Ti毫米波学习笔记---测速
前言
在了解了毫米波雷达的测速原理后,在本章我们将继续说明毫米波雷达另外一个重要功能,测速原理。
IF信号的相位
如果我们想要了解FMCW雷达响应,物体极小位移的能力,那么研究中频信号的相位信息就非常重要。雷达也是根据如此可以非常快速和准确的测量出物体的速度。在之前的文章中我们已经补充了Fourier 变换的相关知识,我们通常使用Fourier变换来将一个信号从时域变换到频域,如下图所示,左边的是时域的信号,右边是Fourier变换后的频谱。

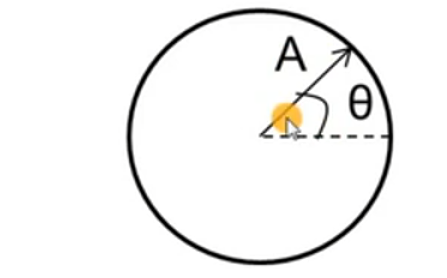
信号可以使用复数的形式来进行表示\(f(t) = Ae^{j\theta}\),其中\(A\)为信号的幅度,\(\theta\)为信号的相位。在图像上可以向量进行表示,向量的长度为幅度,向量的旋转角为相位,这两种表示方式是等价的,在本章中我们使用向量图像的形式来表示信号,因为相比于代数表示而言,向量图像更为直观。
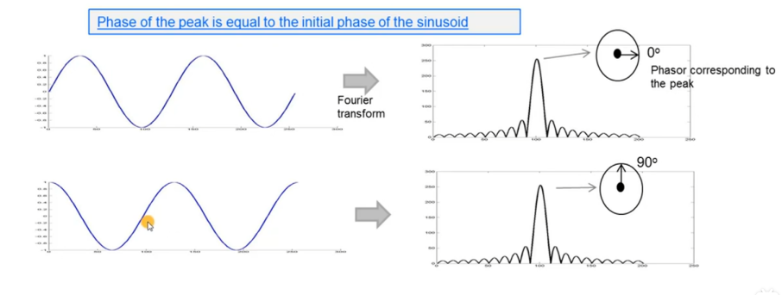
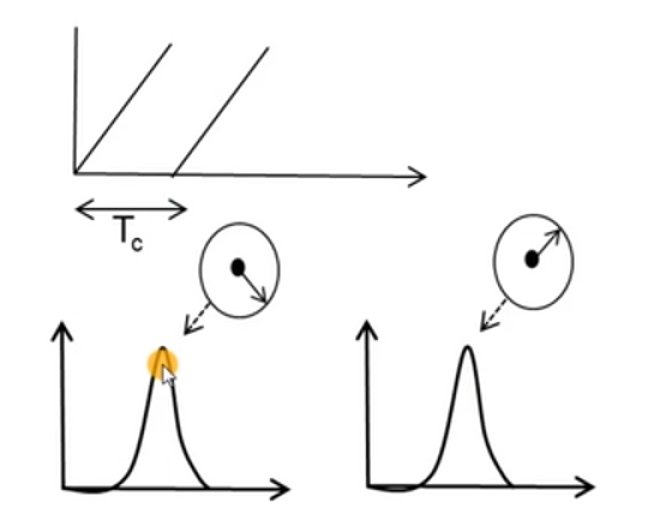
在这里补充一个Fourier变换的性质,峰值对应的相位对应于信号的初始相位。正如下图所示,对于相同频率不同初始相位的波形进行傅里叶变换后,其频谱的峰值点的位置是相同,但是其峰值对应的相位是不同,例如第一个图的初始相位为0°而第二个图的初始相位为90°。
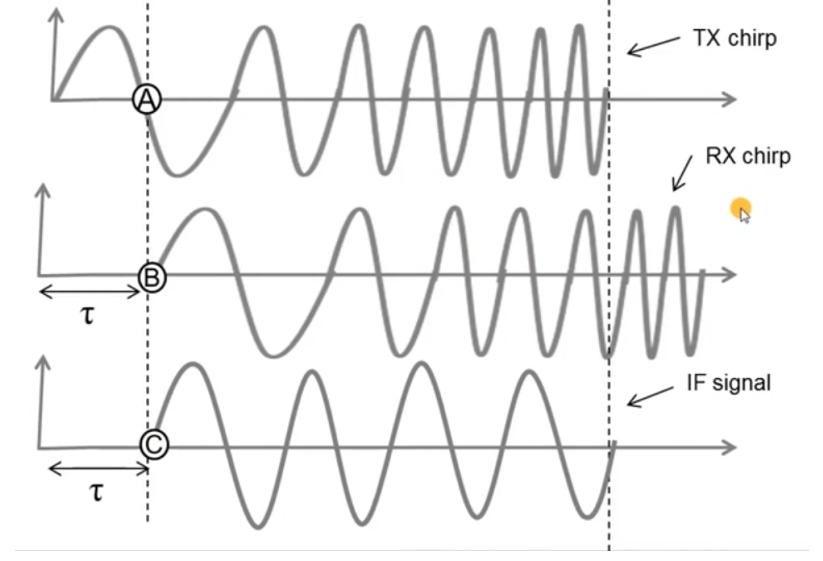
接下来我们将对雷达的信号的相位来进行分析,雷达发送的信号为chirp信号,如下图所示,第一幅图是发送的chirp信号,第二幅图是接收chirp信号,它是发送的chirp信号延时\(\tau\)的结果,\(\tau\)是往返延时,最后一幅图是混频器输出的中频信号。
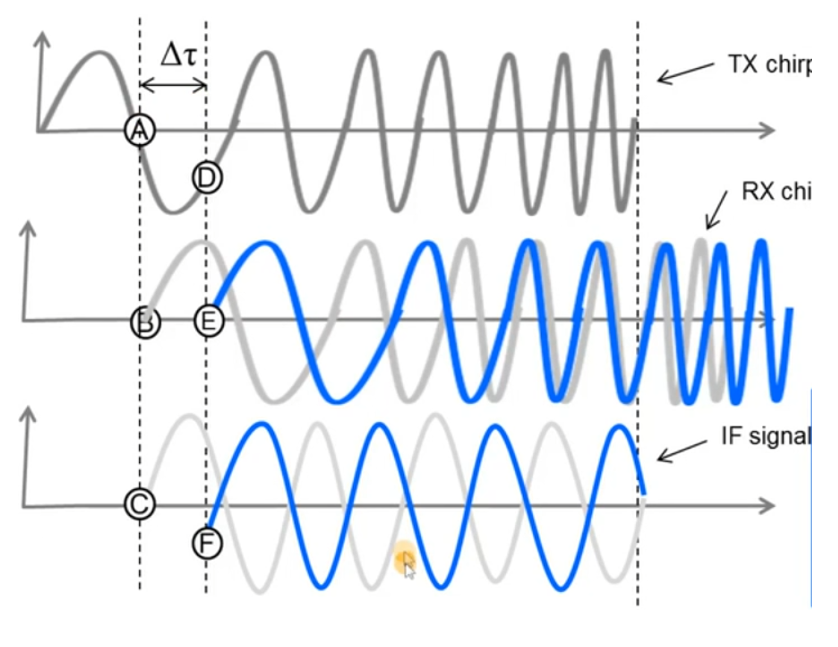
