
搭建SLAM学习环境
搭建SLAM环境
1 ubuntu系统的安装
网上教程一大堆,随便找
注意:
查看系统BISO的类型
系统分区的挂载
1.1 AMD安装出来的一大堆毛病(没wifi、亮度无法调节等)
主要是更新内核
查看Ubuntu内核版本
uname -a
https://blog.csdn.net/weixin_40647655/article/details/109228578
2 安装VScode编译器
直接在软件中下载
安装插件
C/C++
Cmake
Cmkae Tools
Code Runner 在Setting 中设置RUN IN TERMINAL
Chinese
better comments 自定义颜色在window好设置,在Ubuntu中还没有设置好?
终端输出的字体太乱
setting -> font ->终端 _>Font Family 改为 'monospace'
3 SLAM十四讲环境配置
3.1.1 ch3,eigen安装
不要使用该命令安装,会默认安装3.2版本的eigen
sudo apt-get install libeigen3-dev //安装到/usr/include/eigen3
在vscode 编辑配置中添加 "/usr/include/**"
先删除
先找到安装的位置
sudo updatedb
locate eigen3
直接删掉这些文件或文件夹
sudo rm -rf /usr/include/eigen3 /usr/lib/cmake/eigen3 /usr/share/doc/libeigen3-dev /usr/share/pkgconfig/eigen3.pc /var/lib/dpkg/info/libeigen3-dev.list /var/lib/dpkg/info/libeigen3-dev.md5sums
在官网下载eigen3.3.7的版本,eigen官网,解压后
mkdir build
cd build
cmake ..
sudo make install
#安装后头文件安装在/usr/local/include/eigen3/
#移动头文件
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
【备注】:在很多程序中 include 时经常使用 #include <Eigen/Dense> 而不是使用 #include
<eigen3/Eigen/Dense> 所以要做下处理
3.1.2 ch3,Pangolin
按照这个装
首先安装Pangolin所需依赖
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install cmake
sudo apt install libpython2.7-dev
sudo apt install python-pip
sudo python -mpip install numpy pyopengl Pillow pybind11
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
sudo apt install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev
sudo apt install libdc1394-22-dev libraw1394-dev
sudo apt install libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev
解压pangolin的压缩包
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .
如果遇到 :error: ISO C++1z does not allow dynamic exception specifications 类似报错
使用:cmake -DBUILD_PANGOLIN_LIBOPENEXR=OFF .. #目的是禁用OpenEXR
sudo make install
测试
cd ~/Pangolin/build/examples/HelloPangolin
./HelloPangolin
https://blog.csdn.net/qq_43647590/article/details/120226747
【测试ch3的代码】
3.2 ch4,Sophus安装
编译useSophus.cpp 报错
/usr/local/include/sophus/rotation_matrix.hpp:4:10: fatal error: Eigen/Dense: 没有那个文件或目录
#include <Eigen/Dense>
这是因为 eigen 库安装在了 /usr/include/eigen3/Eigen 路径下或者/usr/local/eigen3/Eigen,需使用下面命令映射到 /usr/include 路径下
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
//或者 sudo ln -s /usr/local/include/eigen3/Eigen /usr/include/Eigen
按照这个博客装
https://blog.csdn.net/scut_xz/article/details/117326970
【测试ch4代码】
3.3 ch5,opencv安装
3.3.1 安装ROS
ros里面就包括了opencv了
用这个方法
rosdep init 和 rosdep update可以直接用下载好的文件rosdep
1.sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.sudo apt update
4.sudo apt install ros-melodic-desktop-full
5.把文件rosdep拷贝到/etc/ros下 在rosdep文件目录下输入 sudo cp -r rosdep /etc/ros
用户环境设置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装包编译依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
6.开一个终端运行roscore(若提示无法找到命令则重新运行sudo apt install ros-melodic-desktop-full)
7.开一个终端运行rosrun turtlesim turtlesim_node 会出现小乌龟
8.开一个终端运行rosrun turtlesim turtle_teleop_key,可以在该终端下通过键盘操控乌龟行走
【用ch5测试opencv】
3.3.2 安装opencv3以上的版本
由于ch8中的直接光流法会需要,opencv3
这里安装的是opencv4.1.0
安装依赖
sudo apt-get install build-essential libgtk2.0-dev libgtk-3-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt install python3-dev python3-numpy
sudo apt install libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev
sudo apt install libpng-dev libopenexr-dev libtiff-dev libwebp-dev
安装
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D OPENCV_GENERATE_PKGCONFIG=ON -D CMAKE_INSTALL_PREFIX=/usr/local/opencv4 ..
