2021.3.12| Ros中的octomap和gridmap包的安装编译并运行例程
昨天配置Ros的octomap和gridmap包,捣鼓了一整天,从早晨到晚上,经历了无数次编译error,试了各种办法……手动git并cmake、make包,重新安装Opencv包、Qt框架,请教大佬重装了Ros(又欠了个人情)...

运行 make -j11 命令后
直到今天下午4点,才彻底解决所有的问题,也弄懂了不少东西。缓一会,借此博客记录一下。
1.平时git clone可以用hub.fastgit.org替换github.com,如下
git clone https://hub.fastgit.org/....
2.分清楚ros里面(opt/ros/melodic/share)的包和catkin_ws/src下的包。前者是通过sudo apt-get install 命令默认安装的位置,后者是源码编译(src下git clone再来个catkin_make...)。
不然的话,命令行往往执行的不是你源码编译,而是ros里面的...,这对大佬来说只是常识,对博主可是走了不少弯路得来的经验...
3.尽量还是使用sudo apt-get install命令行安装。如果要自己写包还是用git clone整个项目,这样结构比较清晰,demo也比较全,暂时是这么认为的。
下面贴一下跑官方demo的结果图吧。
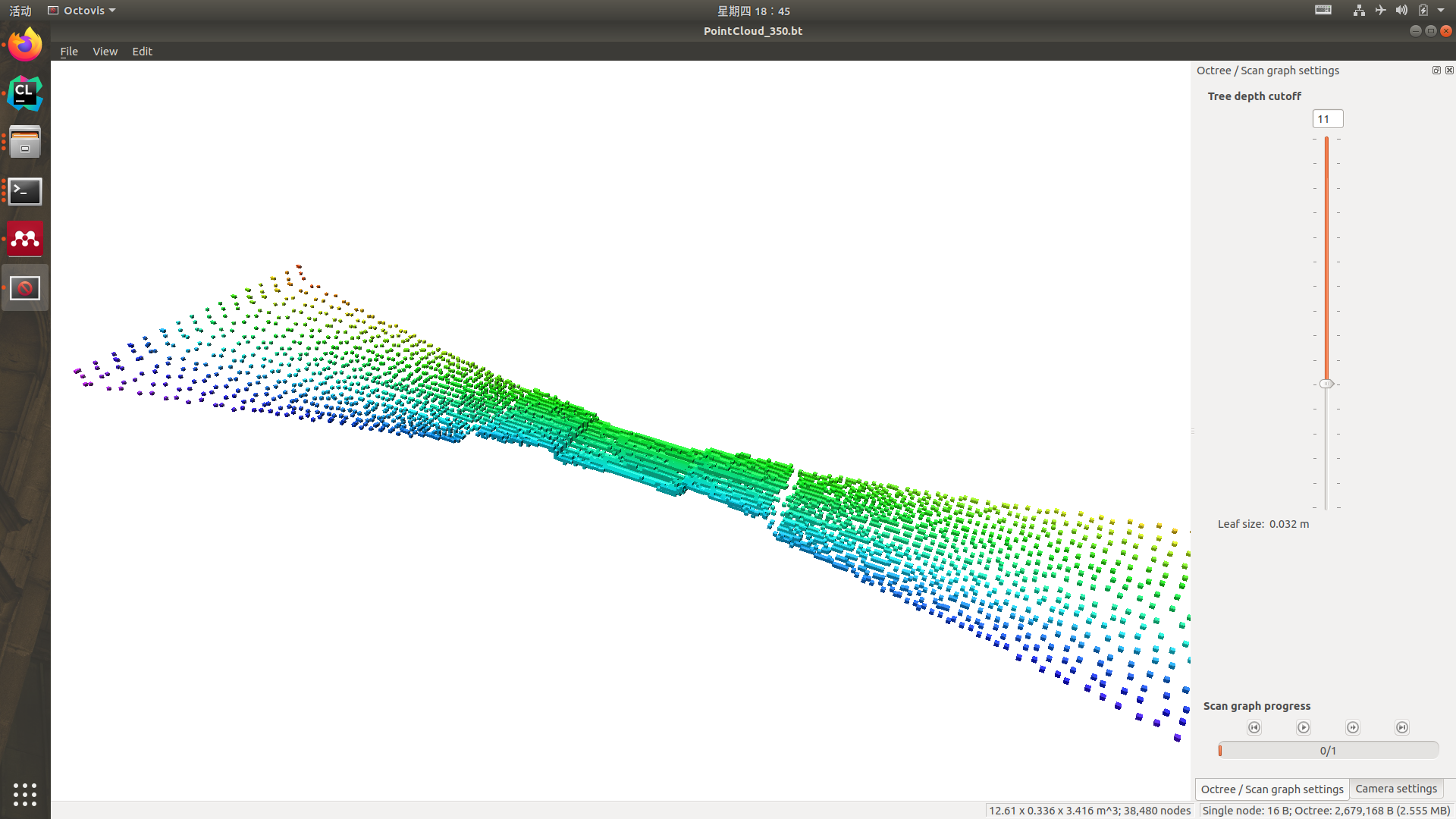
首先是octomap包里的,参考了半闲居士的教程。
运行
octovis octomap/share/data/geb079.bt