现在如果假设存在一个微小的位移,雷达的信号相位会发生什么样的变换了? 当雷达发生一个微小的变化\(\Delta d\)时,由于雷达的距离发生了变化,所以雷达的往返时间也会随着发生变化\(\Delta \tau\),即接受信号的初始相位将从B点变换到E点,IF信号初始相位将会从C点变换到F点。当变换\(\Delta \tau\)时,发送的chirp信号从A到B将会产生一个\(\Delta \phi = 2\pi f_{c}\Delta\tau\)的相位偏移,这个偏移会直接的反映在IF信号的初始相位上,由之前的知识可以得到\(\tau = \frac{2d}{c}\),所以\(\Delta \phi = 2\pi f_{c}\Delta\tau = \frac{4\pi \Delta d}{\lambda}\)。
中频信号对于物体微动的敏感性
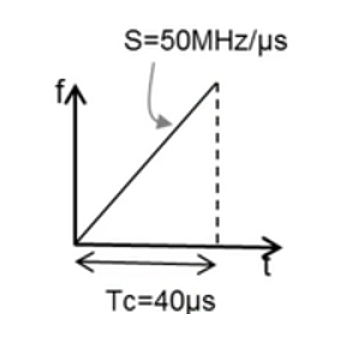
现在我们对中频信号进行分析,中频信号可以写成\(Asin(2\pi ft+\phi_{0})\),其中中频信号的频率\(f = \frac{S2d}{c}\)与物体距离雷达的距离呈线性关系,\(\Delta \phi = \frac{4\pi\Delta d}{\lambda}\)变换的相位与微小变化\(\Delta d\)呈线性关系。现在我们要分析物体发生微小位移时,雷达信号的中频信号的频率和相位是如何发生变化。注意这里的微小的概念是变化距离相比较雷达距离分辨率是微小的。因此变换为若干毫米。 在这里我们假设微小的距离变化为 1mm,而雷达发送的chirp信号如下图所示。那中频的信号频率和相位变化是如何的了?
这里就可以得到一个重要的结论:对于微小的变化而言,相位是十分敏感,而频率不是很敏感。
如何使用2chirp来对单个物体进行测速
在了解上面的知识后,我们有了FCMW雷达对物体测速的所有前提知识。接下来我们来说明如何利用这些知识来对物体进行测速。假设在雷达前方存在一个微动的物体,这时我们发送两个chirp信号,chirp信号之间的间隔为\(T_{c}\),然后分别对两个chirp产生的中频信号进行FFT变换,过程如下图所示。