
【项目实战】基于STM32F103的智能小车(远程控制、超声波避障、循迹、红外遥控)有教程代码
在嵌入式开发学习中,实战项目是将理论转化为能力的最佳载体——本次【项目实战】聚焦基于STM32的智能小车,不仅整合了红外遥控、微信小程序远程物联控制、自适应巡线、动态避障系统、交互式显示屏五大实用功能,还为大家准备了从硬件到软件的完整学习路线,适合新手入门或开发者提升实战能力。

项目硬件清单

小车组装视频(截图)

项目功能演示

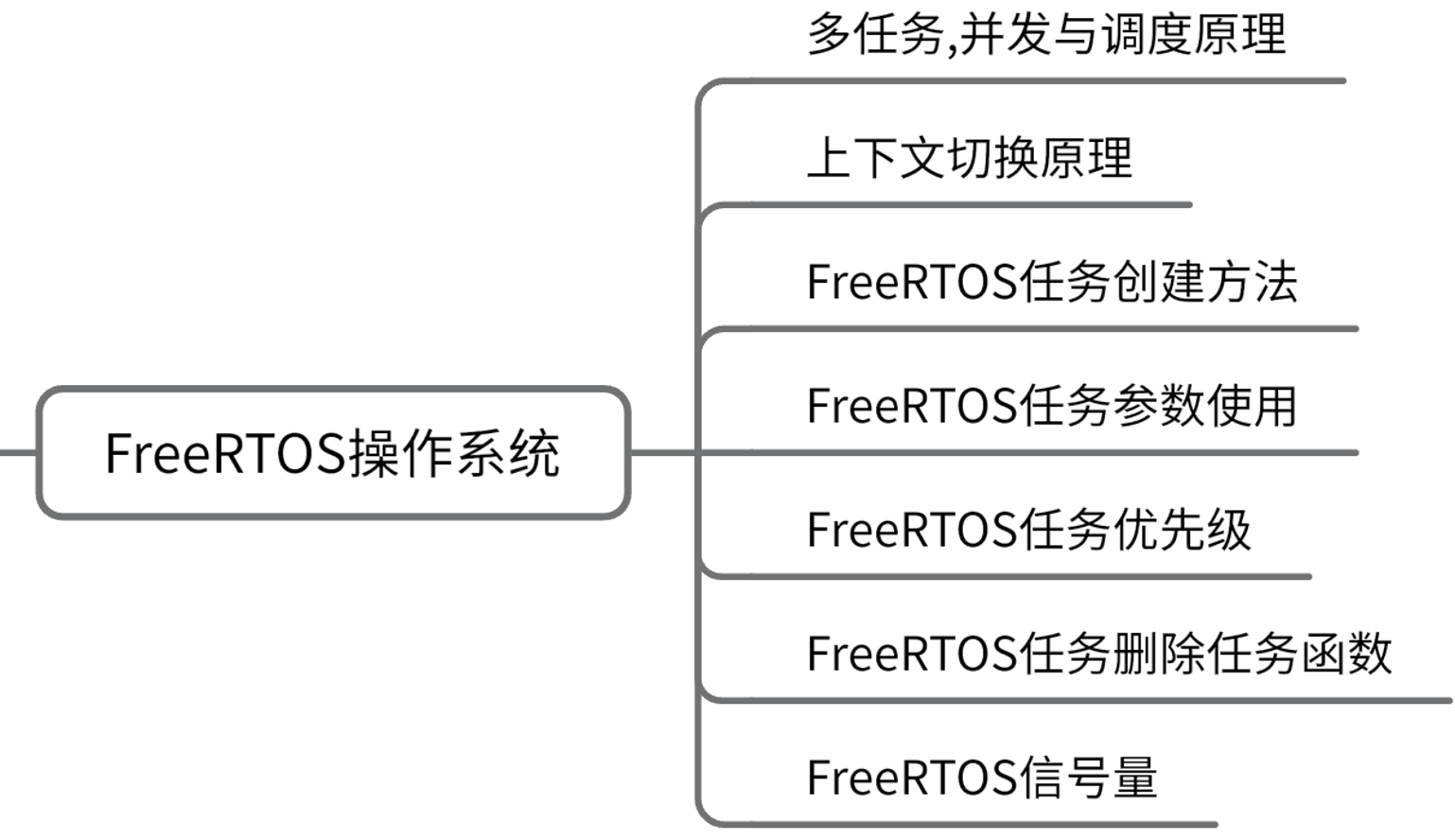
五大核心功能,多模式灵活操控:
-
红外遥控:通过传统遥控器实现基础移动控制,抗干扰性强,响应灵敏,操作简单。
-
微信小程序远程物联控制:依托物联网平台实现跨网络控制,微信小程序远程实时操控小车,支持指令传输与状态反馈,突破空间限制。
-
自适应巡线:搭载红外传感器阵列,结合PID调速算法精准调节电机转速,实现复杂路径下的稳定循迹,误差补偿快速,抗干扰能力强。
-
动态避障系统:通过超声波传感器与MPU6050六轴姿态传感器协同工作,实时检测障碍物并计算车身偏转角度,动态调整行进路线,确保避障过程平滑稳定。
-
交互式显示屏:集成 LCD 屏幕,实时显示运行模式、传感器数据、小车状态等信息,支持按键切换功能,交互直观便捷。
用户还可以通过外接其他模块,拓展更多小车功能,比如蓝牙控制、视觉跟随、视觉避障、语音控制、红外避障等。
配套课程资料
作为一款面向学习与开发的小车平台,STM32F103智能小车配备了体系化的软硬件学习课程。课程内容覆盖广泛,包含三大阶段、六大课程,400+讲视频教程,"C语言/电子电路-STM32裸机-RTOS开发-原理图PCB”全覆盖。且实验环节精心设计了“基础实验-进阶实验-综合项目”三个层次,循序渐进,帮助用户从零基础逐步成长为能够独立完成智能车项目的单片机软硬件开发工程师。后台私我领取~
《零基础小白到单片机软硬件工程师开发实战》课程网址(课程持续更新中):
https://www.yyzlab.com.cn/package/info/1902229064588505089?code=66

