)\)
- 值得注意的:没准这里的 \(\le\) 可以当做偏序关系来理解,不是不可以 \(\ge\) ,\(min,max\),上下凸壳依旧相辅相成。
满足决策单调性
-
设 \(dp_x\) 的最优决策点为 \(a\),\(dp_y\) 的最优决策点为 \(b\),即 \(dp_a\to dp_x,dp_b\to dp_y\)
-
若 \(dp_i=\min\{dp_j+calc(i,j)\}\) 中的 \(calc(l,r)\) 满足四边形不等式,那么有最优决策点 \(x<y,a\le b\)
-
若是自己探索决策单调性应满足的限制的话
- 不是吧,其实我想不下去了,因为之前想的都是错的,我应该是没有任何头绪的,哪怕是一点点关于单调性的约束。
- 困难在哪呢,困难在若是想要完美的限制决策单调性,我们可能需要枚举所有的转移点,若是这样想大概率也是一个时间复杂度大小的限制,不太具有推广性。
-
神奇的,就在于四边形不等式用了一种弱的,对对立问题的限制,较强的约束了原问题。
- 如图所示,我们说,若反面 \(x<y,a>b\) 的决策点更优,则反面总和一定更优,而我们发现限制反面决策不优是困难的,因为正如上文我们需要枚举决策点。而要是只限制反面总和不优,一定是更强的限制,且可以做到。若反面总和更优应满足 \(dp_a+dp_b+[a,d]+[b,c]<dp_a+dp_b+[a,c]+[b,d]\)。
- 若构造 \([a,d]+[b,c]\ge [a,c]+[b,d]\) 那反面总和就没有机会更优,所以所有的反面一定不优,那决策单调性就一定单调。
- 咦,我们总和,比之枚举的好处在呢?决策点,单调。想要证明,涉及 \(dp\) 状态 \(dp_i\),最优决策点 \(b\),反正决策点 \(a\)。若 \(i\) 恒定,还有两个变量,若在钦定一个还剩一个。那是不是用二元关系的函数,来限制会更简单,一元关系需要枚举,这么说的话,是不是钦定两个决策点 \(a,b\) 用状态和作为函数比较,得到了一个比较强的约束。
- 哎,我在说什么,或许在证实一种猜想,或许在自圆其说,总是,给我不会的东西找理由。
满足关于段数那维成凸性
- 这个,请自行看论文,超出能力范围,并没有独到的感悟
寻找凸性的三种方法
-
转移满足四边形不等式矩阵,最小值,最大值,关于段数,成下凸、上凸关系。
-
可构造费用流模型,可以证明最小费用、最大费用,关于最大流流量的不同、承下凸,上凸关系。
-
亦可以考虑凸函数的直接相加。在不就定义了吧
wqs 二分
-
若我们要,求的东西是凸的,而且只关心凸函数的一个点的值,我们可以通过二分斜率,每次得到当前斜率的直线与凸壳边界相交的位置,找到那个位置的横坐标,即段数,和我们所需的段数的差距,之后继续进行二分调整。
-
我们二分有什么好处呢?好处在于把一个限制划分区间个数的 \(dp\) 化为,任意划分的 \(dp\) 这种 \(dp\) 往往可以少一维状态,有时还可以进一步优化。
-
值得注意的是,我们怎么求当前斜率与凸包且的点的最小代价在哪呢?
