CC2530学习路线-基础实验-GPIO 按键控制LED灯亮灭(2)
1.前期预备知识
1.1 新大陆Zigbee模块按键电路图
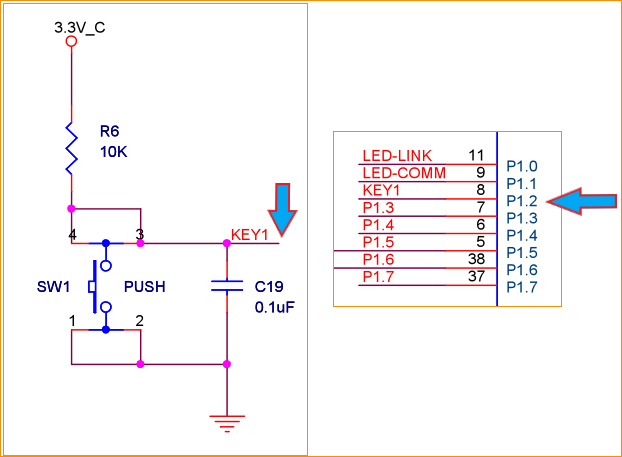
由上图可知,Zigbee模块的SW1按钮连接在P1.2端口上,当SW1导通,P1.2电平从3.3V被拉低接地。所以P1.2输入模式为下拉输入.
1.2 CC2530相关寄存器
| 寄存器名称 | 寄存器作用 | 寄存器描述 |
|---|---|---|
| P1 (0x90) | *控制端口1的高低电平 | 端口1.通用I/O。可以通过SFR位寻址 |
| P1SEL (0xF4) | 端口1 8个子端口的功能选择 | P1SEL的8个bit分别代表 => P1.7~P1.0的功能选择. 值为 0:代表通用I/0(GPIO)功能. 值为 1 : 代表外设功能 |
| P1DIR (0xFE) | 端口1 输入输出选择 | P1DIR的bit定义同P1SEL; 值为 0:代表从外部输入信号至CC2530; 值为 1:代表从CC2530输出信号至外部 |
| P1INP (0xF6) | 端口1 输入模式选择 | P1INP定义为P1.7~P1.2的I/O输入模式。其中P1.0和P1.1是没有上拉/下拉功能。 值为 0:上拉/下拉。 值为 1:三态(高电平、低电平、高阻态) |
| P2INP (0xINP) | 端口2 输入模式及其它端口选择 | P2INP比较特殊,因为P2端口引出的引脚只有3个,所以P2INP还有其它功能。 bit 0 ~ 4 : P2.4~P2.0的输入模式。 0 : 上拉/下拉; 1:三态 bit 5 : 设置端口0上拉/下拉选择。对端口P0上面的所有引脚设置为上拉/下拉输入 0 : 上拉; 1 : 下拉 bit 6 : 同bit 5功能,但是是设置端口1上所有引脚 bit 7 : 同bit5功能,但是是设置端口2上的所有引脚 |
| P1IEN (0x8D) | 端口1 中断屏蔽 | 端口P1.7~P1.0的中断使能(也就是说中断是否Enable*(打开)) 0 : 中断禁用 1 : 中断使能 |
| PICTL (0x8C) | 端口中断控制 P0ICON(bit0) | 端口0、1、2输入模式下的中断配置。 0 : 输入的上升沿引起中断 1 : 输入的下降沿引起中断 |
| P1IFG (0x8A) | 端口0 中断状态标志 | 端口0,bit7 ~ 0输入中断状态标志。当输入端口中断请求后,其相应的标志位将会被置为1. |
| IEN2 (0x9A) | 中断使能1 P0IE(bit5) | 端口1中断使能 0 : 中断禁止 1 : 中断使能 |
| EA | 中断的总开关 | 只有打开该开关,中断才能传入51芯片 0 : 中断禁止 1 : 中断使能 |
1.3 CC2530中断走向图
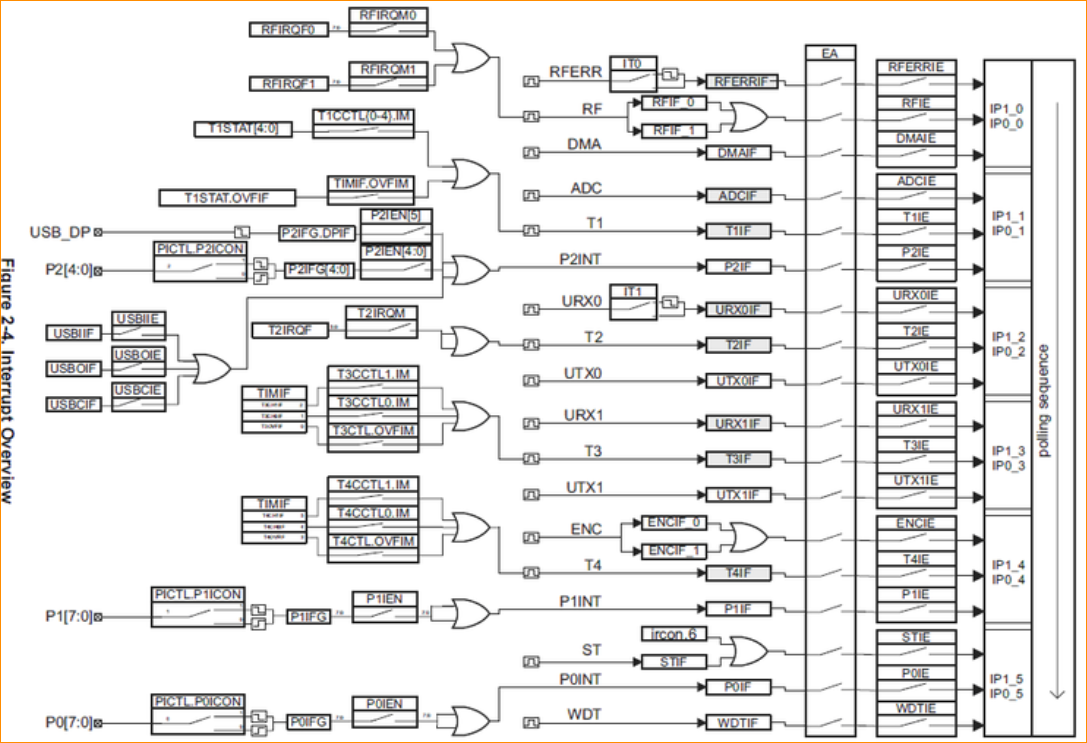
如上图所示,如果P1端口发生中断,需要传入51内核中,流程如下图所示.

所以,我们对中断进行初始化的一个流程也和上图一样,一层一层的将中断使能开关打开。
1.4 使用C语言为51单片机编写中断程序
