


Datawhale组队学习😀深入浅出PyTorch Task1
Datawhale组队学习
深入浅出PyTorch-PyTorch基础知识
作者:博客园-岁月月宝贝
基于我自己对Jupyter notebook的了解&PyTorch及相关环境的熟悉,牛学长与他优秀的小伙伴们编写的原教程https://datawhalechina.github.io/thorough-pytorch/(🌟教程编写时间在3年前,所以虽然时效性有限,但是人类编写程度为100%👍) 的第零章与第一章我就不作赘述,大家需要时自取(当然,问国内大模型也很方便😊).还建议大家阅读教程文字版前先听同为Datawhale出品的B站【深入浅出Pytorch】的这个视频: https://www.bilibili.com/video/BV1L44y1472Z/?p=2&share_source=copy_web&vd_source=0c3f112a84e3e961fa46fa4e526e43be ,我最想学的张量等基础知识部分讲得最详细❤
一、张量😊
在深度学习中,各式各样数据的承载方式是"张量",那么张量是什么?请看下图:

我们从左边向右介绍,Scalar是标量,代表数字;Vector是向量,维度为1;Matrix是矩阵,维度为2;Tensor是张量,图上为三维,实际维度不限(所以它这类可以包含前面三种~). 生活中,时间序列常为三维,图像常为4维度,视频可能需要5维,它们都可以用"张量"来表示!
其实,在 PyTorch 中,torch.Tensor 是一种用于存储和变换数据的数据结构类型。如果你之前使用过 NumPy,你会发现在结构和操作方面,Tensor 和 NumPy 的多维数组(如 numpy.ndarray)非常相似。它们都支持多维数据的索引、切片、基本运算等操作(参见官方文档)。但Tensor 比 NumPy 的多维数组更强大之处在于, 通过简单的 .cuda() 方法,Tensor就能让运算在 GPU 上进行,从而大大加快训练和推理的速度。而 NumPy 的多维数组只基于 CPU 运算。另外,PyTorch 的 Tensor 通过 .requires_grad 属性可以记录所有的计算操作,并在需要时自动计算出梯度, 而NumPy 的多维数组通常需要用户手动实现. 这些使得 Tensor 非常适合用于深度学习的开发😀.
传说,张量是PyTorch运算的基本单元,且支持基础数据定义和运算,那么下面我们就来小试牛刀!
⚒下面用到的代码来自[thorough-pytorch/notebook/第二章 PyTorch基础知识/代码演示:PyTorch基础知识.ipynb at main · datawhalechina/thorough-pytorch](https://github.com/datawhalechina/thorough-pytorch/blob/main/notebook/第二章 PyTorch基础知识/代码演示:PyTorch基础知识.ipynb)
import torch
torch.tensor
如果你用的也是Pycharm,把鼠标放到torch.tensor上就可以看到:
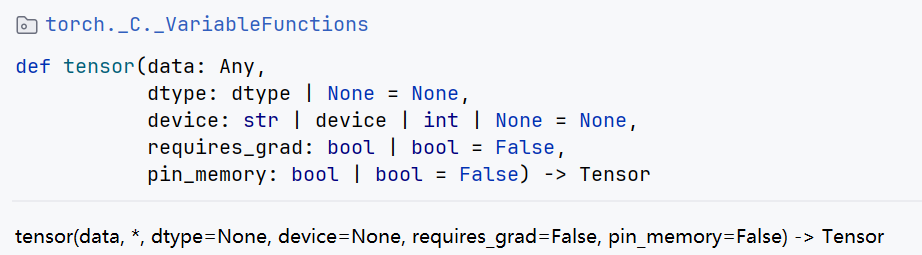
dtype:用于强制类型转化;device:限制GPU/CPU;requires_grad:是否允许求导;pin_memory:是否把他放到内存中,如果true就是放入内存和显存,用空间换时间.
import torch
# torch.tensor
# 创建tensor,用dtype指定类型。注意类型要匹配
a = torch.tensor(1.0, dtype=torch.float)
b = torch.tensor(1, dtype=torch.long)
c = torch.tensor(1.0, dtype=torch.int8)
print(a, b, c)
输出如下(强制类型转换):

PS:如果只变类型,还可以这样重置: x = torch.randn_like(x, dtype=torch.float)
下面是创建指定类型的tensor:
# 使用指定类型函数随机初始化指定大小的tensor
d = torch.FloatTensor(2,3)
e = torch.IntTensor(2)
f = torch.IntTensor([1,2,3,4]) #对于python已经定义好的数据结构可以直接转换
print(d, '\n', e, '\n', f)
输出如下(需要指定长宽/浮点数等):
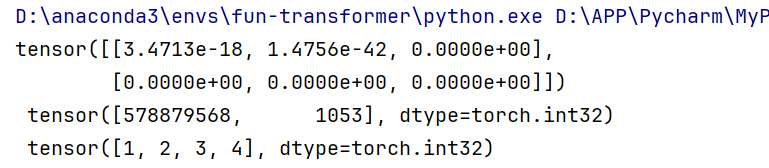
接着,我们试试它与numpy的相互转化!
