ROS学习
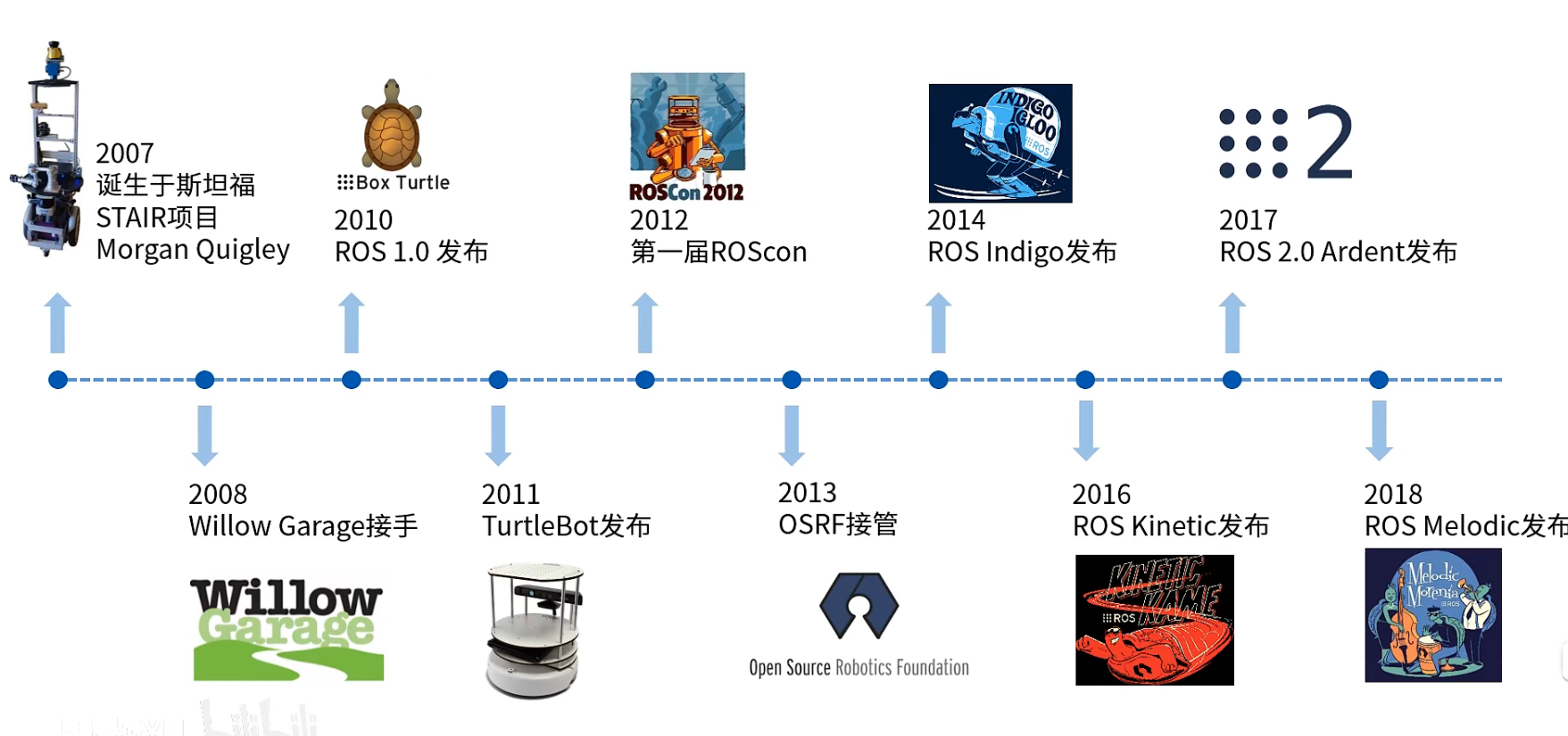
ROS发展史
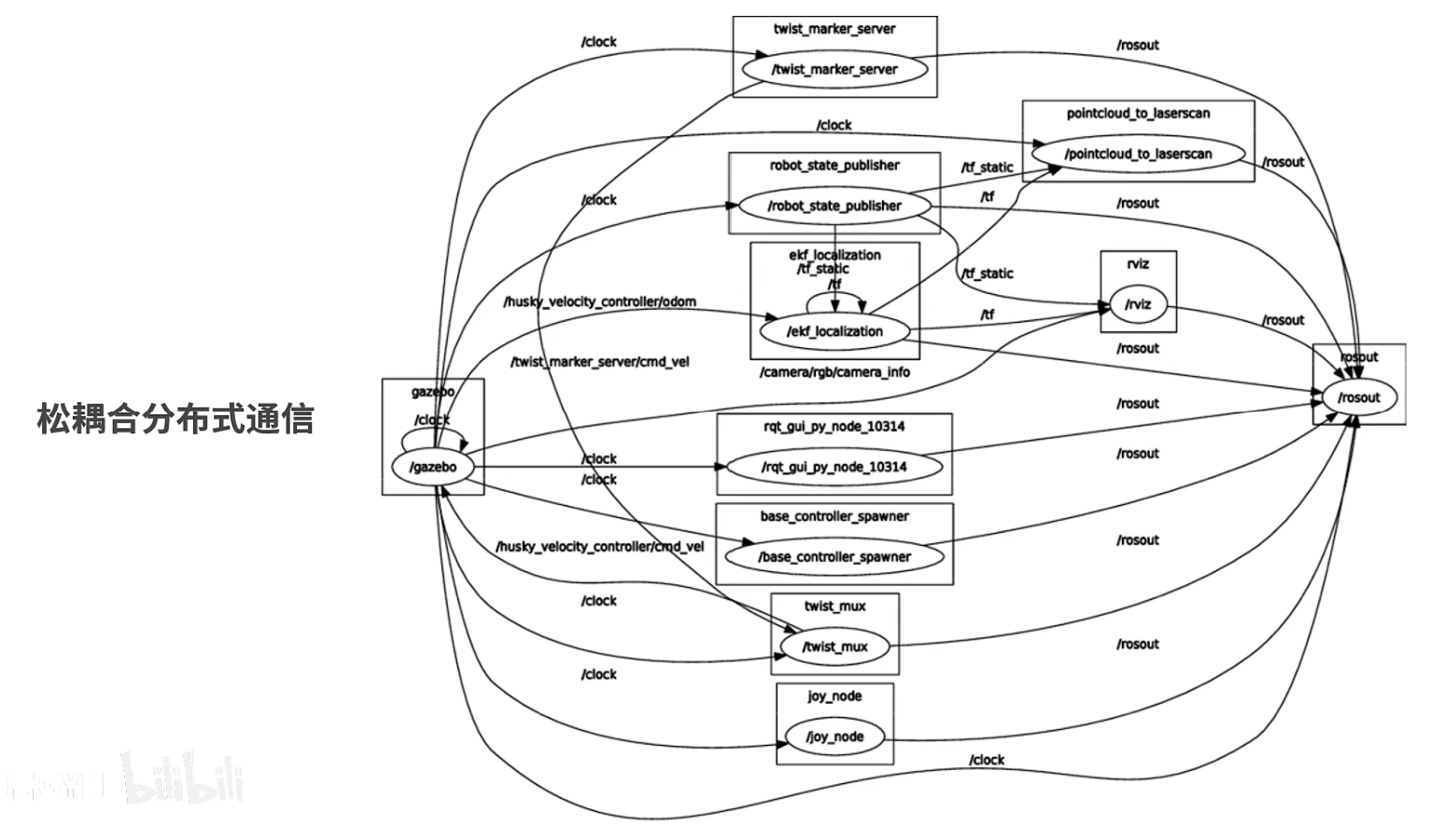
