【Program】Pytorch入门④:TORCHVISION OBJECT DETECTION FINETUNING TUTORIAL
开始前需要有一个准备工作,安装coco的api,主要用到其中的IOU计算的库来评价模型的性能。我折腾了一个晚上加一个上午的时间,在我12年买的老笔记本上,按照网上很多方法还是无法解决。卡在了pycocotools问题上,最终的错误是:e:\anaconda3\include\pyconfig.h(59): fatal error C1083: 无法打开包括文件: “io.h”: No such file or directory。
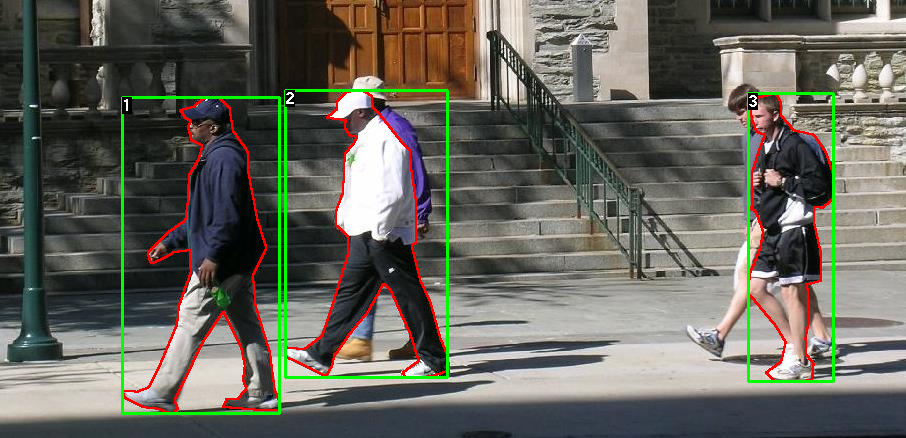
本教程使用Penn-Fudan的行人检测和分割数据集来训练Mask R-CNN实例分割模型。Penn-Fudan数据集中有170张图像,包含345个行人的实例。图像中场景主要是校园和城市街景,每张图中至少有一个行人。
本文参考作者一个菜鸟的奋斗的文章:手把手教你训练自己的Mask R-CNN图像实例分割模型(PyTorch官方教程)。
数据处理
按照官网教程下载好数据集后,可以看到起数据结构,PennFudanPed/readme中有详细的讲解。
PennFudanPed/
PedMasks/
FudanPed00001_mask.png
FudanPed00002_mask.png
FudanPed00003_mask.png
FudanPed00004_mask.png
...
PNGImages/
FudanPed00001.png
FudanPed00002.png
FudanPed00003.png
FudanPed00004.png
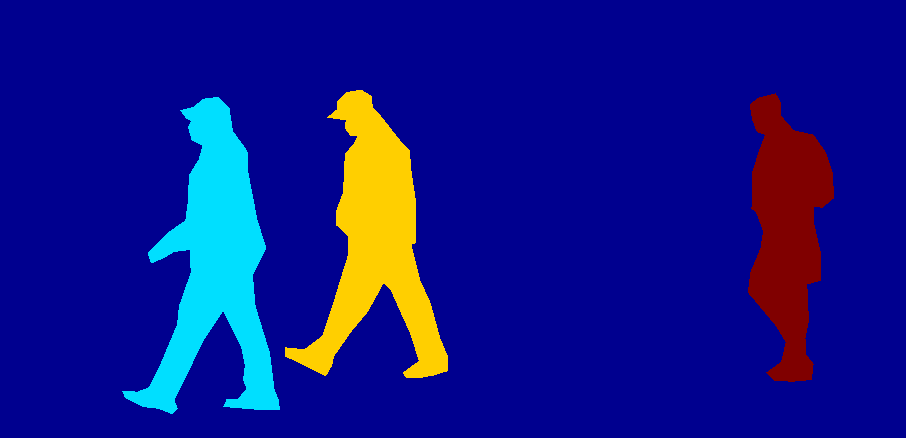
图像如下:
一个菜鸟的奋斗给了数据预览方法:
from PIL import Image
Image.open('PennFudanPed/PNGImages/FudanPed00001.png')
mask = Image.open('PennFudanPed/PedMasks/FudanPed00001_mask.png')
mask.putpalette([
0, 0, 0, # black background
255, 0, 0, # index 1 is red
255, 255, 0, # index 2 is yellow
255, 153, 0, # index 3 is orange
])
mask.show()
在训练模型之前,需要写好数据集的载入接口。其实针对每一个不同的问题,都需要首先做这一步,搭建模型和处理数据是同步进行的。贴上我简要注释的代码:
# -*- coding:utf-8 -*-
#@Time : 2020/2/14 9:13
#@Author: zhangqingbo
#@File : 1_torchvision_object_detection_finetuning.py
import os
import numpy as np
import torch
from PIL import Image
class PennFudanDataset(object):
def __init__(self, root, transforms):
self.root = root
self.transforms = transforms
# load all image files, sorting them to ensure that
# they are aligned
self.imgs = list(sorted(os.listdir(os.path.join(root, "PNGImages"))))
self.masks = list(sorted(os.listdir(os.path.join(root, "PedMasks"))))
def __getitem__(self, idx):
# load images ad masks
img_path = os.path.join(self.root, "PNGImages", self.imgs[idx])
mask_path = os.path.join(self.root, "PedMasks", self.masks[idx])
img = Image.open(img_path).convert("RGB")
# note that we haven't converted the mask to RGB,
# because each color corresponds to a different instance
# with 0 being background
mask = Image.open(mask_path)
# convert the PIL Image into a numpy array
mask = np.array(mask)
# instances are encoded as different colors
obj_ids = np.unique(mask)
# first id is the background, so remove it
obj_ids = obj_ids[1:]