# tensor和numpy array之间的相互转换
import numpy as np
g = np.array([[1,2,3],[4,5,6]])
h = torch.tensor(g)
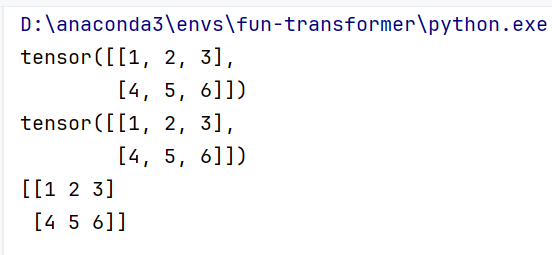
print(h)
i = torch.from_numpy(g)
print(i)
j = h.numpy()
print(j)
成功转化:
下面是一条关于"独立变量"的注意事项:
torch.tensor创建得到的张量和原数据是不共享内存的,张量对应的变量是独立变量。
而torch.from_numpy() 和torch.as_tensor() 从numpy array 创建得到的张量和原数据是共享内存的,张量对应的变量不是独立变量,修改numpy array 会导致对应tensor 的改变。
OK 下面我们来看构造Tensor的常见函数🎉
# 常见的构造Tensor的函数
k = torch.rand(2, 3)
l = torch.ones(2, 3)
m = torch.zeros(2, 3)
n = torch.arange(0, 10, 2)
print(k, '\n', l, '\n', m, '\n', n)
结果如下,大家自己找规律:
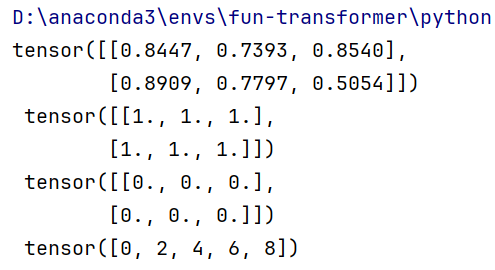
PS:还可以基于原来矩阵的torch.dtype和torch.device,创建一个新的全1矩阵,如k = k.new_ones(4, 3, dtype=torch.double) ,不过还可以k = torch.ones(4, 3, dtype=torch.double)
构造好了Tensor,那请问我们怎么查看维度呢?
k = torch.rand(2, 3)
# 查看tensor的维度信息(两种方式)
print(k.shape)
print(k.size())
输出:
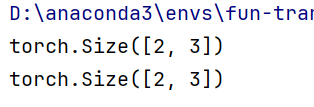
可见的确2行3列!
下面,我们来用张量作加法:
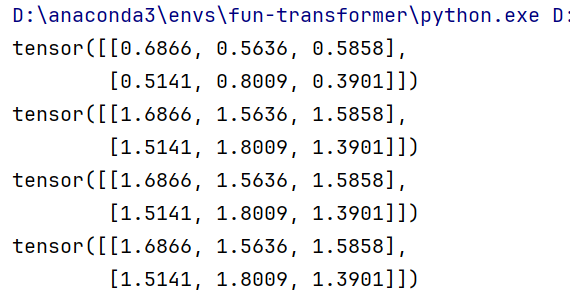
k = torch.rand(2, 3)
print(k)
o = torch.ones(2, 3)
# 方式1
print(k + o)
# 方式2
print(torch.add(k,o))
# 方式3 in-place,原值修改
o.add_(k)
print(o)
输出如下:
那么,tensor的索引方式是?
与numpy类似,索引出来的结果与原数据共享内存,修改一个,另一个会跟着修改。
你可以试试:
import torch x = torch.rand(4,3) # 取第二列 print(x[:, 1]) y = x[0,:]#获取了第一行的数据 y += 1 print(y) print(x[0, :]) # 源tensor也被改了了结果发现
x[0, :]也变成了加 1 之后的结果(*^_^*)但是如果
import torch x = torch.rand(4, 3) print("Original x:", x) # 取第一行并创建一个副本 y = x[0, :].copy() y += 1 print("Modified y:", y) print("Original x after modification:", x[0, :])你会发现
y被修改了,但x[0, :]保持不变. 这说明使用copy()方法创建了一个新的 Tensor,不再和原 Tensor 共享内存。
接着,我想了解张量形状改变的容易程度,于是
k = torch.rand(2, 3)
o = torch.ones(2, 3)
o.add_(k)
print(o)
# 改变tensor形状的神器:view
print(o.view((3,2)))
print(o.view(-1,2))# -1是指这一维的维数由其他维度决定
输出如下:
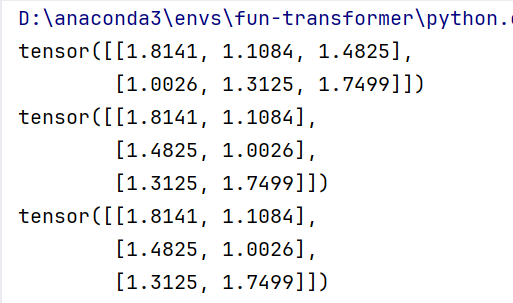
可以发现,torch.view()会改变原始张量,但是很多情况下,我们希望原始张量和变换后的张量互相不影响。推荐的方法是我们先用 clone() 创造一个张量副本(会被记录在计算图中,即梯度回传到副本时也会传到源 Tensor 👍), 然后再使用 torch.view()进行函数维度变换 。
前面讲到了创造张量,现在就讲取值!是否有办法不打草惊蛇的取到value?