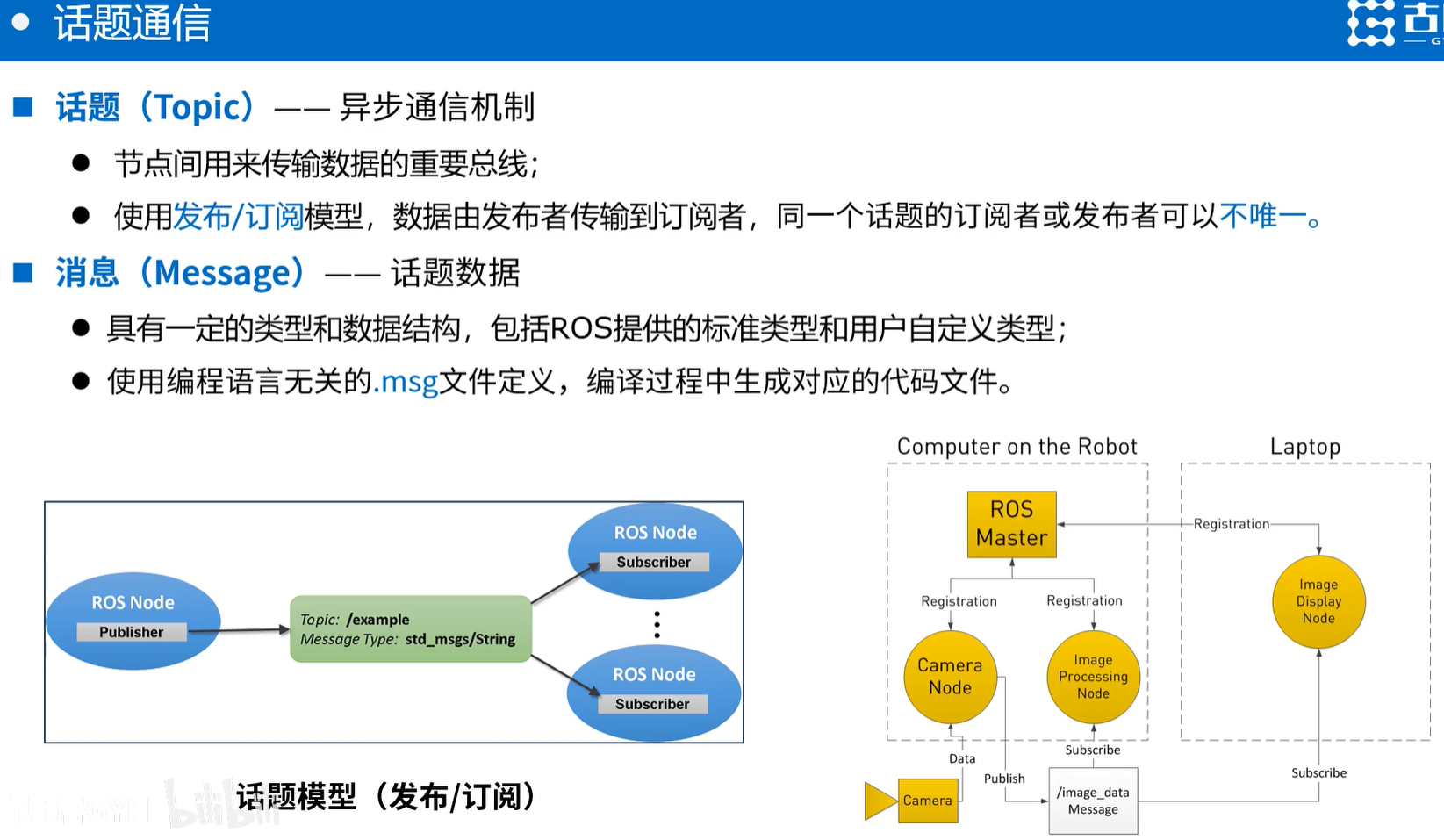
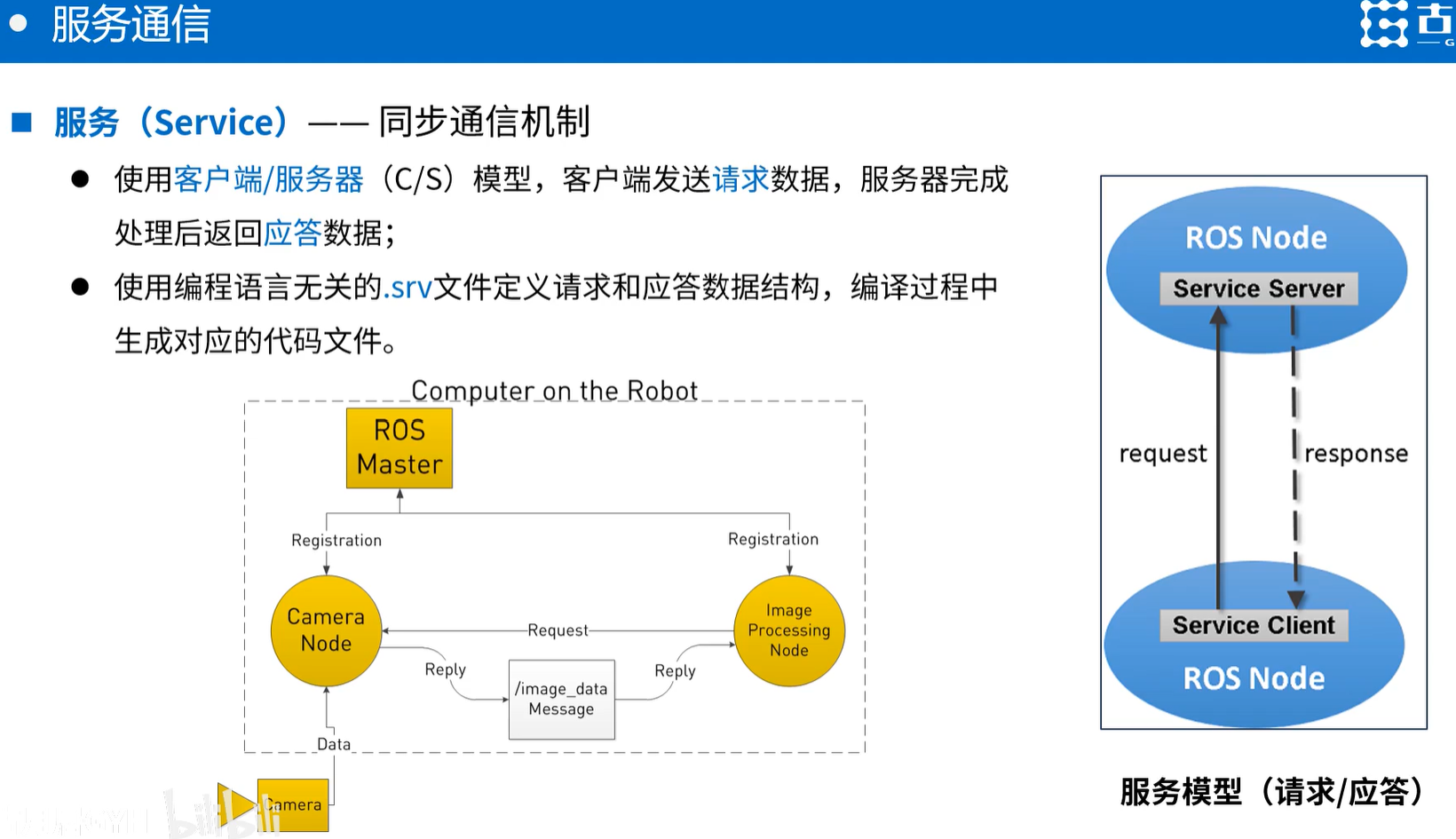