make -j4
sudo make install
最后在CMakeLists中添加opencv4配置文件的路径
报错
error: ‘CV_GRAY2BGR’ was not declared in this scope cv::cvtColor(img2, img2_show, CV_GRAY2BGR);
将则需要将CV_GRAY2BGR,更新为COLOR_GRAY2BGR
cv::cvtColor(img2, img2_show, COLOR_GRAY2BGR);
https://blog.csdn.net/weixin_44684139/article/details/105007316
安装opencv4 冒得用,直接法还是会报错,还是要opencv3
首先再安装一下依赖项
sudo apt-get install build-essential libgtk2.0-dev libvtk5-dev libjpeg-dev libtiff4-dev libjasper-dev libopenexr-dev libtbb-dev
解压opencv 3.4.1
安装opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local/opencv3 ..
make -j4
sudo make install
在CMakeLists中添加
set(OpenCV_DIR "/usr/local/opencv3/share/OpenCV")
https://www.icode9.com/content-4-906639.html
ORB SLAM2 中安装opencv3.4.5
cd opencv-3.4.5
mkdir build
cd build
cmake ..
make
sudo make install
配置环境变量
sudo vim /etc/ld.so.conf.d/opencv.conf
在打开的空白文件中添加 /usr/local/lib
执行 sudo ldconfig ,使配置的环境变量生效
配置 .bashrc ,末尾添加下面两行
//打开.bashrc
sudo vim /etc/bash.bashrc
//添加以下两行内容到.bashrc
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source 与 update
source /etc/bash.bashrc
sudo updatedb
测试是否正常安装 (成功会出现带 “hello opcv” 字样的窗口)
cd opencv-3.4.5/samples/cpp/example_cmake
cmake .
make
./opencv_example
3.4 ch6,优化库安装
3.4.1 Ceres安装
-
安装依赖
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libgtest-dev -
下载包
-
cmake工程编译
mkdir build cd build cmake .. make -
安装
sudo make install
3.4.2 G20安装
按书上安装
sudo apt-get install qt5-qmake qt5-default libqglviewer-dev-qt5 libsuitesparse-dev libcxsparse3 libcholmod3
装完后,在build文件夹目录环境下输入:
sudo ldconfig
测试前把g2o里面代码修改一下
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量(eg. abc)度为D,误差值(eg. error)维度为d
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block( linearSolver ); // 矩阵块求解器
g2o::OptimizationAlgorithmLevenberg( solver_ptr );
g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr );
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出
貌似我直接用3rdparty中的g2o就不用换这个
果然还是的用那个,不然ch10中的g2o_viewer缺失
https://www.cnblogs.com/xueyuanaichiyu/p/7921382.html
【测试ch6代码】
3.5 ch9 meshlab的安装
感觉是网络的问题,一直下载不了那个库
https://blog.csdn.net/qq_41873211/article/details/115323446?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-1.no_search_link&spm=1001.2101.3001.4242.2
还是先用老版本
sudo apt-get install meshlab
使用方法
meshlab *.ply
https://blog.csdn.net/qq_15262755/article/details/80352867
3.6 ch12 安装点云库
sudo apt-get install libpcl-dev pcl-tools
4 其他软件的安装
4.1 搜狗输入法
https://blog.csdn.net/lupengCSDN/article/details/80279177
首先,安装Fcitx输入框架
sudo apt install fcitx
下载相应的安装包,在包的路径中打开终端
sudo apt --fix-broken install
最后安装
sudo dpkg -i sogoupinyin_2.4.0.3469_amd64.deb
4.2 WPS
sudo dpkg -i wps-office_11.1.0.10702_amd64.deb
https://blog.csdn.net/qq_35451572/article/details/85856239
4.3 QQ
sudo dpkg -i linuxqq_2.0.0-b2-1089_amd64.deb
遇到错误
sudo apt-get -f install
https://im.qq.com/linuxqq/download.html
4.4 electro-ssr
终于配置ssr成功了,原来这么简单!