import torch
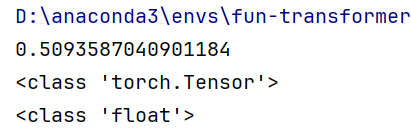
x = torch.randn(1)
print(x.item())
print(type(x))
print(type(x.item()))
可以使用 .item() 来获得这个 value:
最后,我们来讲张量的两个易错点:
1.广播机制
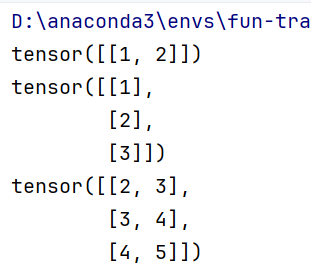
当对两个形状不同的 Tensor 按元素运算时,可能会触发广播(broadcasting)机制:先适当复制元素使这两个 Tensor 形状相同后再按元素运算。
# tensor的广播机制(使用时要注意这个特性)
p = torch.arange(1, 3).view(1, 2)
print(p)
q = torch.arange(1, 4).view(3, 1)
print(q)
print(p + q)
输出如下:
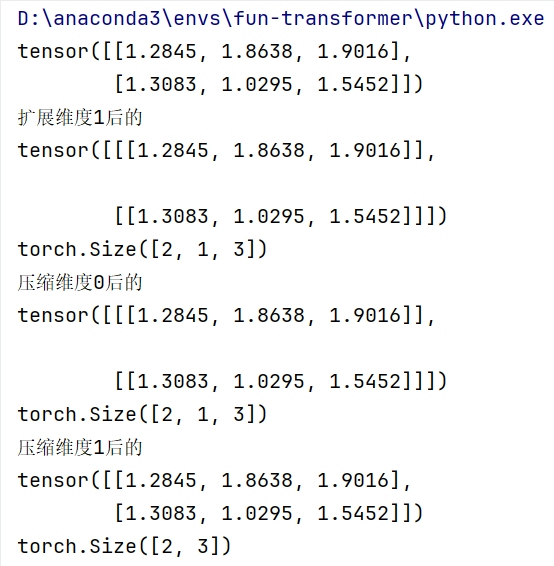
2.扩展&压缩
PS:下面的o没有经过view操作
# 扩展&压缩tensor的维度:squeeze
print(o)
r = o.unsqueeze(1)#独立变量
print("扩展维度1后的")
print(r)
print(r.shape)
s = r.squeeze(0)
print("压缩维度0后的")
print(s)
print(s.shape)
t = r.squeeze(1)
print("压缩维度1后的")
print(t)
print(t.shape)
下图可以看到只有哪个维度被拓展(维度==1),哪个维度才能被压缩:
二、自动求导😊
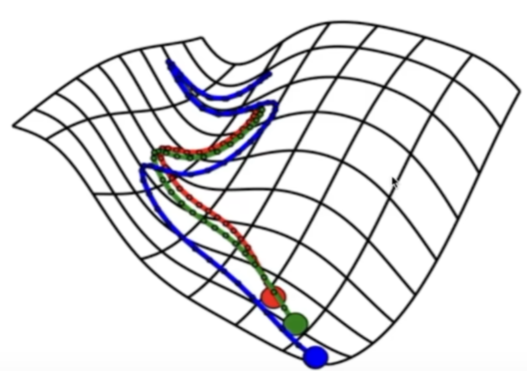
为什么要自动求导呢?因为要沿着梯度下降的方向才能找到目标函数的最优解!
细致到代码实现,autograd 是 PyTorch 中实现自动求导的核心包。它允许用户对张量(torch.Tensor)上的操作进行自动求导,从而计算梯度。这是深度学习中反向传播的基础。Tensor数据结构是实现自动求导的基础。
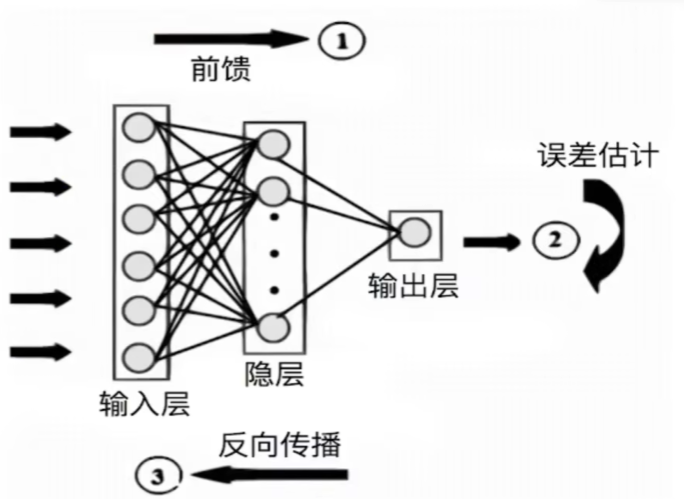
全流程:①输入数据,正向传播;②同时创建计算图;③计算损失函数;④损失函数反向传播;⑤更新模型参数。
autograd 的工作原理
autograd 是一个 运行时定义(define-by-run) 的框架。这意味着:
- 动态计算图:每次运行代码时,
autograd会根据代码的执行动态构建计算图。 - 反向传播:计算图用于反向传播,自动计算梯度。
- 灵活性:每次迭代可以有不同的计算图,非常适合动态模型(如循环神经网络)。
自动求导——数学基础
-
多元函数求导的雅克比矩阵
\[J = \begin{pmatrix} \frac{\partial y_1}{\partial x_1} & \cdots & \frac{\partial y_1}{\partial x_n} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_m}{\partial x_1} & \cdots & \frac{\partial y_m}{\partial x_n} \end{pmatrix} \] -
复合函数求导的链式法则
若 $ h(x) = f(g(x)) $,则 $ h'(x) = f'(g(x)) \cdot g'(x) $ -
PyTorch自动求导提供了计算雅克比乘积的工具