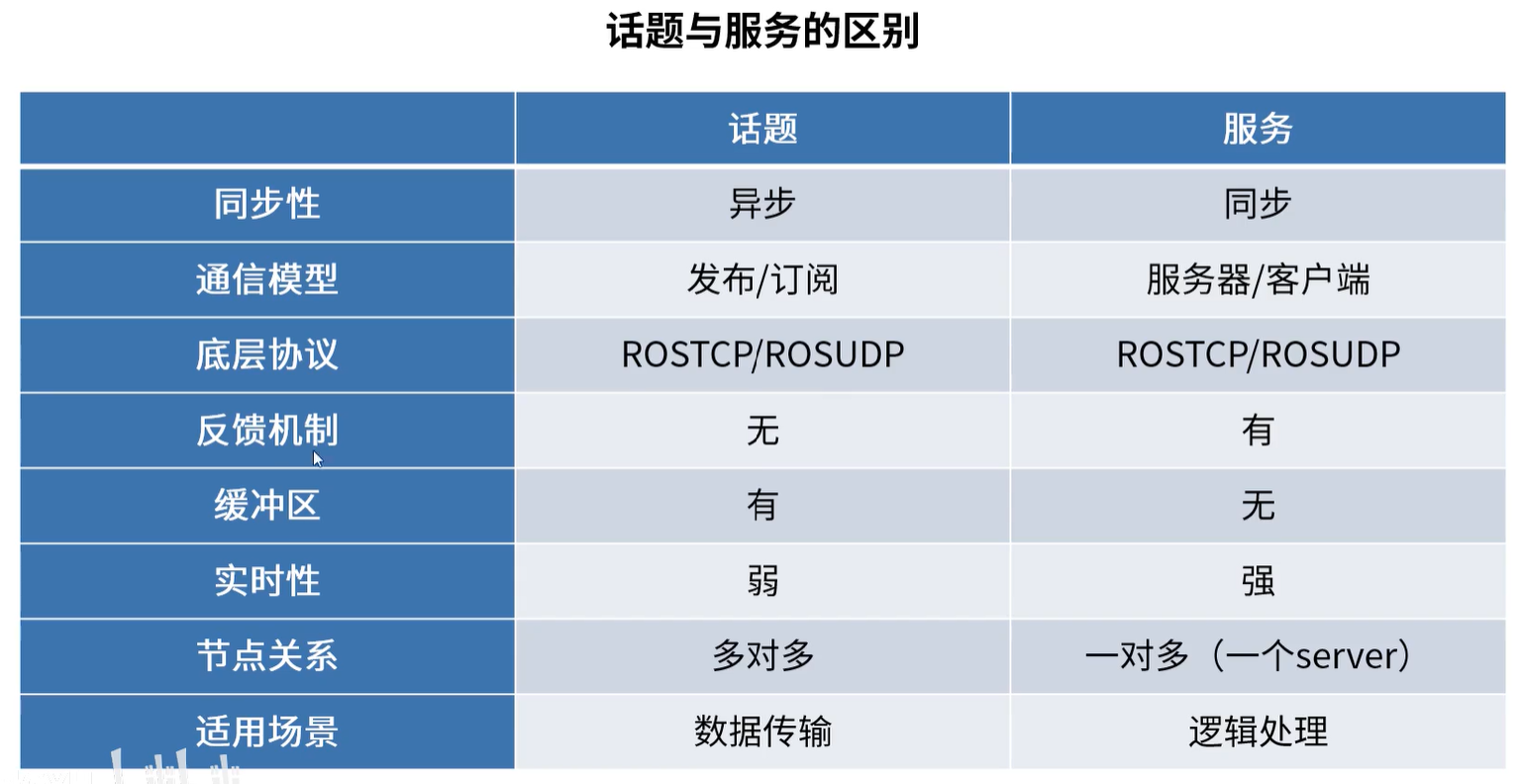
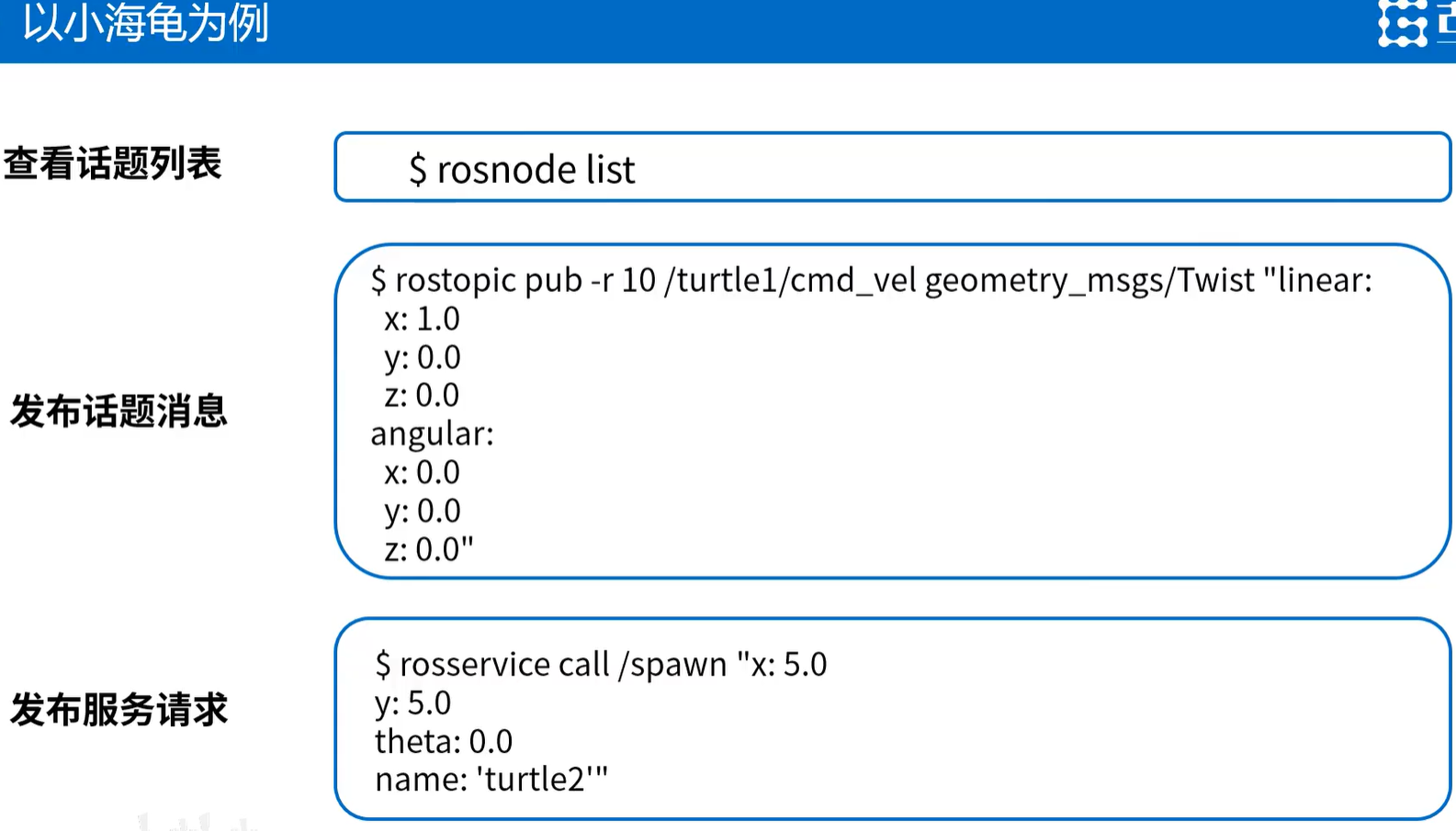