使用C语言为51单片机编写中断程序,有一个特殊的函数声明形式。如以下代码所示:
#pragma vector = 中断向量地址
__interrupt void P01_ISR(void)
{
/*Do something*/
}
其中中断向量地址,可以在ioCC2530.h头文件中找到,可以直接使用宏定义字符替换。
/* --------------------------------------------------------------------------
* Interrupt Vectors
* --------------------------------------------------------------------------
*/
#define RFERR_VECTOR VECT( 0, 0x03 ) /* RF TX FIFO下溢和RX FIFO溢出*/
#define ADC_VECTOR VECT( 1, 0x0B ) /* ADC转换结束*/
#define URX0_VECTOR VECT( 2, 0x13 ) /* USART0 RX完成*/
#define URX1_VECTOR VECT( 3, 0x1B ) /* USART1 RX完成*/
#define ENC_VECTOR VECT( 4, 0x23 ) /* AES加密/解密完成*/
#define ST_VECTOR VECT( 5, 0x2B ) /* 睡眠定时器比较*/
#define P2INT_VECTOR VECT( 6, 0x33 ) /* 端口2输入*/
#define UTX0_VECTOR VECT( 7, 0x3B ) /* USART0 TX完成*/
#define DMA_VECTOR VECT( 8, 0x43 ) /* DMA传输完成*/
#define T1_VECTOR VECT( 9, 0x4B ) /* 定时器1(16位)捕捉/比较/溢出 */
#define T2_VECTOR VECT( 10, 0x53 ) /* 定时器2(MAC定时器)*/
#define T3_VECTOR VECT( 11, 0x5B ) /* 定时器3(8位)捕捉/比较/溢出*/
#define T4_VECTOR VECT( 12, 0x63 ) /* 定时器4(8位)捕捉/比较/溢出*/
#define P0INT_VECTOR VECT( 13, 0x6B ) /* 端口0输入*/
#define UTX1_VECTOR VECT( 14, 0x73 ) /* USART1 TX完成*/
#define P1INT_VECTOR VECT( 15, 0x7B ) /* 端口1输入*/
#define RF_VECTOR VECT( 16, 0x83 ) /* 射频通用中断*/
#define WDT_VECTOR VECT( 17, 0x8B ) /* 定时器模式下看门狗溢出*/
1.5 *函数指针
本节为选择学习内容,是笔者在学习按键中断时,思考的一个问题。想实现高级语言中事件机制,在高级语言中事件主要是靠方法指针和观察者设计模式一并完成。方法指针就是一个指向方法的指针。而C语言中的指针一样可以指向一个函数。如:
例1,简单的事件实现,函数指针。