损失函数 $ l $ 对输出 $ y $ 的导数是:\[v = \begin{pmatrix} \frac{\partial l}{\partial y_1} & \cdots & \frac{\partial l}{\partial y_m} \end{pmatrix} \]那么 $ l $ 对输入 $ x $ 的导数就是:
\[vJ = \begin{pmatrix} \frac{\partial l}{\partial y_1} & \cdots & \frac{\partial l}{\partial y_m} \end{pmatrix} \begin{pmatrix} \frac{\partial y_1}{\partial x_1} & \cdots & \frac{\partial y_1}{\partial x_n} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_m}{\partial x_1} & \cdots & \frac{\partial y_m}{\partial x_n} \end{pmatrix} = \begin{pmatrix} \frac{\partial l}{\partial x_1} & \cdots & \frac{\partial l}{\partial x_n} \end{pmatrix} \]
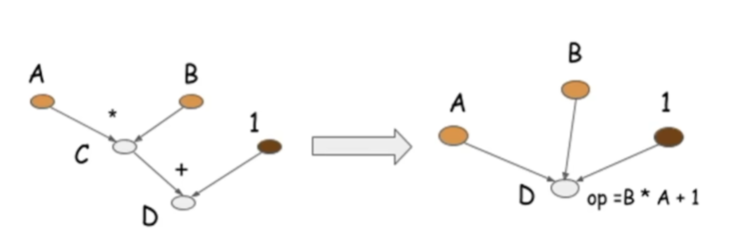
自动求导——动态计算图(DCG)
DCG = 张量 + 运算
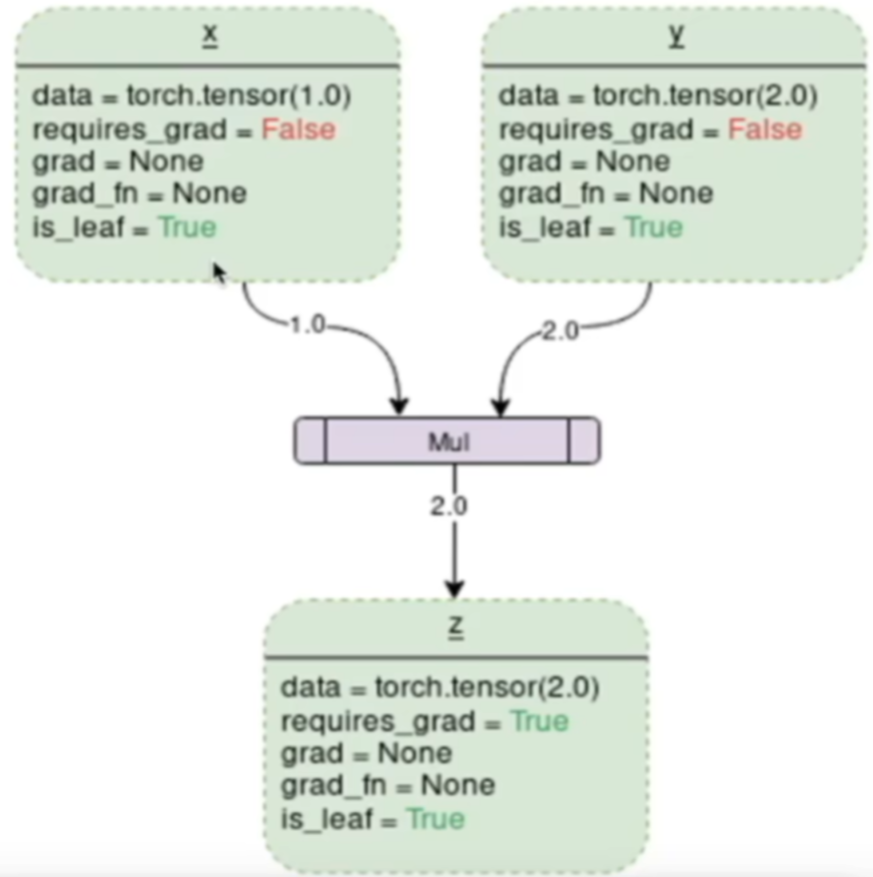
如果设置它的属性
.requires_grad为True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用.backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性。要阻止一个张量被跟踪历史,可以调用
.detach()方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。为了防止跟踪历史记录(和使用内存),可以将代码块包装在with torch.no_grad():中。
既然有动态图,就有静态图,它们最大的区别在于静态图不需要预先定义计算图的结构,而动态图需要:
实践部分
下面,我们通过一个简单的函数 $$y=x_1+2∗x_2$$ 来说明PyTorch自动求导的过程
import torch
x1 = torch.tensor(1.0, requires_grad=True)
x2 = torch.tensor(2.0, requires_grad=True)
y = x1 + 2*x2
print(y)
输出为5,说明正向传播成功:

接下来我们查看导数是否要计算&其是否存在
# 首先查看每个变量是否需要求导
print(x1.requires_grad)
print(x2.requires_grad)
print(y.requires_grad)
# 查看每个变量导数大小。此时因为还没有反向传播,因此导数都不存在
print(x1.grad.data)
print(x2.grad.data)
print(y.grad.data)
有趣的事情发生了:
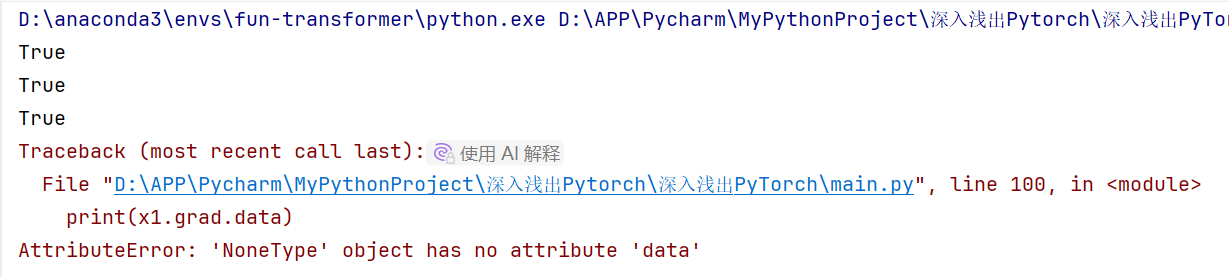
变量都需要求导,但是导数不存在,因为没有反向传播!
PS:x1可测得张量值存在
那么我们试试反向传播:
# 反向传播后看导数大小
y = x1 + 2*x2
y.backward()
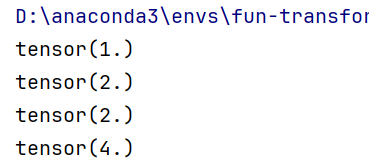
print(x1.grad.data)
print(x2.grad.data)
