
为你的STM32毕设项目加点“料”:"AI智能桌面伙伴"姿态识别应用系统
每年的这个时候,总能看到许多为毕业设计而发愁的同学。大家手里握着熟悉的STM32,知道它性能强大、控制精准,是完成毕设的可靠伙伴,但恰恰因为这份“可靠”,反而让选题变得困难——能做的东西似乎都被人做过了,怎样才能让项目既有技术含量,又有些新意,足以让人眼前一亮呢?
我们意识到,问题的关键或许不在于STM32本身,而在于如何为它加点“料”——如何让它与更前沿的技术结合起来。如今,“万物互联”与“人工智能”已不再是遥远的概念,它们正越来越多地出现在实际应用中。那么,何不让我们的STM32项目,也尝试具备联网、上云,甚至一点简单的“思考”能力?
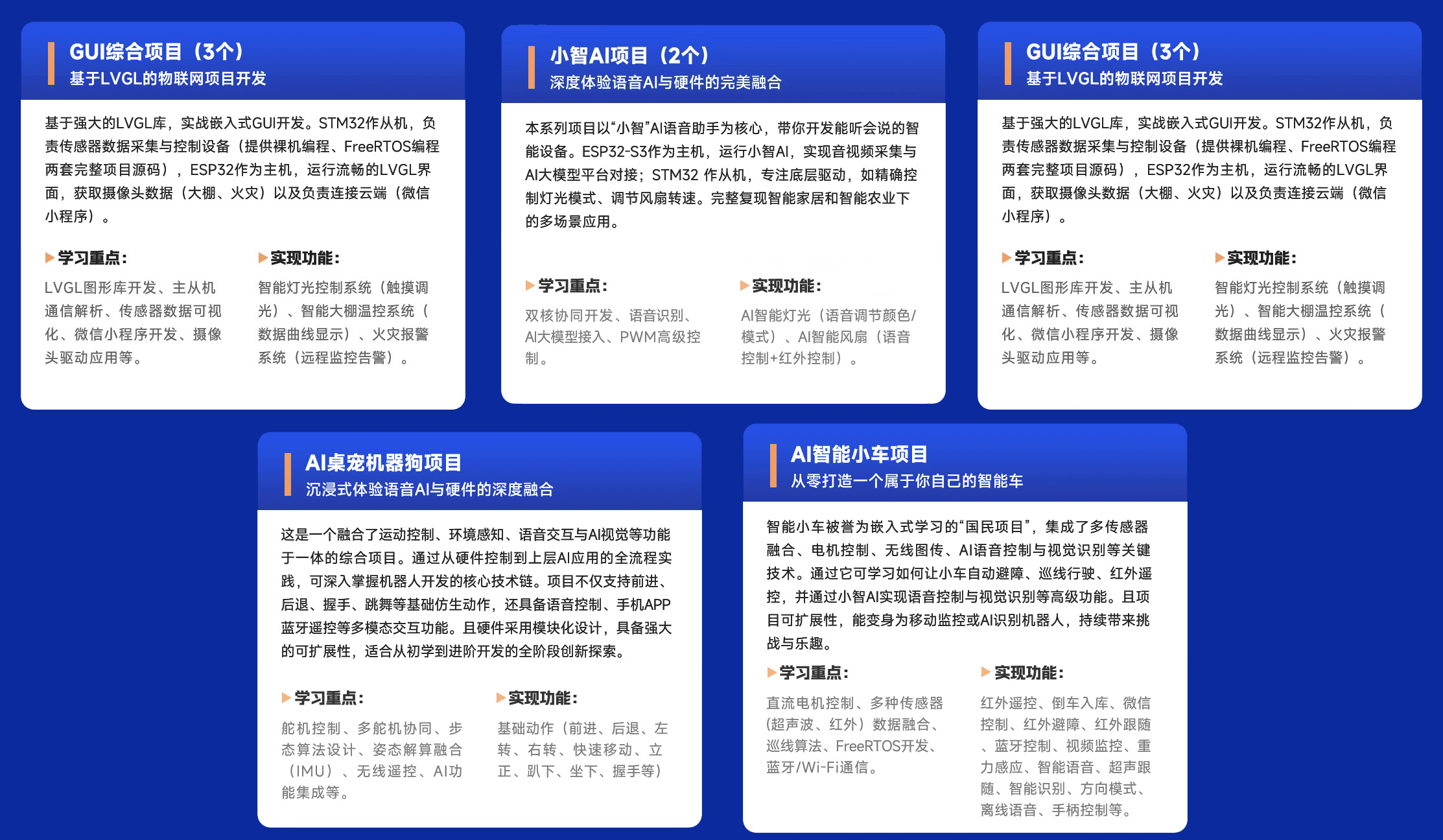
这个想法,正是我们筹划这一系列分享的初衷。我们希望能为你们的毕业设计,提供一些不同的思路和具体的参考,增加一些创新点。在接下来的时间里,我们会陆续带来从易上手的AI趣味小应用,到综合性项目的讲解,包括13个AI入门应用项目、2个小智AI项目、3个LVGL综合项目、一个AI桌宠机器狗,以及那个经典的、国民级嵌入式项目——AI智能小车。
本篇就让我们从这个系列开始,先从13个AI入门应用讲起。项目本身不复杂,但它能让你直观地感受到,当STM32和AI技术结合起来后,能实现哪些不一样的功能。
《AI智能桌面伙伴》
01 项目应用场景
人机交互新方式
趣味智能桌面助手
姿态识别应用场景
02 项目功能
本项目实现了基于姿态识别的拟人化语音交互系统。用户通过语音指令("你现在什么状态啊"、"你现在在干嘛啊")查询设备状态,STM32通过QMI8658六轴姿态传感器采集加速度/角速度数据,计算欧拉角,根据角度阈值判断设备姿态(躺着/站着/倒立/左倒/右倒)。ESP32接收姿态编码,映射为拟人化状态,生成趣味语音反馈。系统采用双芯架构:ESP32负责语音交互,STM32负责姿态识别和编码。整个系统实现了从姿态感知、状态判断到拟人化反馈的完整交互流程,赋予设备拟人化性格,增强用户交互体验。