# split the color-encoded mask to a set of binary masks
# 下面这行代码的解释:以FudanPed00001为例,有两个人目标,FudanPed00001_mask中用像素为0表示背景,
# 用1表示目标1,用2表示目标2,以此类推,所以mask是一个559*536的二维矩阵,目标1所占的像素值全为1,
# 目标2的像素值全为2,而obj_ids是取mask中的唯一值,即mask=[1, 2],原来mask=[0, 1, 2],但
# “obj_ids = obj_ids[1:]”已经截掉了元素0.
# 而下面这行代码,创建了masks(2*559*536),包含两个mask(559*536),分别对应第一个目标和第二个目标,
# 第一个mask中,目标1所占像素为True,其余全为False,第二个mask中,目标2所占像素为True,其余全为False。
# 感觉这行代码太骚气!
masks = mask == obj_ids[:, None, None]
# get bounding box coordinates for each mask
num_objs = len(obj_ids)
boxes = []
for i in range(num_objs):
pos = np.where(masks[i])
# pos[0]代表的是第几行,即为纵坐标
# pos[1]代表的是第几列,即为横坐标
xmin = np.min(pos[1])
xmax = np.max(pos[1])
ymin = np.min(pos[0])
ymax = np.max(pos[0])
boxes.append([xmin, ymin, xmax,ymax])
# convert everything into a torch.Tensor
boxes = torch.as_tensor(boxes, dtype=torch.float32)
# there is only one class
labels = torch.ones((num_objs,), dtype=torch.int64)
masks = torch.as_tensor(masks, dtype=torch.uint8)
image_id = torch.tensor([idx])
area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])
# suppose all instances are not crowd
iscrowd = torch.zeros((num_objs,), dtype=torch.int64)
target = {}
target["boxes"] = boxes
target["labels"] = labels
target["masks"] = masks
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
if self.transforms is not None:
img, target = self.transforms(img, target)
return img, target
def __len__(self):
return len(self.imgs)
搭建模型
Mask R-CNN是基于Faster R-CNN改造而来的。Faster R-CNN用于预测图像中潜在的目标框和分类得分,而Mask R-CNN在此基础上加了一个额外的分支,用于预测每个实例的分割mask。
有两种方式来修改torchvision modelzoo中的模型,以达到预期的目的。第一种,采用预训练的模型,在修改网络最后一层后finetune。第二种,根据需要替换掉模型中的骨干网络,如将ResNet替换成MobileNet等。
1. Finetuning from a pretrained model
# if you want to start from a model pre-trained on COCO and want to finetune it for your particular classes.
# Here is a possible way of doing it:
import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
# load a model pre-trained on COCO
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)
# replace the classifier with a new one, that has
# num_classes which is user-defined
num_classes = 2 # 1 class(person) + background
# get number of input features for the classifier
in_features = model.roi_heads.box_predictor.cls_score.in_features
# replace the pre-trained head with a new one
model.roi_head.box_predictor = FastRCNNPredictor(in_features, num_classes)