经过反向传播,梯度被记录到“计算图”里了,自然可以取出来😀
其他特征——导数的累积:
# 导数是会累积的,重复运行相同命令,grad会增加
y = x1 + 2*x2
y.backward()
print(x1.grad.data)
print(x2.grad.data)
输出:
💡所以每次计算前需要清除当前导数值避免累积,这一功能可以通过pytorch的optimizer实现。
大胆尝试:阻断x1,x2求导权利:
# 尝试,如果不允许求导,会出现什么情况?
x1 = torch.tensor(1.0, requires_grad=False)
x2 = torch.tensor(2.0, requires_grad=False)
y = x1 + 2*x2
y.backward()
输出:
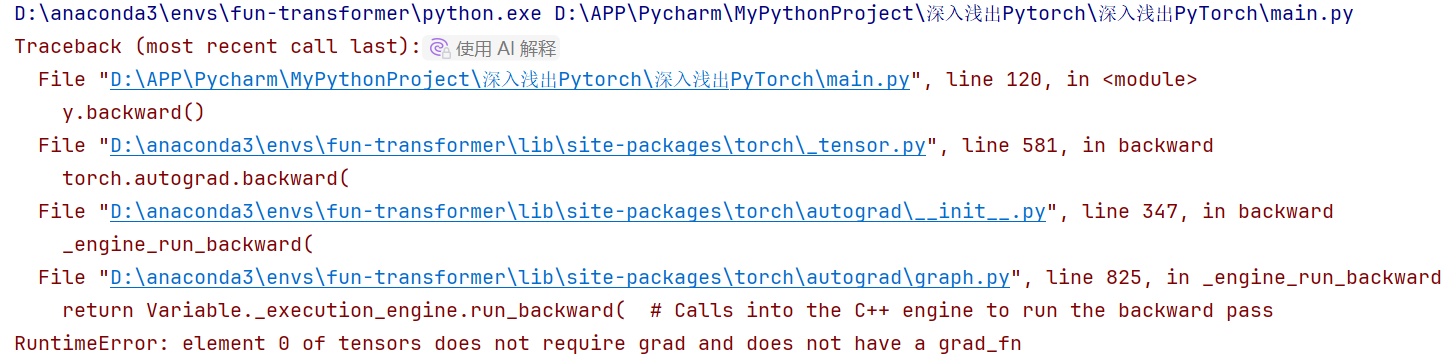
可见反向传播无法完成😘
细节补充
requires_grad=True用于追踪张量的计算历史。.backward()方法用于计算导数,标量不需要参数,非标量需要指定gradient参数。.requires_grad_()方法可以原地改变张量的requires_grad标志。
# 创建一个张量并设置 requires_grad=True 用来追踪其计算历史
x = torch.ones(2, 2, requires_grad=True) # tensor([[1., 1.], [1., 1.]], requires_grad=True)
print(x)
# 对这个张量做一次运算
y = x ** 2 # tensor([[1., 1.], [1., 1.]], grad_fn=<PowBackward0>)
print(y)
# y 是计算的结果,所以它有 grad_fn 属性
print(y.grad_fn) # <PowBackward0 object at 0x000001CB45988C70>
# 对 y 进行更多操作
z = y * y * 3 # tensor([[3., 3.], [3., 3.]], grad_fn=<MulBackward0>)
out = z.mean() # tensor(3., grad_fn=<MeanBackward0>)
print(z, out)
# .requires_grad_(...) 原地改变了现有张量的 requires_grad 标志
a = torch.randn(2, 2) # 默认 requires_grad = False
a = ((a * 3) / (a - 1)) # 默认情况下 requires_grad 仍为 False
print(a.requires_grad) # False
# 原地设置 requires_grad 为 True
a.requires_grad_(True) # 现在 a 的 requires_grad 为 True
print(a.requires_grad) # True
# 对 a 进行操作并查看 grad_fn
b = (a * a).sum() # tensor(..., grad_fn=<SumBackward0>)
print(b.grad_fn) # <SumBackward0 object at 0x000001CB4A19FB50>
- 雅可比向量积的计算:
- 在深度学习中,经常需要计算雅可比矩阵的乘积,而不是完整的雅可比矩阵。这是因为完整的雅可比矩阵可能非常大,计算和存储成本很高。
backward(v)方法允许用户传递一个向量v,计算雅可比矩阵与该向量的乘积,从而避免了计算完整的雅可比矩阵。
- 阻止
autograd跟踪计算历史:- 在某些情况下,例如模型评估或推理阶段,不需要计算梯度,可以使用
