
2021.3.26| Velodyne仿真订阅话题输出pcd文件并三维重构
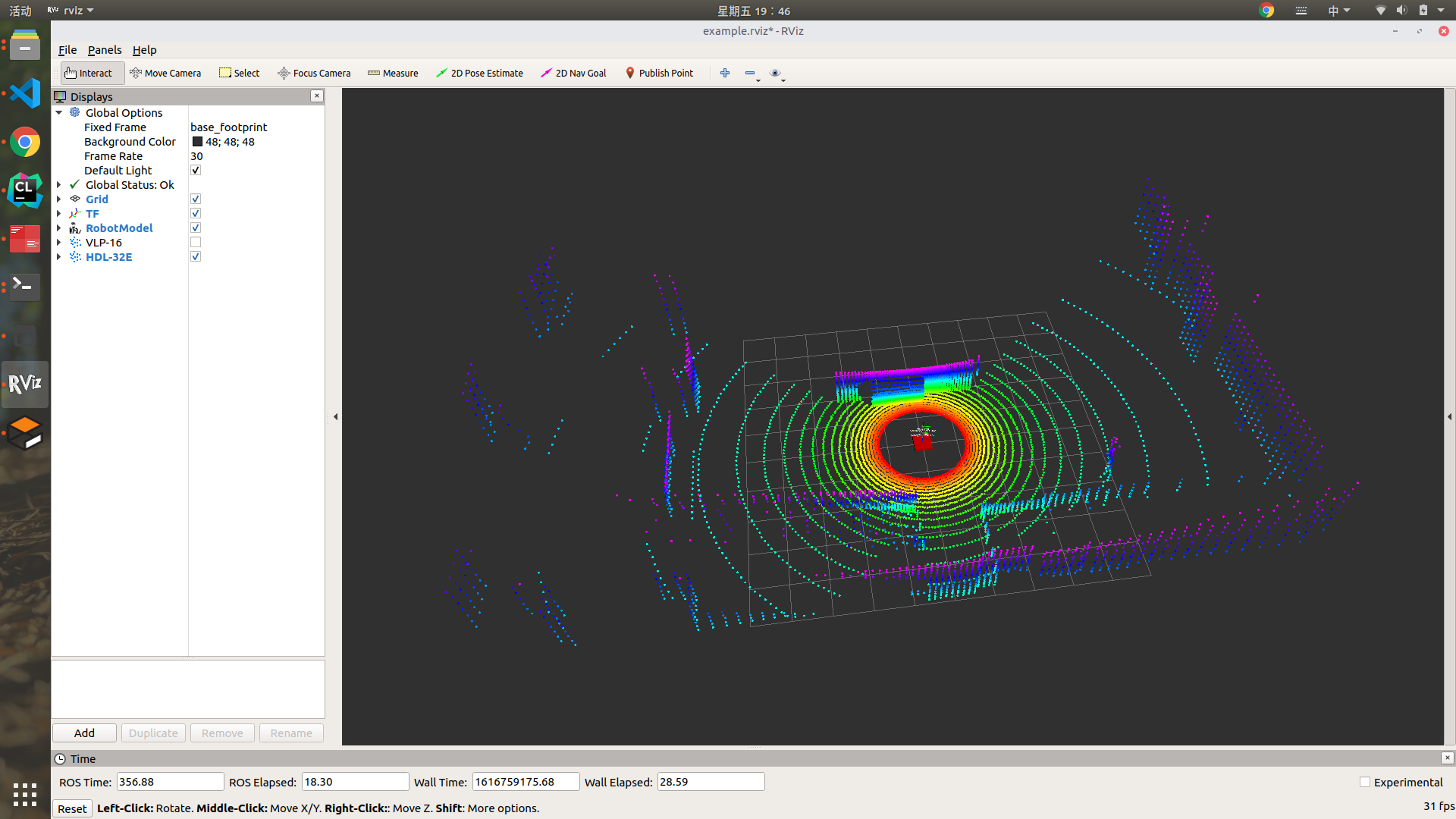
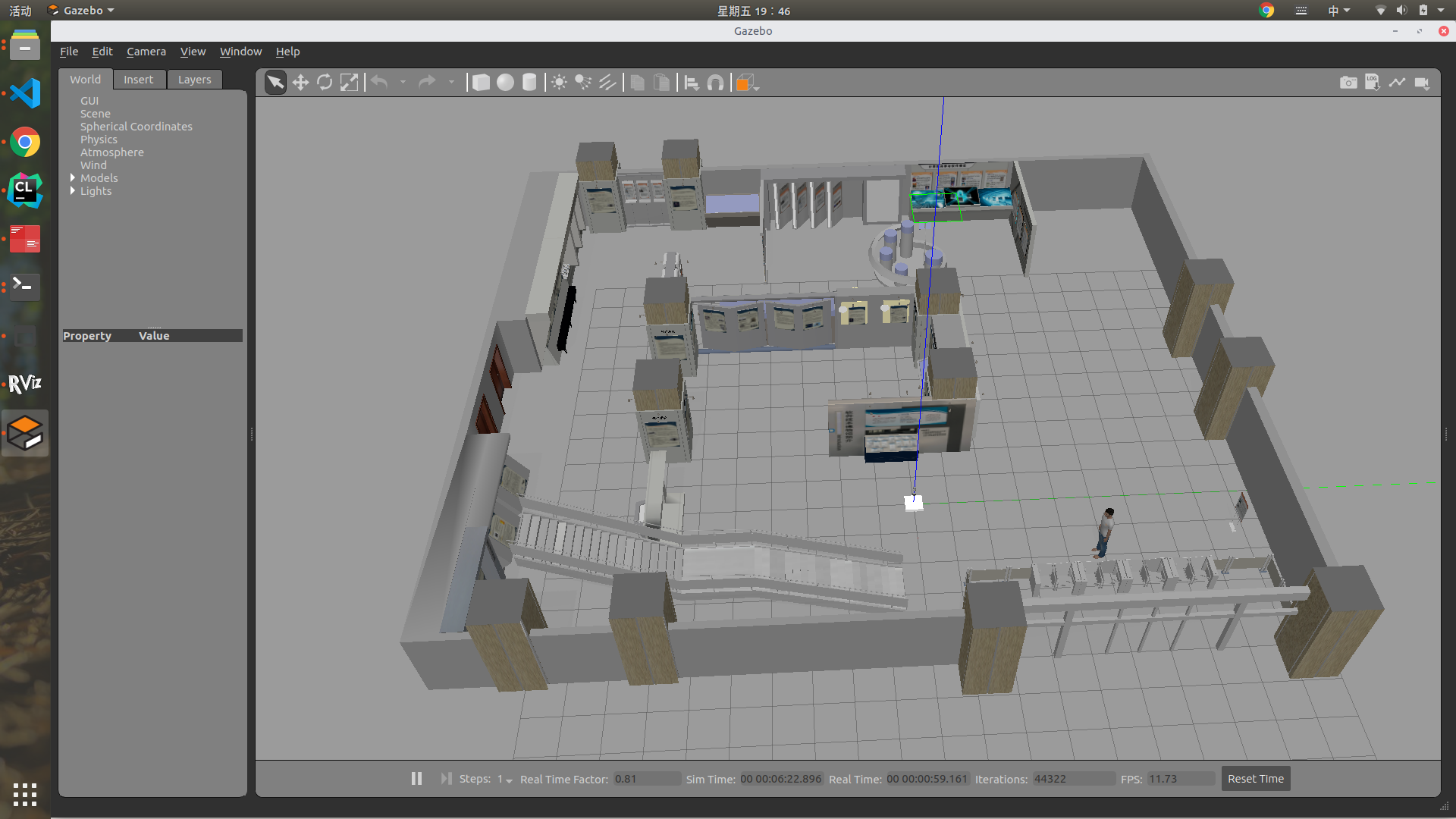
1.运行velodyne_simulator/velodyne_description/launch/example.launch
velodyne_simulator包从下面网址git
https://bitbucket.org/DataspeedInc/velodyne_simulator/src/master/
2.参考 http://wiki.ros.org/pcl_ros#bag_to_pcd
利用pcl_ros包下的功能。
rosrun pcl_ros pointcloud_to_pcd input:=/my_cloud _prefix:=/tmp/pcd/vel_
其中my_cloud是话题名称 ,/tmp/pcd/vel是文件前缀,保存后文件大概像是vel_2541215151.pcd这样。
运行之后就会看到源源不断的生成pcd文件。
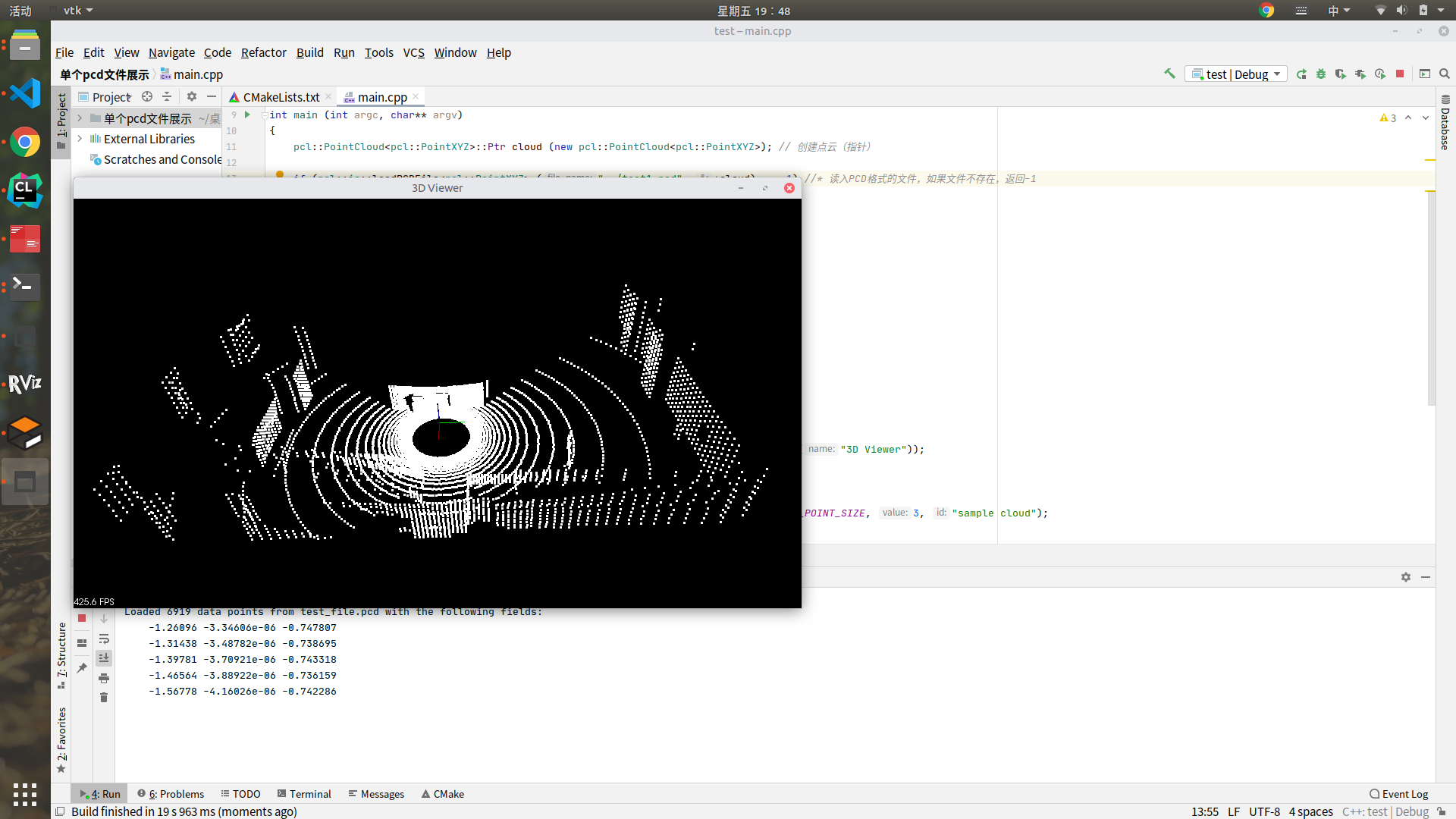
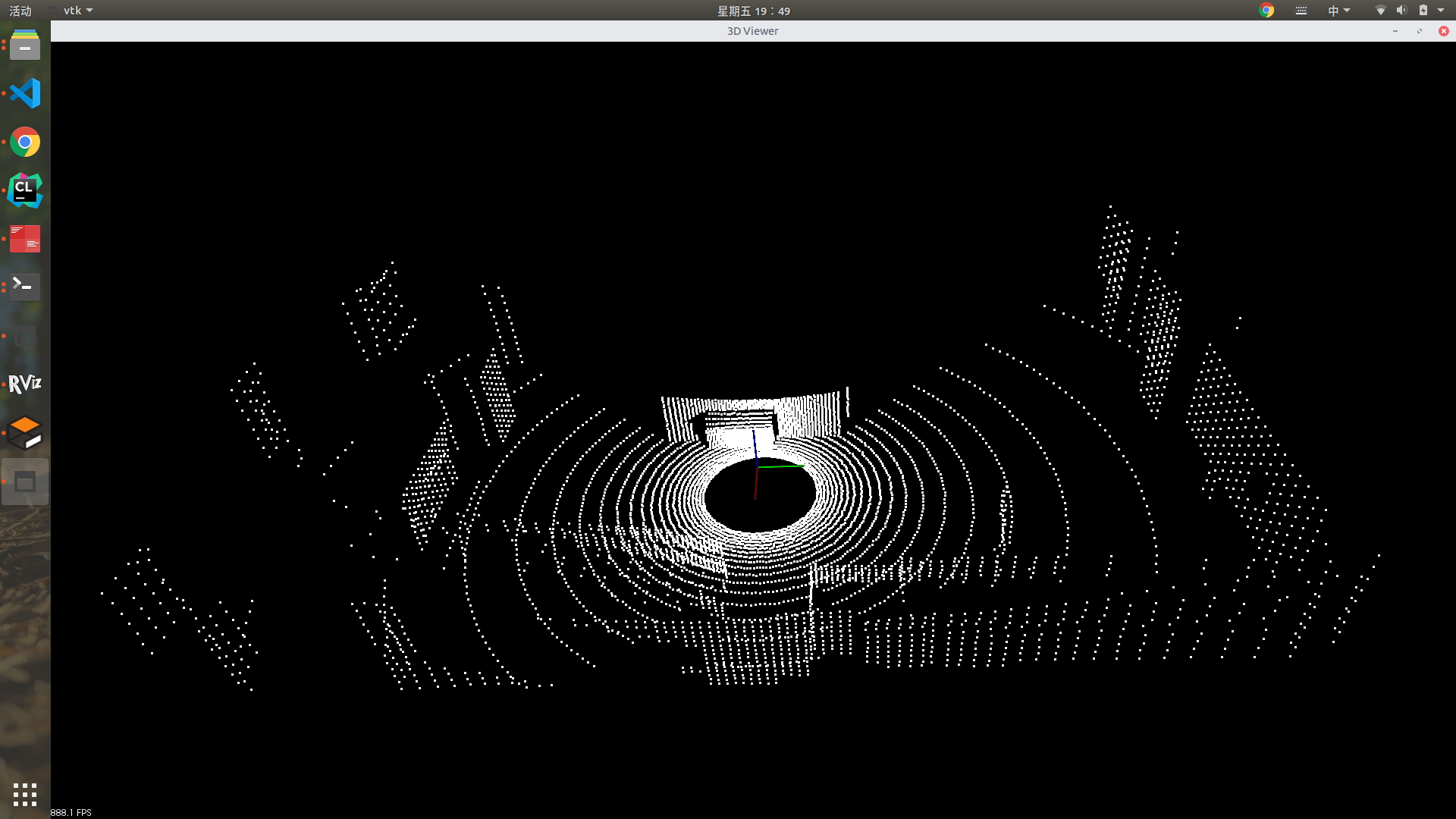