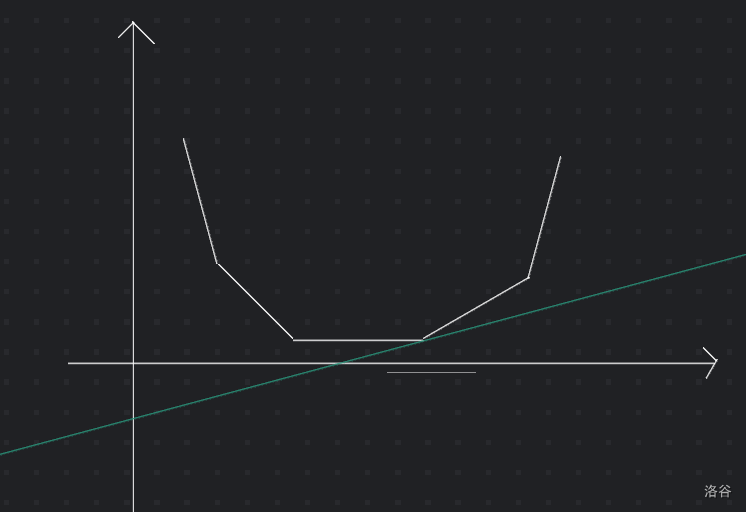
- 这是我们想要的最低点。他与别的情况有什么不同呢

- 显然,它是与 \(y\) 轴交点最小的点
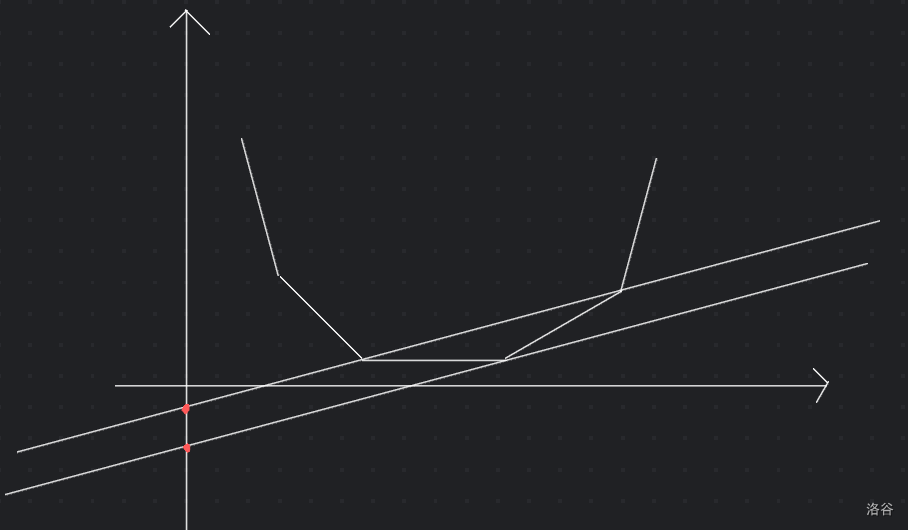
- 那我们在设计 \(dp\) 的时候不妨将每一段的贡献,减去 \(k\) 我们二分的斜率,这样的话总答案就是,真实答案\(-\)段数\(\times k\),这恰好是与 \(y\) 轴相交纵坐标的值,我们只要算出它的最小值的的段数,就是取到最低点的段数。这样我们就巧妙的通过减一个贡献的方法,扩展到了取任意段的做法。
- 其实我知道我没讲清楚,只不过是我的一些感受罢了,怎么说以后有时间再来完善吧。
\((min,+)\),\((max,+)\) 卷积
-
\(f_i=\min\limits_{x=0}^i\{a_{x}+b_{i-x}\}\) 这就是所谓的 \((min,+)\) 卷积
-
\(f_i=\max\limits_{x=0}^i\{a_{x}+b_{i-x}\}\) 这就是所谓的 \((max,+)\) 卷积
-
对于大多是情况,这种卷积是没有办法快速进行的,给出序列 \(a,b\) 需要 \(O(\text n^2)\) 才能计算出答案
-
有特例,若 \(a,b\) 都是下凸函数,则可以通过按斜率排序 \(O(\text n)\) 快速生成 \((min,+)\) 卷积的 \(f\)。
-
若 \(a,b\) 都是上凸函数,则可以通过按斜率排序 \(O(\text n)\) 快速生成 \((max,+)\) 卷积的 \(f\)。
维护凸函数 slope trick
- 其实就是用堆呀,set 什么的维护,斜率变化的位置。
- 以下凸为例,斜率必然单调上升,我们维护在店 \(x\) 斜率上升了多少,即可,不维护斜率不变的位置。
- 有时可能需要记录 \(x=0\) 的 \(f(x)\) 值,这样的话就能把整个函数求出来,有时候分段维护,一部分斜率小于 \(0\) 一部分斜率 \(\ge 0\),动态记录斜率为 \(0\) 的位置就是最小值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号