with torch.no_grad():代码块来禁用梯度计算。 - 这样可以节省内存和计算资源,提高代码的运行效率。
- 在某些情况下,例如模型评估或推理阶段,不需要计算梯度,可以使用
- 修改张量值而不影响计算图:
- 有时需要直接修改张量的值,但不希望这些修改影响反向传播。可以通过操作
tensor.data来实现。 tensor.data是一个独立于计算图的张量,修改它不会影响计算图的结构和梯度传播。
- 有时需要直接修改张量的值,但不希望这些修改影响反向传播。可以通过操作
# 创建一个张量并设置 requires_grad=True 用来追踪其计算历史
x = torch.randn(3, requires_grad=True) # tensor([-0.9332, 1.9616, 0.1739], requires_grad=True)
print(x)
# 对这个张量做一次运算
y = x * 2 # tensor([-1.8664, 3.9232, 0.3478], grad_fn=<MulBackward0>)
i = 0
while y.data.norm() < 1000: # 当 y 的范数小于 1000 时,继续循环
y = y * 2 # 每次将 y 乘以 2
i = i + 1 # 计数器加 1
print(y) # tensor([-477.7843, 1004.3264, 89.0424], grad_fn=<MulBackward0>)
print(i) # 8
# 在这种情况下,y 不再是标量。torch.autograd 不能直接计算完整的雅可比矩阵,
# 但是如果我们只想要雅可比向量积,只需将这个向量作为参数传给 backward:
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float) # 定义一个向量 v
y.backward(v) # 计算雅可比向量积
print(x.grad) # tensor([5.1200e+01, 5.1200e+02, 5.1200e-02])
# 也可以通过将代码块包装在 with torch.no_grad(): 中,
# 来阻止 autograd 跟踪设置了.requires_grad=True的张量的历史记录。
print(x.requires_grad) # True
print((x ** 2).requires_grad) # True
with torch.no_grad(): # 在这个上下文中,autograd 不会跟踪张量的历史记录
print((x ** 2).requires_grad) # False
# 如果我们想要修改 tensor 的数值,但是又不希望被 autograd 记录(即不会影响反向传播),
# 那么我们可以对 tensor.data 进行操作。
x = torch.ones(1, requires_grad=True) # 创建一个张量 x,设置 requires_grad=True
print(x.data) # tensor([1.]) # 还是一个 tensor
print(x.data.requires_grad) # False # 但是已经是独立于计算图之外
y = 2 * x # y = 2 * x
x.data *= 100 # 只改变了值,不会记录在计算图,所以不会影响梯度传播
y.backward() # 计算梯度
print(x) # tensor([100.], requires_grad=True) # 更改 data 的值也会影响 tensor 的值
print(x.grad) # tensor([2.])