通信计算图:
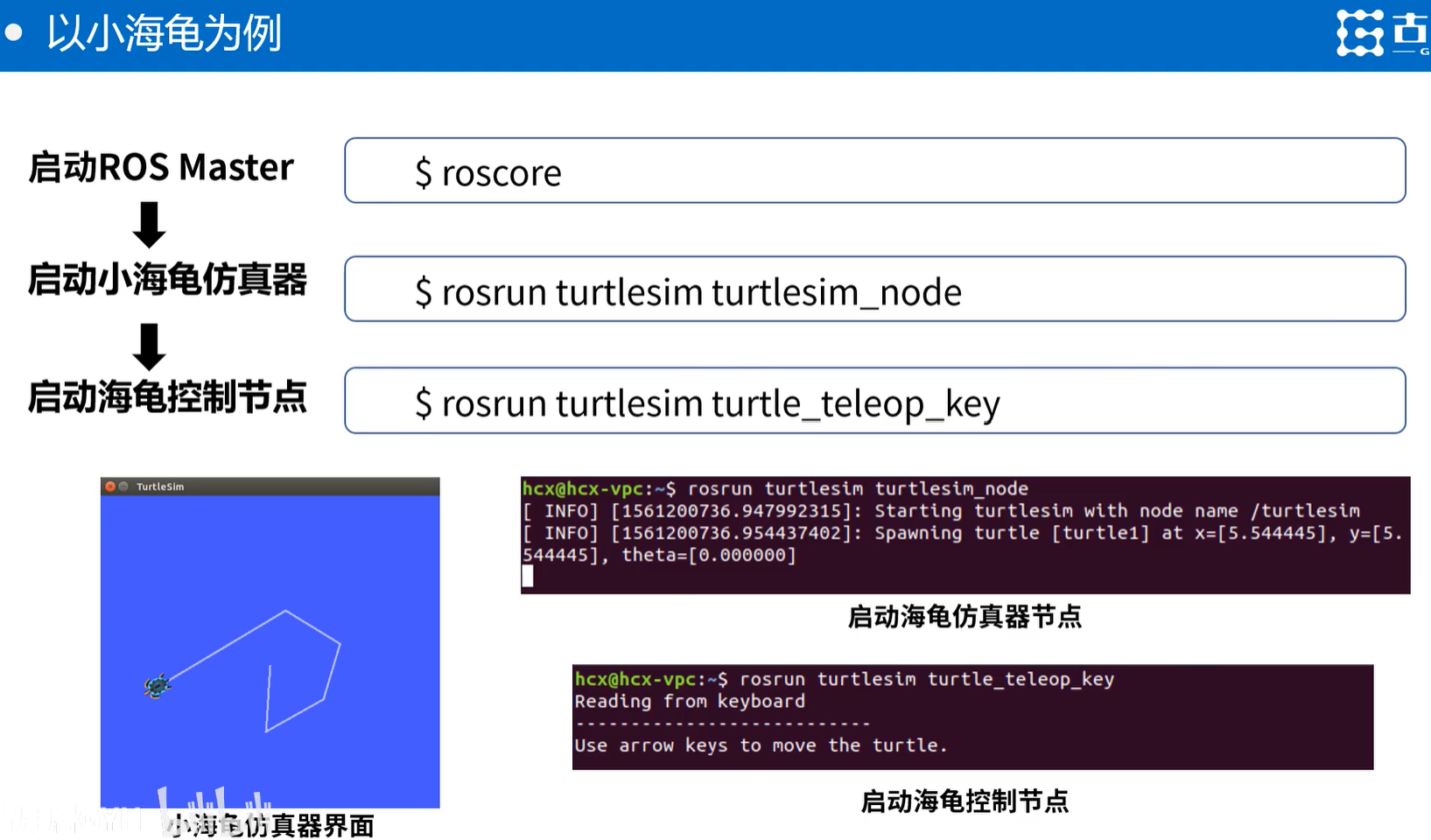
$roscore ##启动ROS Master
$rosrun turtlesim turtlesim_node ##运行功能包中的节点
$rosrun turtlrsim turtle_teleop_key ##运行键盘控制节点
ROS发展史
通信计算图:
$roscore ##启动ROS Master
$rosrun turtlesim turtlesim_node ##运行功能包中的节点
$rosrun turtlrsim turtle_teleop_key ##运行键盘控制节点

 浙公网安备 33010602011771号
浙公网安备 33010602011771号