参考https://www.cnblogs.com/gaoxiang12/p/5041142.html,.pcd文件转octomap的程序,直接复制代码到Clion下,弄好CMakeLists.txt,编译运行,用了官方自带的数据,如下。
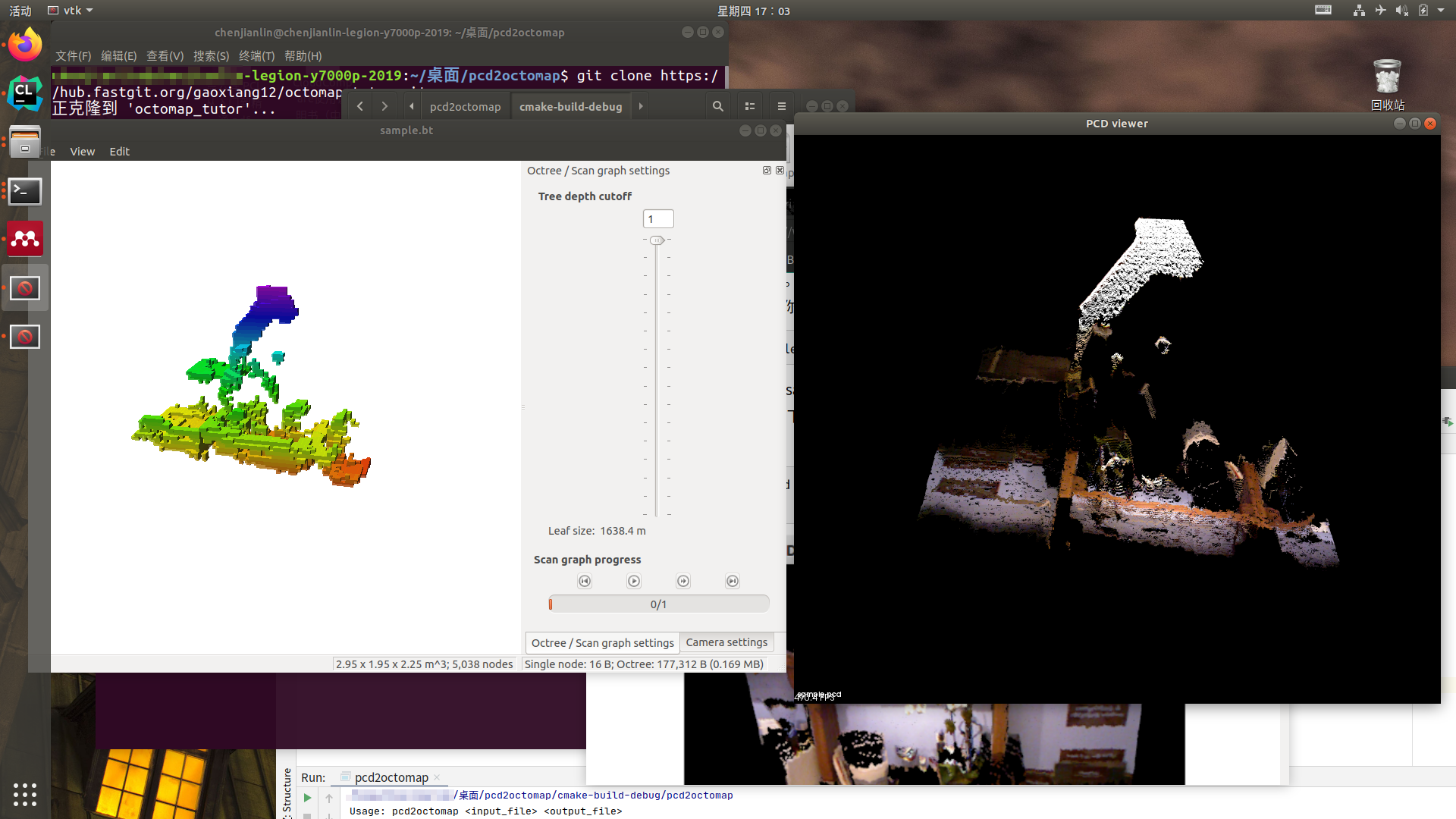
突发奇想,换成我的数据,再跑一下,如下。
额...离理想中的样子还有差距,后续有机会的话再改改。
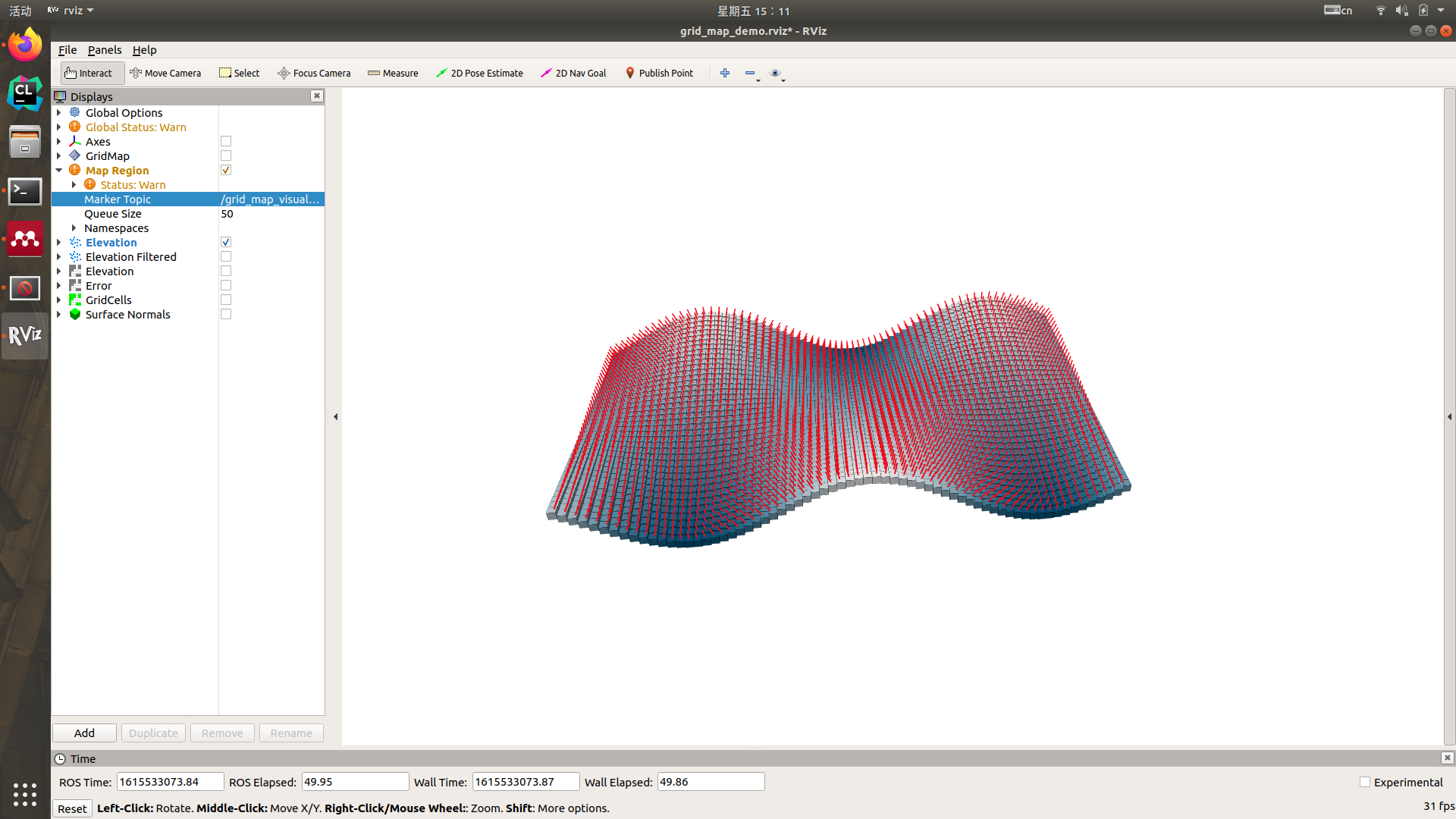