-
安装依赖
sudo apt install libcanberra-gtk-module libcanberra-gtk3-module gconf2 gconf-service libappindicator1 sudo apt-get install libssl-dev sudo apt-get install libsodium-dev -
安装electron-ssr
-
终端输入,启动ssr
electron-ssr -
添加节点信息,把系统的网络代理改为自动
-
关键的一步,在订阅服务器里面的快捷建设之中,将切换系统代理模式启动并设置相应快捷键,最好不要设置为ctrl+c
-
按下快捷键以后,绿色小飞机就变成浅蓝色的啦
-
然后谷歌就可以同步书签,插件了,太舒服了
4.5 软件卸载与安装
离线安装与卸载(deb文件格式安装)
安装
sudo dpkg -i *.deb
卸载
1. 先查看安装包名字
sudo dpkg -l
2.删除其包和配置文件
sudo dpkg -r 【包名字】
sudo dpkg --purge 【包名字】
在线安装(apt-get方式安装)
是在线安装deb软件包的命令,主要用于在线从互联网的软件仓库中 搜索、安装、升级、卸载 软件
重点是源好用
安装
sudo apt–get install 安装包
卸载
sudo apt-get remove 安装包名
sudo apt-get --purge remove 安装包名
https://blog.csdn.net/weixin_46072106/article/details/109825375?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-4.no_search_link&spm=1001.2101.3001.4242.3
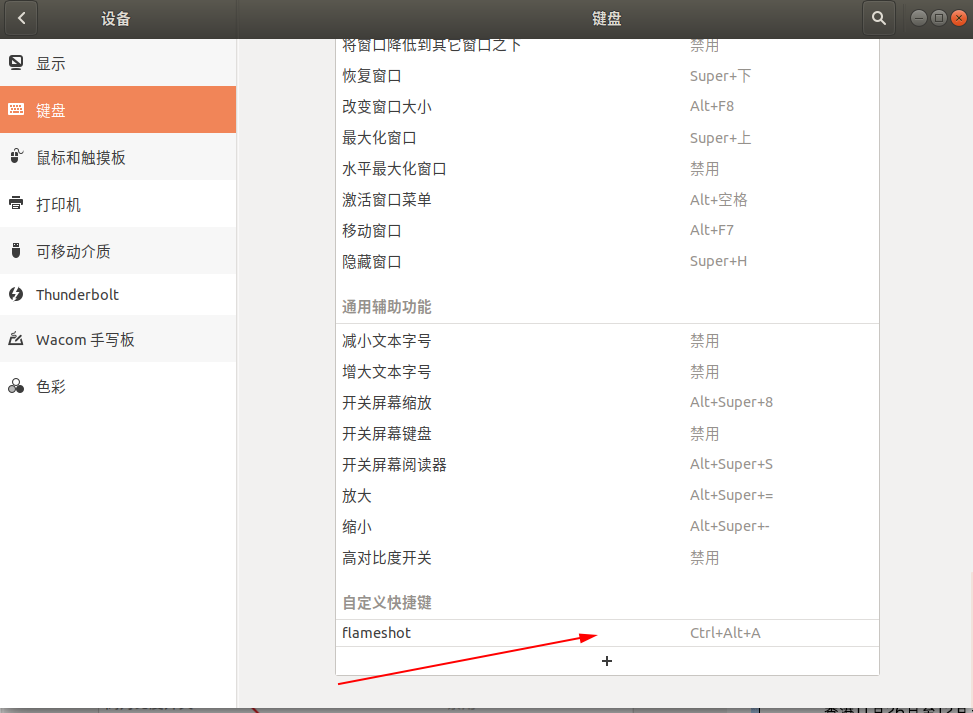
4.6 截图软件的安装
https://blog.csdn.net/u011017694/article/details/105042378
sudo apt-get install flameshot
安装成功后,用如下命令启动
flameshot gui
设置快捷键

感谢我廖哥的分享,以上资料仅供学习参考

 浙公网安备 33010602011771号
浙公网安备 33010602011771号