
增量编码器驱动程序
增量编码器驱动程序
编码器驱动
-
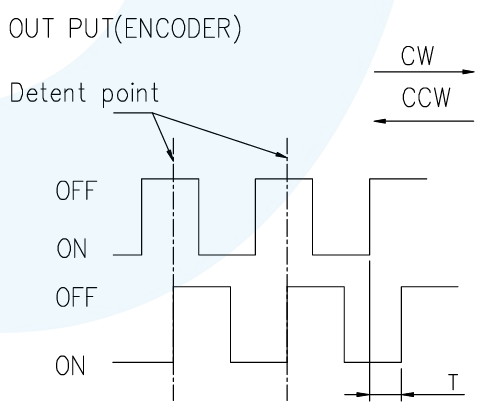
我们可以将当A、B电平有变化时记录下来
-
这样可以利用记录下来的数据,来判断左旋还是右旋
/**
* @file Encoder.c
* @brief 增量编码器驱动程序
* @author HadyLiu email:HadyLiu@outlook.com
* @version 0.0.1
* @date 2026-01-21
*
* @copyright Apache 2.0
*/
#include "Encoder.h"
EncoderHandTypedef GetEncoderStatus(EncoderUnion *p_encoder, unsigned char ec_A_Now, unsigned char ec_B_Now)
{
EncoderHandTypedef EncoderHand = NoHand;
if (ec_A_Now != p_encoder->lastA || ec_B_Now != p_encoder->lastB)
{
p_encoder->code <<= 2;
p_encoder->lastA = ec_A_Now; // 更新编码器上一个状态暂存变量
p_encoder->lastB = ec_B_Now; // 更新编码器上一个状态暂存变量
if (p_encoder->code == 0b00111000 || p_encoder->code == 0b00000111)
{
EncoderHand = LeftHand;
}
if (p_encoder->code == 0b00110100 || p_encoder->code == 0b00001011)
{
EncoderHand = RightHand;
}
}
return EncoderHand;
}
#ifndef __ENCODER_H__
#define __ENCODER_H__
#include "SYSCFG.H"
typedef union
{
/* data */
struct
{
unsigned char lastB : 1; // 低位
unsigned char lastA : 1;
unsigned char : 6; // 高位
};
struct
{
unsigned char code : 6; // 低位
unsigned char : 2;
};
} EncoderUnion;
typedef enum
{
NoHand,
LeftHand,
RightHand
} EncoderHandTypedef;
extern EncoderHandTypedef GetEncoderStatus(EncoderUnion *p_encoder, unsigned char ec_A_Now, unsigned char ec_B_Now);
#endif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号