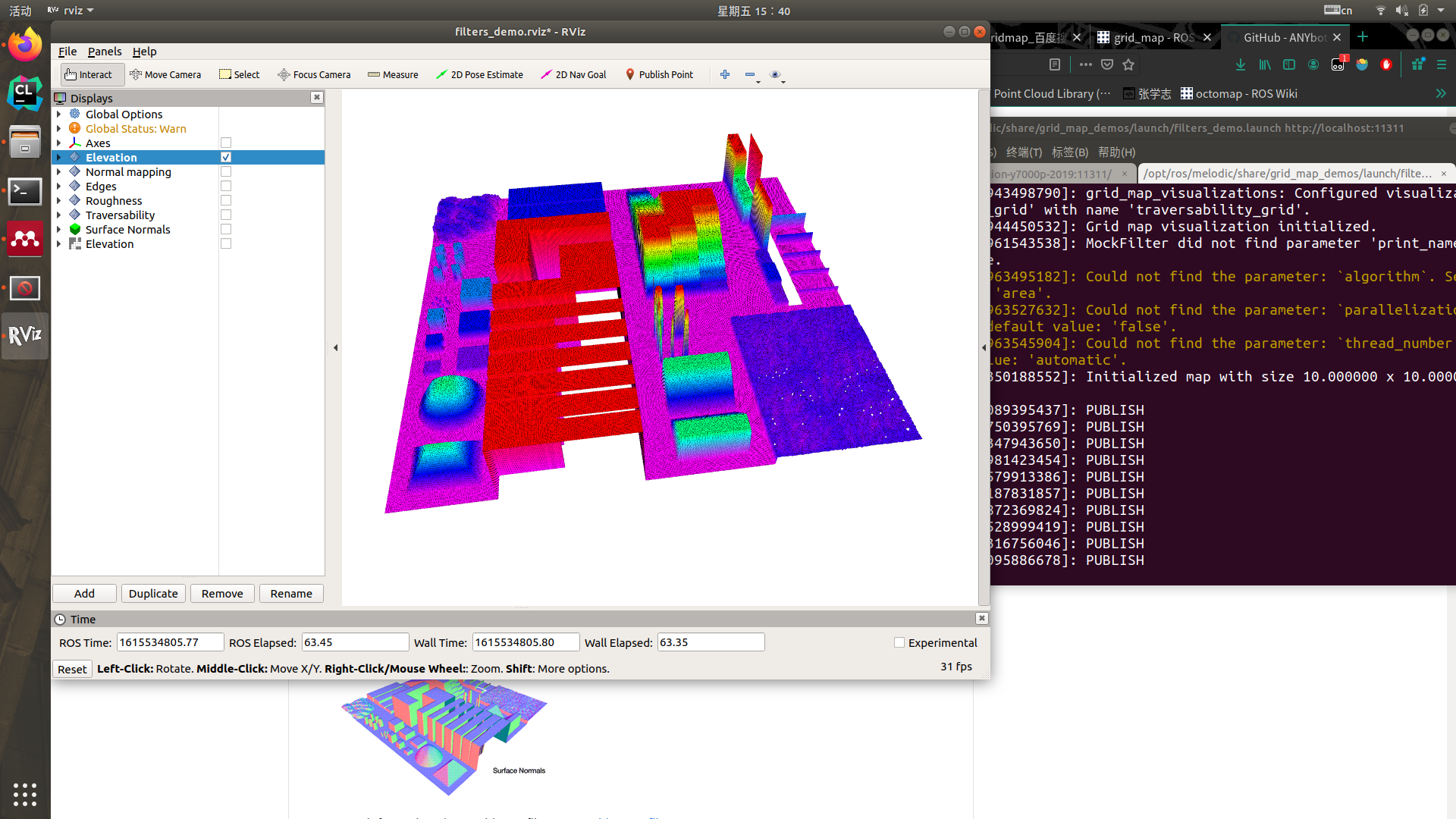
然后就是gridmap包。这个是重点关注的东西,所谓的2.5D的高程图。
照例跑几个例程。参考https://hub.fastgit.org/anybotics/grid_map
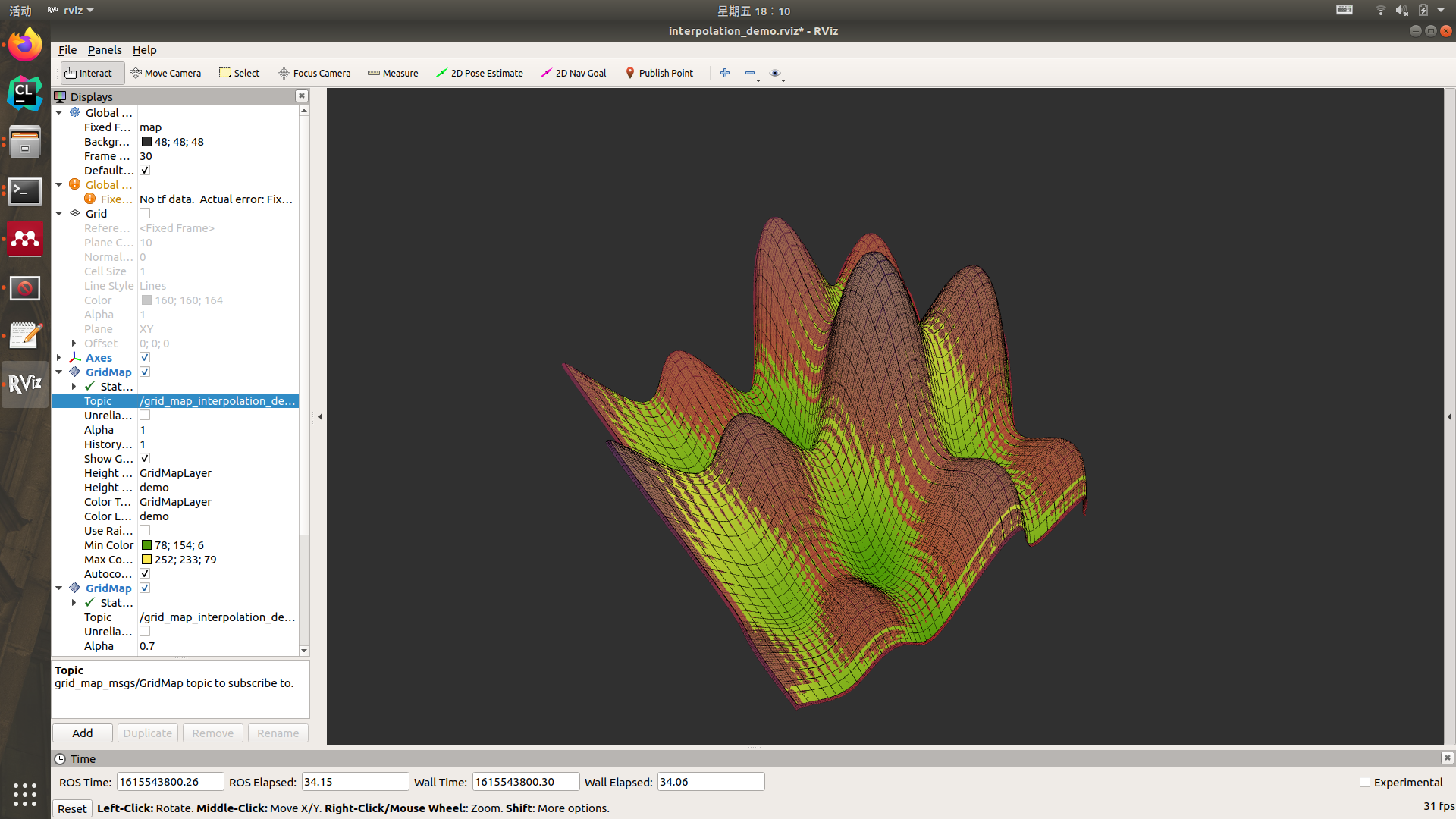
今天就先搞到这里。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号