PID算法介绍和公式推导
PID算法概念
PID控制是一种常见的反馈控制算法,其名称来源于其使用的三个控制参数:比例(Proportional)、积分(Integral)和微分(Derivative)。
PID控制算法的目标是根据控制误差(即期望值与实际值之间的差异)来调整控制器输出,以使其尽可能接近期望值。
相关术语介绍
反馈:系统的输出成为输入的部分,反过来作用于系统本身,从而影响系统的输出,反馈分正反馈和负反馈。
开环:输入信号决定输出,输出不会影响系统输入。无反馈。
闭环:输出信号会被用来作为输入的一部分(反馈),输出影响系统的输入。
PID三个参数的作用
比例\(K_{p}\): P就是比例的意思。\(K_{p}\)越大,调节作用越激进,也就是说当前值和目标值相差较大时,可以将\(K_{p}\)调大,其实我们可以类比弹簧的运动。当物体距离平衡位置越远时,回复力越大,\(K_{p}\)起到的作用就相当于是回复力的作用。
微分\(K_{d}\): 可以设想一个弹簧:在平衡位置上,拉他一下,然后松手。这时候它会开始震荡,如果阻力很小,它会震荡很长时间才能重新停在平衡位置。
但如果我们给它一个阻尼作用,使得越接近目标时P的作用越柔和,也就是说K的作用就是刹住物理量的变化。
积分\(K_{i}\): 之前讨论的都是较为理想的情况,但现实生活中总会产生静态误差,比如给水加热时存在散热,汽车行驶时存在摩擦,因此如果只考虑P和D,最后达到的稳态很可能和预期的稳态存在一定偏差。这时候就需要引入
三者对应的时间关系: 专注现在(P)、总结过去(I)、预测未来(D)
比例环节:着眼于当下误差。
积分环节:累计过去所有误差,积分环节将过去的所有误差累加,最后乘以一个系数K_{i}。
微分环节:预测下一时刻误差。微分环节对当前时刻的误差求导,从而”预测”下一时刻的误差。在离散环境下,其数值等于此时的误差减去上一时刻的误差。
PID相关的数学公式和应用
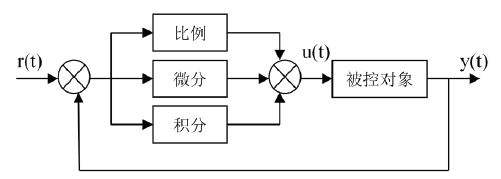
\(r(t)\)是要稳定的值。
\(y(t)\)是当前输出值。
\(e(t) = r(t) - y(t)\)
输入\(r(t)\)与输出\(y(t)\)进行比较,其差值\(e(t)\)经过PID控制器调整后输出电压控制信号\(u(t)\),\(u(t)\)经过被控对象后输出\(y(t)\)。
PID算法的标准式:
t表示从开始调节到输出当前控制量所经过的时间间隔。
由于计算机只能处理数字信号,故将连续信号连续化,采样周期为T:
继续化简
\(\bullet\) 比例系数\(K_{P}\)
\(\bullet\) 积分系数\(K_{i}\)
\(\bullet\) 微分系数\(K_{D}\)
一种pid的简单实现代码如下
float location_pid_realize(_pid *pid, float actual_val)
{
//计算目标值与实际值的误差
pid->err=pid->target_val-actual_val;
pid->integral += pid->err; // 误差累积
//PID算法实现
pid->actual_val = pid->Kp*pid->err
+pid->Ki*pid->integral
+pid->Kd*(pid->err-pid->err_last);
//误差传递
pid->err_last=pid->err;
//返回当前实际值
return pid->actual_val;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号