根据上一节的分析可以得知,频谱图将在相同的位置具有峰值,但是具有不同的相位,这两个峰值的相位之间的测量相位差为\(\omega\)将于物体的运动直接对应。如果物体的速度为\(v\),则物体在此时间段\(T_{c}\)内的移动距离为\(\Delta d = vT_{c}\),由上面的公式\(\Delta \phi = \frac{4\pi \Delta d}{\lambda}\)得\(\phi = \frac{4\pi vT_{c}}{\lambda} => v = \frac{\lambda \phi }{4\pi T_{c}}\),所以我们可以两个chirp的中频信号相位差来估算速度。这里的我重点就是我们可以使用两个chirp信号的峰值的相位差来估算单个物体的速度。
测速应用
在实际中我们常常利用这个特点做一些有趣的应用,这些应用包括如心跳的检测,电机震动的检测。例如有一个物体随着时间进行微小变化,那么相位的变换情况如下图所示:
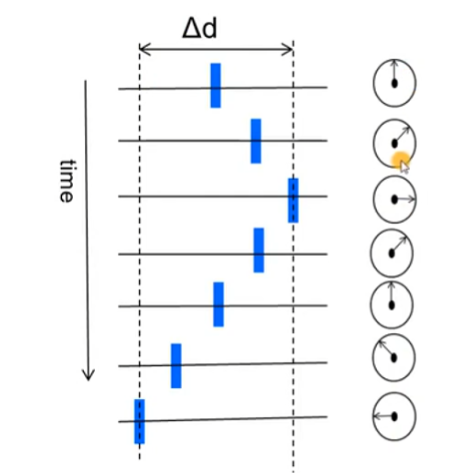
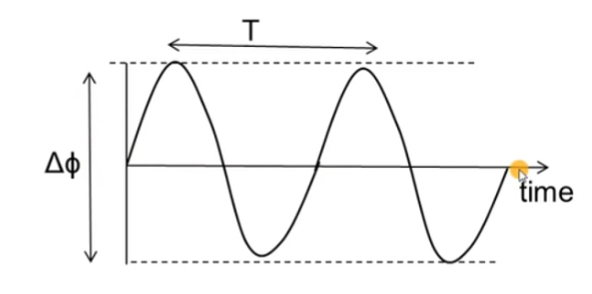
如果我们根据时间的顺序,绘制测量的峰值相位,可以得到以下相位和时间的图,分析该图可以得到最大的\(\Delta \phi\)和最大微动\(\Delta d\)相关。\(\Delta d = \frac{\lambda \Delta \phi}{4\pi}\)
速度分辨率和最大检测速度
在学习之前的知识后,这章主要来分析以下几个问题:
- What if there are multiple objects,perhaps at the same range? How close can the 2 velocities get and still be resolved by the radar? 当两个目标的速度靠近多少时,依然可以将速度分辨出来。
- Is there a limit on the maximum velocity that a radar can measure 雷达的最大分辨速度?