03 项目硬件平台
主硬件平台:华清远见F103&ESP32-S3 AI开发板(板载麦克风、扬声器、6轴姿态传感器)+2.8寸显示屏。

关于华清远见F103&ESP32-S3 AI开发板:
这是一款能让你的STM32项目瞬间拥有联网和AI能力的双核开发板,集成了STM32F103和ESP32-S3。两个核心都可以独立运行,也可以协同工作。对于初学者来说,你可以把它当成两块板子来分别学习(STM32F103开发板+ESP32-S3开发板)。对于项目实战来说,可以让它们分工合作——ESP32作为“AI大脑”,STM32作为“控制双手”,低成本实现更复杂、更稳定的高级应用。
04 项目实现关键点
1.姿态传感器数据采集 :通过I2C接口(PB6/SCL,PB7/SDA)读取QMI8658的3轴加速度和角速度
2.欧拉角计算 :使用IMU算法将原始数据转换为Yaw/Pitch/Roll欧拉角(单位:度)
3.姿态判断阈值 :
-
躺平:俯仰角和横滚角绝对值<30度
-
倒立:俯仰角与88度差值<20度
-
站立:俯仰角与-88度差值<20度
-
左倒:横滚角与-80度差值<50度
-
右倒:横滚角与80度差值<50度
4.双芯通信协议 :9字节固定帧格式,支持姿态查询指令(0x17),数据域4=姿态编码
5.拟人化反馈生成 :根据姿态生成趣味语音,如:
-
站立→"我现在正站着呢,精神抖擞~随时听你吩咐"
-
左倒→"我现在向左倒啦,有点晕乎乎的,扶我一下?"
-
倒立→"我在倒立哦,脑袋充血啦,快让我正过来~"
05 涉及学习技术点
-
6轴传感器数据采集
-
欧拉角计算
-
姿态识别算法
-
数据映射与转换
-
双芯架构任务分工
-
串口通信协议设计
-
语音交互与拟人化反馈
06 项目实现原理
- 硬件原理
首先打开【华清远见_F103&ESP32-S3 AI开发板资料V1.0\05_硬件图纸\ 1.F103&ESP32-S3 AI开发板原理图V4.3】,根据原理图查看六轴传感器电路。


