
2021.3.20| ROS常用组件
1.坐标系查看并生成pdf文件。
rosrun tf2_tools view_frames.py
运行 evince frames.pdf
查看pdf文件。
2.rosbag录制(命令行)
rosbag record -a -o 文件名 录制文件
rosbag info 文件名 查看文件信息
rosbag play 文件名 回放文件
3.rosbag录制(C++)
(1)写bag
#include "ros/ros.h"
#include "rosbag/bag.h"
#include "std_msgs/String.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"bag_write");
ros::NodeHandle nh;
//创建bag对象
rosbag::Bag bag;
//打开
bag.open("/home/rosdemo/demo/test.bag",rosbag::BagMode::Write);
//写
std_msgs::String msg;
msg.data = "hello world";
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
//关闭
bag.close();
return 0;
}
(2)读bag
/*
读取 bag 文件:
*/
#include "ros/ros.h"
#include "rosbag/bag.h"
#include "rosbag/view.h"
#include "std_msgs/String.h"
#include "std_msgs/Int32.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"bag_read");
ros::NodeHandle nh;
//创建 bag 对象
rosbag::Bag bag;
//打开 bag 文件
bag.open("/home/rosdemo/demo/test.bag",rosbag::BagMode::Read);
//读数据
for (rosbag::MessageInstance const m : rosbag::View(bag))
{
std_msgs::String::ConstPtr p = m.instantiate<std_msgs::String>();
if(p != nullptr){
ROS_INFO("读取的数据:%s",p->data.c_str());
}
}
//关闭文件流
bag.close();
return 0;
}
4.rqt工具箱
包括rqt_graph、rqt_console、rqt_plot、rqt_bag等插件。
其中,rqt_bag可以更方便的录制和重放bag文件。
启动方式:rqt
5.机器人仿真系统。
URDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度.....,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。
RViz 是 ROS Visualization Tool 的首字母缩写,直译为ROS的三维可视化工具。它的主要目的是以三维方式显示ROS消息,可以将 数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感 器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等
Gazebo是一款3D动态模拟器,用于显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
机器人的系统仿真是一种集成实现,主要包含三部分:
-
URDF 用于创建机器人模型
-
Gzebo 用于搭建仿真环境
-
Rviz 图形化的显示机器人各种传感器感知到的环境信息
三者应用中,只是创建 URDF 意义不大,一般需要结合 Gazebo 或 Rviz 使用,在 Gazebo 或 Rviz 中可以将 URDF 文件解析为图形化的机器人模型,一般的使用组合为:
-
如果非仿真环境,那么使用 URDF 结合 Rviz 直接显示感知的真实环境信息
-
如果是仿真环境,那么需要使用 URDF 结合 Gazebo 搭建仿真环境,并结合 Rviz 显示感知的虚拟环境信息
具体的urdf语法和xacro语法略过。
6.Arbotix
创建配置文件。
control.yaml
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}
在launch文件中配置arbotix节点
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find my_urdf05_rviz)/config/hello.yaml" command="load" />
<param name="sim" value="true" />
</node>
<node> 调用了 arbotix_python 功能包下的 arbotix_driver 节点
<rosparam> arbotix 驱动机器人运行时,需要获取机器人信息,可以通过 file 加载配置文件
<param> 在仿真环境下,需要配置 sim 为 true
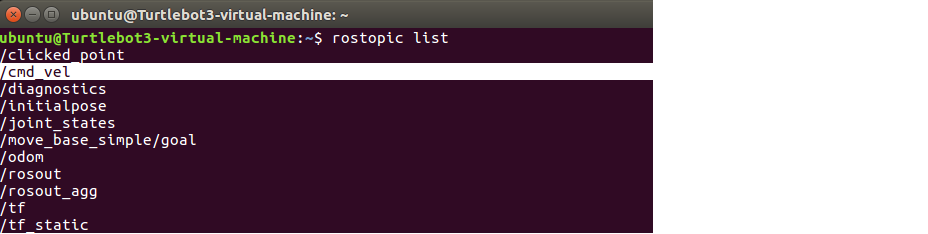
然后launch启动 ,在rviz里配置,
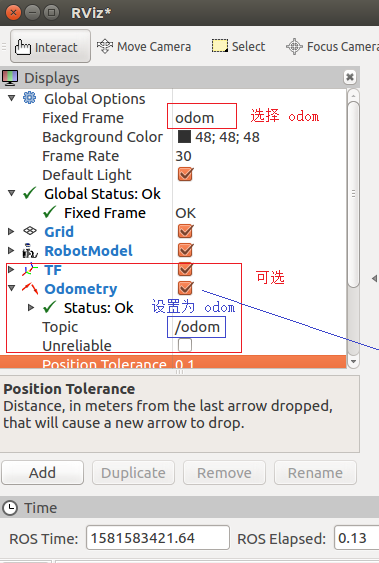
此时调用 rostopic list 会发现一个熟悉的话题: /cmd_vel
运行命令行
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
就可以看到小车动起来了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号