离散情况下傅里叶变换补充知识
到目前我们已经考虑的连续信号的傅里叶变换,这些性质对于离散信号傅里叶变换也同时是成立的,我们假设这里有一个离散的信号如下图左边所示,改向量以每一个样本\(\omega_{1}\)旋转, 其频谱图如右图所示,这个单个信号的频谱情况。是否存在限制?
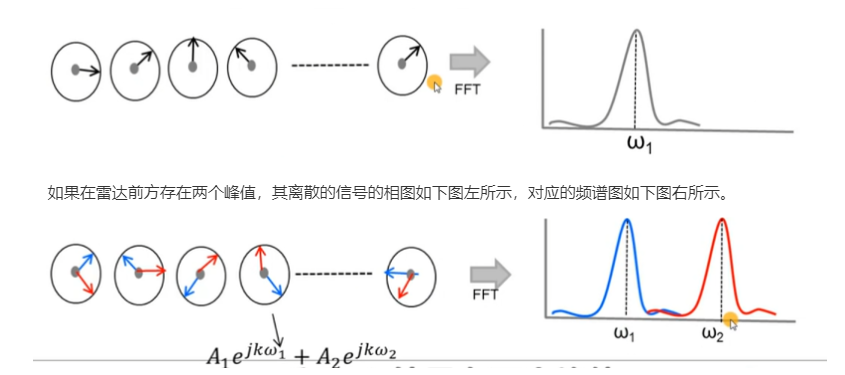
如果在雷达前方存在两个峰值,其离散的信号的相图如下图左所示,对应的频谱图如下图右所示。

那么这里的问题就是,其对应的\(\omega_{1}\)和\(\omega_{2}\)两个频率要相隔多远才能在傅里叶变换中显示为单独的峰值,在下图,有两个不一样的蓝色\(\omega_{1}\)和红色\(\omega_{2}\)在经过N个采样后,\(\omega_{2}\)比\(\omega_{1}\)多走了半个周期的\(\pi\)弧度,通过FFT变换的结果发现无法将\(\omega_{1}\)和\(\omega_{2}\)两个频率给分离出来。

如果我们将观测的时间段拉长,采集的N为原来的两倍,现在我们就有2N个样本,而不是之前的N个样本,这样和\(\omega_{1}\)相比\(\omega_{2}\)旋转了一个完整的周期。这样可以明显的看到通过FFT变换后可以分辨出两个不同的频率。

所以对比这两个过程我们得到一个结论,系列的长度越长,分辨率的长度越高,一般来说,长度为N的序列,可以分隔被大于每个样本\(2\pi N\)弧度分隔的角频率。
我们花一点时间来比较一下离散和连续分段对的分辨标准,
对于连续信号,只要两种频率的间隔差值\(\Delta f\)大于等于观测窗口\(T\)便可以将信号的频率进行分离。
对于离散信号,只要两种离散信号的频率的间隔\(\omega\)大于每个样本\(2 \pi N\)弧度就可以分辨两种频率。