项目整体框架




项目详细讲解
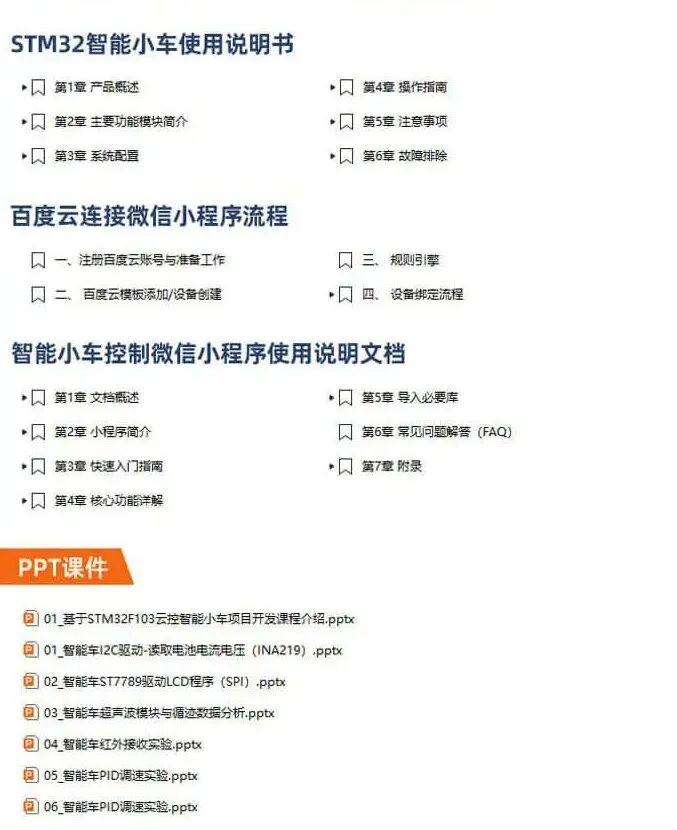
项目讲解比较长,这里就不一一去写了,可以参考配套课件及项目文档,里面详细讲解了项目实现全过程,完整版有需要的可以后台私我免费领取。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号