2. Modifying the model to add a different backbone
# if you want to replace the backbone of the model with a different one。
# 举例来说,默认的骨干网络(ResNet-50)对于某些应用来说可能参数过多不易部署,可以考虑将其替换成更轻量的网络(如MobileNet)
# Here is a possible way of doing it:
import torchvision
from torchvision.models.detection import FasterRCNN
from torchvision.models.detection.rpn import AnchorGenerator
# load a pre-trained model for classification and return only the features
backbone = torchvision.models.mobilenet_v2(pretrained=True).features
# FasterRNN needs to know the number of output channels in a backbone.
# For mobilenet_v2, it's 1280, so we need to add it here
backbone.out_channels = 1280
# let's make the RPN generate 5 x 3 anchors per spatial
# location, with 5 different sizes and 3 different aspect
# ratios. We have a Tuple[Tuple[int]] because each feature
# map could potentially have different sizes and
# aspect ratios
anchor_generator = AnchorGenerator(sizes=((32, 64, 128, 256, 512),),
aspect_ratios=((0.5, 1.0, 2.0),))
# let's define what are the feature maps that we will
# use to perform the region of interest cropping, as well as
# the size of the crop after rescaling.
# if your backbone returns a Tensor, featmap_names is expected to
# be [0]. More generally, the backbone should return an
# OrderedDict[Tensor], and in featmap_names you can choose which
# feature maps to use.
roi_pooler = torchvision.ops.MultiScaleRoIAlign(featmap_names=[0],
output_size=7,
sampling_ratio=2)
# put the pieces together inside a FasterRCNN model
model = FasterRCNN(backbone,
num_classes=2,
rpn_anchor_generator=anchor_generator,
box_roi_pool=roi_pooler)
本文的目的是在PennFudan数据集上训练Mask R-CNN实例分割模型,即上述第一种情况。在torchvision.models.detection中有官方的网络定义和接口的文件,可以直接使用。
import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
from torchvision.models.detection.mask_rcnn import MaskRCNNPredictor
def get_model_instance_segemention(nun_classes):
# load an instance segmentation model pre-trained pre-trained on COCO
model = torchvision.models.detection.maskrcnn_resnet50_fpn(pretrained=True)
# get number of input features for the classifier
in_features = model.roi_heads.box_predictor.cls_score.in_features
# replace the pre-trained head with a new one
model.roi_heads.box_predictor = FastRCNNPredictor(in_features, num_classes)
# now get the number of input features for the mask classifier
in_features_mask = model.roi_heads.mask_predictor.conv5_mask.in_channels
hidden_layer = 256
# num_classes = 2 # 1 class(person) + background
# and replace the mask predictor with a new one
model.roi_heads.mask_predictor = MaskRCNNPredictor(in_features_mask,
hidden_layer,
num_classes)
return model
"""
在PyTorch官方的references/detection/中,有一些封装好的用于模型训练和测试的函数.
其中references/detection/engine.py、references/detection/utils.py、references/detection/transforms.py是我们需要用到的。
首先,将这些文件拷贝过来.这一步也是折腾半天,官网教程没有说的很清楚,原来是在GitHub/Pytorch里面有一个vision模块,里面包含了utils.py,transform.py
h和engine.py这些文件。
# Download TorchVision repo to use some files from references/detection
>>git clone https://github.com/pytorch/vision.git
>>cd vision
>>git checkout v0.4.0
>>cp references/detection/utils.py ../
>>cp references/detection/transforms.py ../
>>cp references/detection/coco_eval.py ../
>>cp references/detection/engine.py ../
>>cp references/detection/coco_utils.py ../
"""
3. 数据增强/转换
import transforms as T
def get_transform(train):
transforms = []
transforms.append(T.ToTensor())
if train:
transforms.append(T.RandomHorizontalFlip(0.5))
return T.Compose(transforms)
4. 训练(我没训练成功)
数据集、模型、数据增强的部分都已经写好。在模型初始化、优化器及学习率调整策略选定后,就可以开始训练了。
这里,设置模型训练10个epochs,并且在每个epoch完成后在测试集上对模型的性能进行评价。
from engine import train_one_epoch, evaluate
import utils
def main():
# train on the GPU or on the CPU, if a GPU is not available
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
# our dataset has two classes only - background and person
num_classes = 2
# use our dataset and defined transformations
dataset = PennFudanDataset('PennFudanPed', get_transform(train=True))
dataset_test = PennFudanDataset('PennFudanPed', get_transform(train=False))
# split the dataset in train and test set
indices = torch.randperm(len(dataset)).tolist()
dataset = torch.utils.data.Subset(dataset, indices[:-50])
dataset_test = torch.utils.data.Subset(dataset_test, indices[-50:])
# define training and validation data loaders
data_loader = torch.utils.data.DataLoader(
dataset, batch_size=2, shuffle=True, num_workers=4,
collate_fn=utils.collate_fn)
data_loader_test = torch.utils.data.DataLoader(
dataset_test, batch_size=1, shuffle=False, num_workers=4,
collate_fn=utils.collate_fn)
# get the model using our helper function
model = get_model_instance_segmentation(num_classes)
# move model to the right device
model.to(device)
# construct an optimizer
params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.SGD(params, lr=0.005,
momentum=0.9, weight_decay=0.0005)
# and a learning rate scheduler
lr_scheduler = torch.optim.lr_scheduler.StepLR(optimizer,
step_size=3,
gamma=