三、并行计算简介 😊
1 为什么要做并行计算
- 深度学习依赖算力:GPU 的出现让模型训练更快、更好。🚀
- PyTorch 并行计算:通过多个 GPU 参与训练,减少训练时间。⏳
- 查看 GPU 信息:使用
nvidia-smi命令查看 GPU 使用情况。💻
2 为什么需要 CUDA
- CUDA 是 NVIDIA 的 GPU 并行计算框架:用于 GPU 编程。💻
- PyTorch 中的 CUDA:表示将模型或数据迁移到 GPU 上进行计算。🔄
- 使用
.cuda()方法:将模型或数据从 CPU 迁移到 GPU(默认 0 号 GPU)。➡️ - 注意事项:
- 使用
.cuda()而不是.gpu()。❌ - 只有部分 NVIDIA GPU 支持 CUDA,AMD GPU 使用 OpenCL(PyTorch 不支持)。⚠️
- 避免频繁在 GPU 和 CPU 之间传递数据,尽量减少数据切换。🔄
- 简单操作尽量使用 CPU。⚙️
- 使用
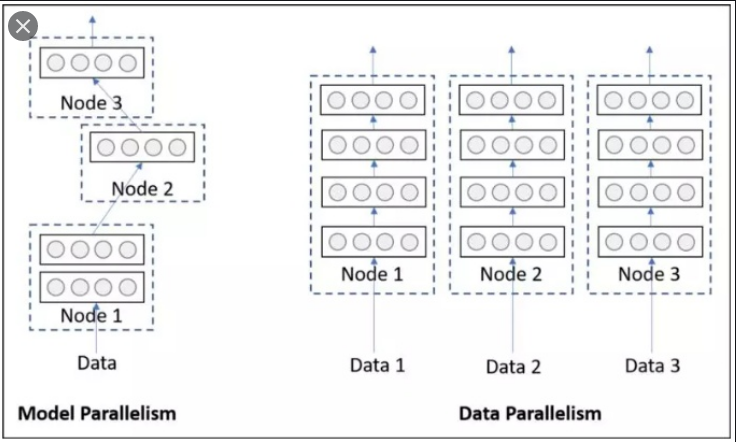
3 常见的并行方法
-
网络结构分布到不同的设备中 (Network Partitioning):
- 将模型的不同部分拆分到不同 GPU 上。🧩
- 问题:GPU 之间的通信成本高,逐渐被淘汰。⚠️
-
同一层的任务分布到不同数据中 (Layer-wise Partitioning):
- 将同一层的模型拆分到不同 GPU 上。🧩
- 问题:同步任务加重,通信成本高。⚠️
-
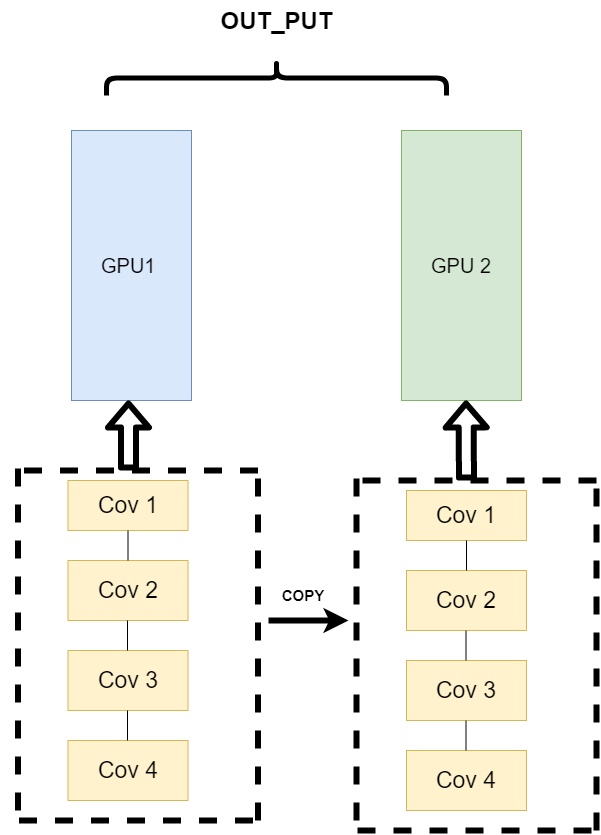
不同的数据分布到不同的设备中,执行相同的任务 (Data Parallelism):
- 将输入数据拆分到不同 GPU 上,每个 GPU 训练一部分数据。🔄
- 优势:解决通信问题,主流方式。🌟
![数据并行.png]()
4 使用 CUDA 加速训练
-
单卡训练:
-
将模型和数据迁移到 GPU 上:
model = Net() model.cuda() # 模型迁移到 GPU for image, label in dataloader: image = image.cuda() # 数据迁移到 GPU label = label.cuda() # 数据迁移到 GPU
-
-
多卡训练:
-
DataParallel (DP):
![DP.png]()
-
使用
nn.DataParallel实现单机多卡训练:model = Net() model.cuda() # 模型迁移到 GPU if torch.cuda.device_count() > 1: model = nn.DataParallel(model) # 单机多卡 DP 训练 -
指定 GPU:
model = nn.DataParallel(model, device_ids=[0, 1]) # 使用 0 和 1 号 GPU -
手动指定 GPU:
os.environ["CUDA_VISIBLE_DEVICES"] = "1,2" # 使用 1 和 2 号 GPU
-
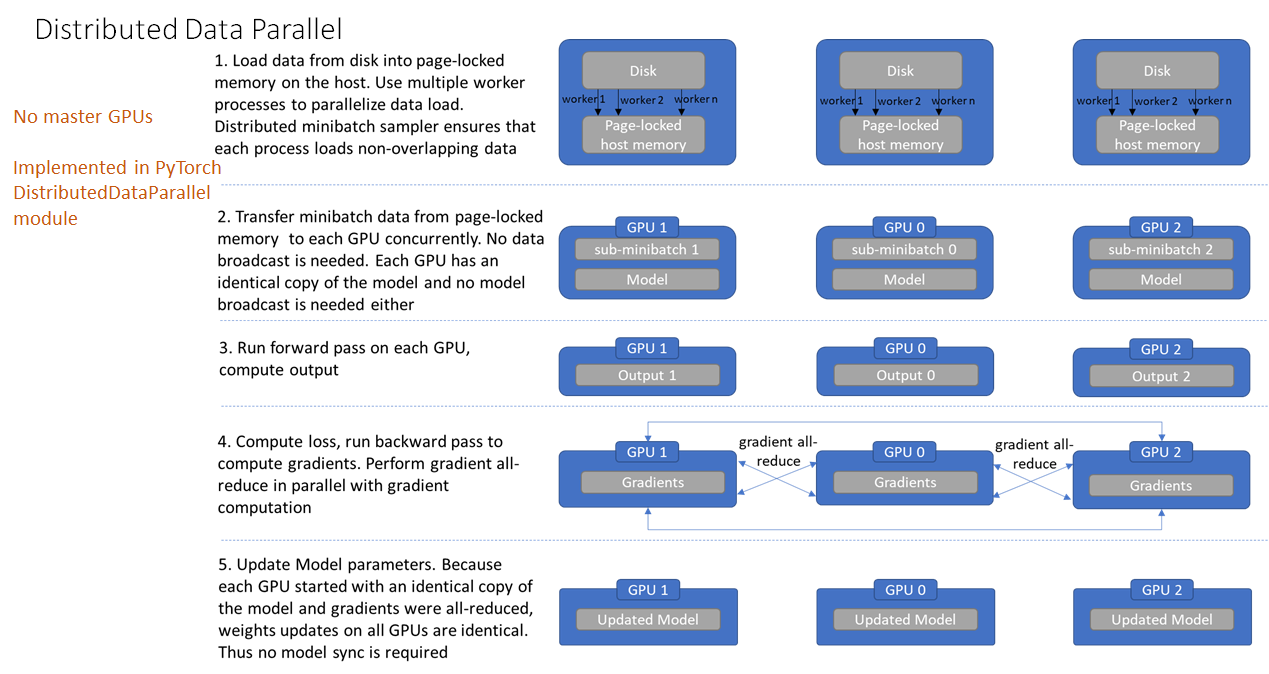
-
DistributedDataParallel (DDP):
![DP.png]()
-
优点:性能更好,负载均衡。🌟
-
缺点:使用复杂。⚠️
-
基本用法:
-
初始化进程组:
torch.distributed.init_process_group(backend='nccl') -
创建分布式模型:
model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.local_rank]) -
创建分布式数据加载器:
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset) train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=16, sampler=train_sampler) -
启动 DDP:
CUDA_VISIBLE_DEVICES=0,1,2,3 python -m torch.distributed.launch --nproc_per_node=4 main.py
-
-
-
-
DP 与 DDP 的优缺点:
- DP:
- 优点:代码简单,一行代码即可实现。👍
- 缺点:负载不均衡,第一块 GPU 显存占用更多,效率较低。⚠️
- DDP:
- 优点:负载均衡,效率高,每个进程独立训练。🌟
- 缺点:需要修改较多代码,使用复杂。⚠️
- DP:
总结
- 并行计算:通过多个 GPU 提升训练速度。🚀
- CUDA:NVIDIA 的 GPU 并行计算框架,用于将模型和数据迁移到 GPU。🔄
- 并行方法:数据并行 (Data Parallelism) 是主流方法。🌟
- CUDA 加速训练:单卡训练简单,多卡训练推荐使用 DDP。👍
四、AI硬件加速设备 😊
1. CPU 和 GPU 🖥️
| 设备 | 定义 | 特点 |
|---|---|---|
| CPU | 中央处理器,电脑的核心配件 | 处理指令、执行操作、控制时间、处理数据 |
| GPU | 图形处理单元 | 专为图形处理设计,计算速度快,浮点运算能力强 |
2. 专用集成电路 (ASIC) 🖥️
- 定义:为实现特定要求而定制的芯片。
- 优点:高性能、低功耗、高可靠性、高集成度。
- 缺点:开发周期长,功能难以扩展。
3. TPU (Tensor Processing Unit) 🖥️
- 定义:谷歌为优化 TensorFlow 框架而设计的专用芯片。
- 芯片架构设计:
- Matrix Multiply Unit (MMU):包含 256x256 个 MAC 部件,每个部件执行 8 位乘加操作。
- 脉动阵列 (Systolic Array):数据一波一波地流过芯片,类似于心脏跳动供血的方式。
- 技术特点:
- AI 加速专用:特定领域架构,单线程控制,定制指令集。
- 脉动阵列设计:在一个时钟周期内处理数十万次矩阵运算。
- 确定性功能和大规模片上内存:片上内存占芯片面积的 35%,减少片外数据访存能耗。
4.NPU (Neural-network Processing Unit) 🖥️
- 定义:采用“数据驱动并行计算”的架构,特别擅长处理视频、图像类的海量多媒体数据。
- DianNao 系列架构:
- DianNao:小尺寸、高吞吐量的加速器。
- DaDianNao:多核升级版本,支持训练任务。
- ShiDianNao:机器视觉专用加速器,使用二维运算阵列。
- PuDianNao:异构运算单元,支持多种机器学习算法。
5. 总结 🌟
- CPU 和 GPU:通用处理器,适用于多种任务。
- ASIC:专用定制芯片,高性能、低功耗,但开发周期长。
- TPU:谷歌设计的专用芯片,优化 TensorFlow 框架,适用于深度学习加速。
- NPU:寒武纪设计的专用芯片,适用于神经网络深度学习,支持多种算法。
就到这里~谢谢大家!!!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号