上图可以看出连接传感器的I2C引脚为PB7和PB6,引脚定义如下表:

- 双芯通信原理(ESP32 为主机,STM32 为从机)
采用9 字节固定帧格式,帧结构与解析逻辑如下:

- STM32 端姿态识别与编码
传感器数据解析:通过I2C读取 QMI8658A 的横滚角和俯仰角对当前设备姿态进行判断。
姿态判断阈值:
定义不同姿态的角度阈值(躺平30 度倒立 20 度、站立 20 度、侧倒 50 度),依据 俯仰角 和 横滚角度值判断物体当前姿态:
当俯仰角和横滚角的绝对值均小于躺平阈值时,判定为躺平状态;
当俯仰角与88 度的差值小于倒立阈值时,判定为倒立状态;
当俯仰角与- 88 度的差值小于站立阈值时,判定为站立状态;
当横滚角与- 80 度的差值小于侧倒阈值时,判定为左侧倒状态;
当横滚角与80 度的差值小于侧倒阈值时,判定为右侧倒状态。
- ESP32 端姿态映射与反馈
编码到状态映射:建立字典{1:"躺着",2:"站立",3:"倒立",4:"左倒",5:"右倒"},将 STM32 返回的编码转换为文字描述;
拟人化反馈生成:根据状态随机生成趣味文案,
示例:
站立→“我现在正站着呢,精神抖擞~随时听你吩咐” 或 “目前是站立状态,腰杆挺得笔直哦”;
左倒→“我现在向左倒啦,有点晕乎乎的,扶我一下?” 或 “正往左倾斜呢,感觉要摔倒啦~”;
倒立→“我在倒立哦,脑袋充血啦,快让我正过来~” 或 “现在是倒立状态,世界都是倒着的哈哈”。
07 项目实现步骤
完整的实验步骤目录如下图。

后台私信备注:AI智能桌面伙伴,免费领取项目完整文档、源码。
08 硬件平台详细介绍
《AI智能桌面伙伴》项目硬件平台是华清远见STM32F103&ESP32-S3 AIoT开发板。
开发板简介
F103&ESP32-S3 AI 开发板是华清远见针对嵌入式与 AI 开发市场需求,打造的高性能、低成本AIoT实战平台。该开发板采用双核心设计,整合了STM32F103与ESP32-S3两款芯片:以ESP32-S3作为AI中枢,承担视觉识别、语音交互及 WiFi/BLE 无线通信任务;以STM32F103作为控制核心,实现实时运动控制与多传感器数据融合,二者通过 UART 总线无缝协同,形成 “AI 决策 + 实时执行” 的高效工作模式。
相较于仅使用STM32F103的方案,这一架构提升了系统整体性能,同时扩展了板载资源与外设接口,为更多AI及物联网应用的拓展提供了便利。为了方便实战练手,我们为该平台配套了多种硬件模块及20个实战项目,涵盖13个AI基础应用项目、2个小智AI项目、3个LVGL物联网应用,以及AI桌宠机器狗和AI智能车各1个。所有项目均基于STM32F103与ESP32-S3协同开发,“学完就能用”,助你快速打造硬核作品,轻松开发智能AIoT应用。相关资料持续更新中,后台私信领取。

STM32 与 ESP32 是单片机入门经典 MCU,技术普及度、生态完整性和商业应用优势显著。STM32 擅长精准控制,是工业与教育首选;ESP32 及升级版 S3 主打物联网,集成联网与 AI 能力,广泛应用于 AIoT 终端。二者高度互补,所以我们提倡“双核学习路径”,从入门到综合项目实战 ,建议先通过 STM32 夯实通用 MCU 开发基础,再用 ESP32 拓展物联网等开发能力,掌握后可提升技术广度与就业竞争力,实现 1+1>2,这也是双核心开发板的教学设计初衷。

对于STM32/ESP32开发感兴趣的朋友,欢迎关注~!本开发板也非常适用于高校嵌入式与AI教学、学生毕业设计、竞赛项目、个人学习及项目开发。
后台私信备注“AIoT开发板”,免费领取开发板教程/源码

 浙公网安备 33010602011771号
浙公网安备 33010602011771号