#include <ioCC2530.h>
typedef unsigned int uint;
/************************/
void (*timer_ow)(); // 定义一个返回值为void参数为空的函数指针
int (*timer_ow1)(); // 定义一个返回值为int参数为void的函数指针
int (*timer_ow2)(int); // 定义一个返回值为int参数为int的函数指针
/************************/
void timer_Overflow(void)
{
/*Do something*/
}
int timer_Overflow1(void)
{
/*Do something*/
}
int timer_Overflow2(int z)
{
/*Do something*/
}
void main(void)
{
// 将函数timer_Overflow赋值给函数指针timer_ow
timer_ow = timer_Overflow;
// 调用函数指针
(*timer_ow)();
timer_ow1 = timer_Overflow1;
int result = (*timer_ow1)();
timer_ow2 = timer_Overflow2;
result = (*timer_ow2)(result);
}
2. 程序代码
#include <ioCC2530.h>
// 初始化通用端口
void init_gpio(void)
{
// 将p1_0,1,2设置成GPIO
P1SEL &=~ 0x07;
// 将p1_0,1设置成输出
P1DIR |= 0x03;
// 将p1_2设置成输入
P1DIR &=~ 0x04;
// 下拉P1全部端口,使LED全灭
P1 = 0x00;
// 设置端口1为上下拉功能
P1INP &=~ 0x04;
// 设置端口1输入模式为上拉
P2INP &=~ 0x40;
}
// 初始化通用端口中断
void init_gpio_interrupt(void)
{
// 将P1设置为输入下降沿引起中断
PICTL |= 0x02;
// 设置P1引脚2为中断使能
P1IEN |= 0x04;
// 设置端口P1为中断使能
IEN2 |= 0x10;
// 打开中断总开关
EA = 1;
//清空中断标志
P1IFG = 0;
P1IF = 0;
}
#pragma vector = P1INT_VECTOR
__interrupt void P1_ISR(void)
{
// 判断中断信号是否从P1.2 SW1引脚发生
if(P1IFG == 0x04)
{
// 让LED翻转
P1_0 = ~P1_0;
P1_1 = ~P1_1;
}
// 清空中断标志
P1IFG = 0;
P1IF = 0;
}
void main()
{
init_gpio();
init_gpio_interrupt();
while(1){;}
}
代码并没有特别困难的地方,根据前面的预备知识和流程图基本可以看得懂。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号