3.将读取的PCD文件用c++的pcl打开并显示。
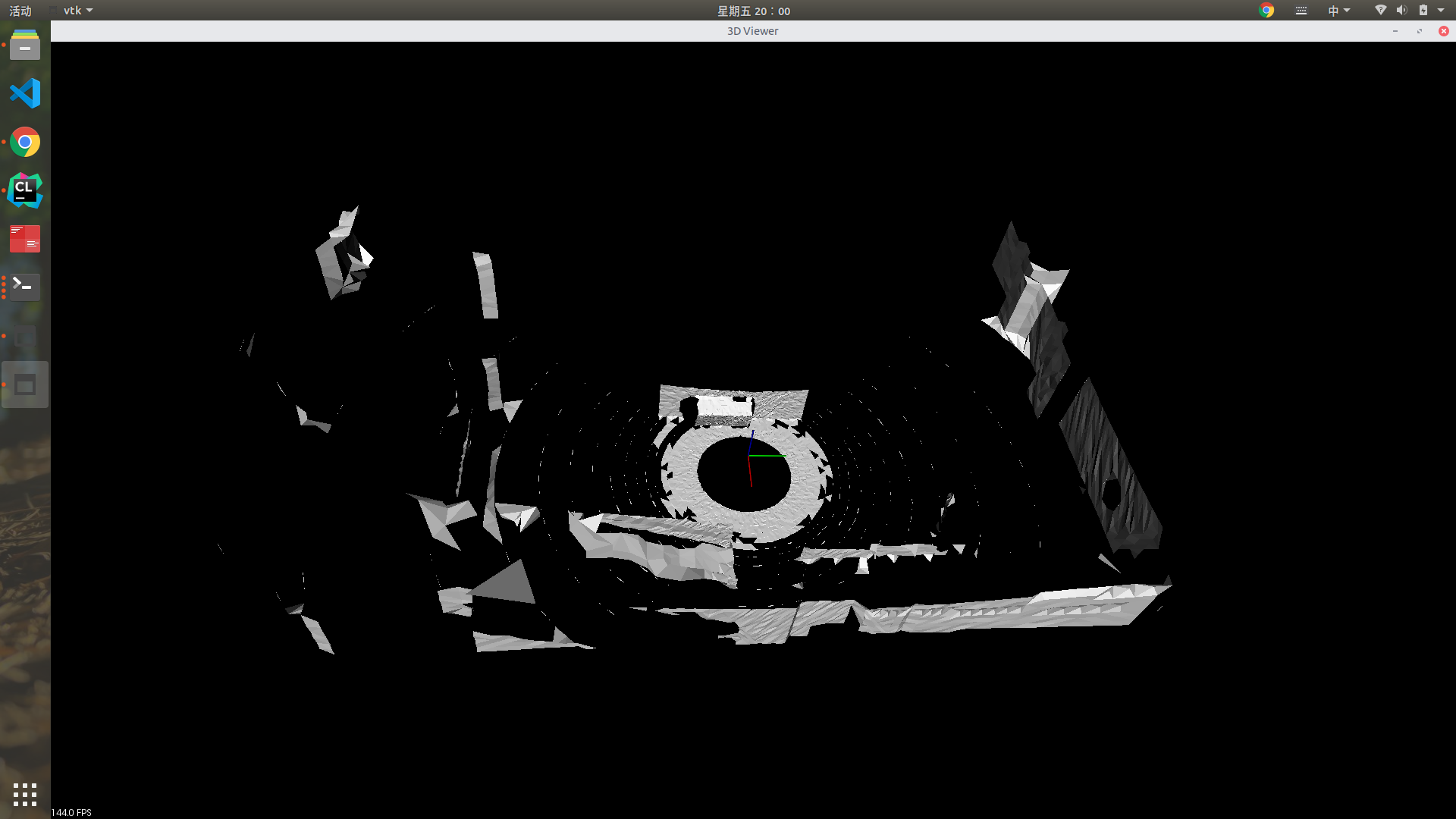
4.运用贪婪三角投影算法进行三维重构。
以下是过程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号