在解决了两个频率差多少可以区分出来后,后续我们就可以通过频率和速度的关系来得到在v差异多少时可以将v分辨出来的问题。
可测量最大速度
那么可测量的最大速度是否存在,请注意,由于速度的测量依赖于相位差的,只要当差值介于正负180度之间时,才能清楚的测量此值。例如下图,当物体是远离雷达时可以可视化逆时针运动的相量,对于靠近雷达速度可以可视化顺时针的相量,而当相量超过180度,则会 产生模糊,就会不明白究竟是物体是远离雷达还是靠近。所以要清楚的测量速度,两个chirp信号之间的相位变化必须小于\(\pi\),这说明了\(\frac{4\pi vT_{C}}{\lambda} < \pi => v < \frac{\lambda}{4T_{c}}\),所以可测量的速度\(v_{max} = \frac{\lambda}{4T_{c}}\),因此如果需要测量很快的速度,则chirp信号就需要很密集。

速度分辨率
在之前的案例中都是考虑了雷达的前方存在单个个物体的速度,但是实际上只要物体距离雷达的距离不同,那使用这种方法应用于前方的多个目标中,但是如果雷达前方距离相同的位置存在多个不同速度的物体有应该如何进行区分?显然如何使用两个chirp来进行相位比较的方法是难以实现的,因为这个时候的向量具有来自多个物体的速度,如下图所示。
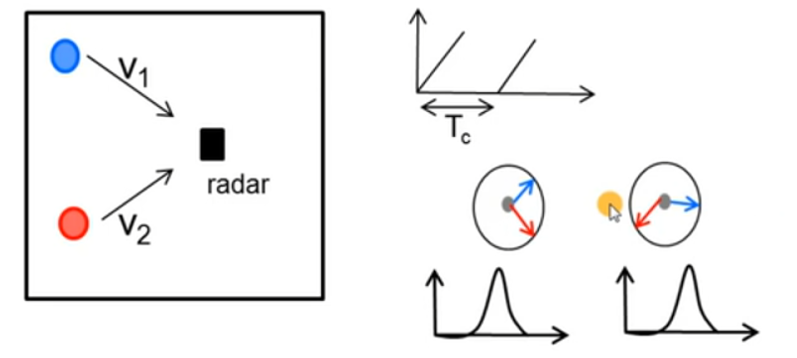
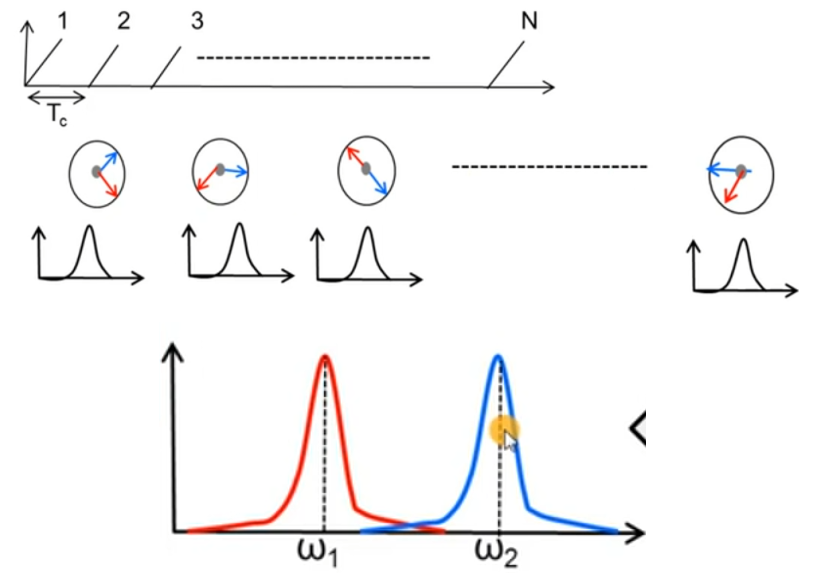
一种解决方案是发射一系列等间隔的线性调频脉冲,而不仅仅是两个线性调频脉冲,在将等到峰值的相位进行FFT变化既可以得到相位的FFT结果。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号