GRPO详解
GRPO详解
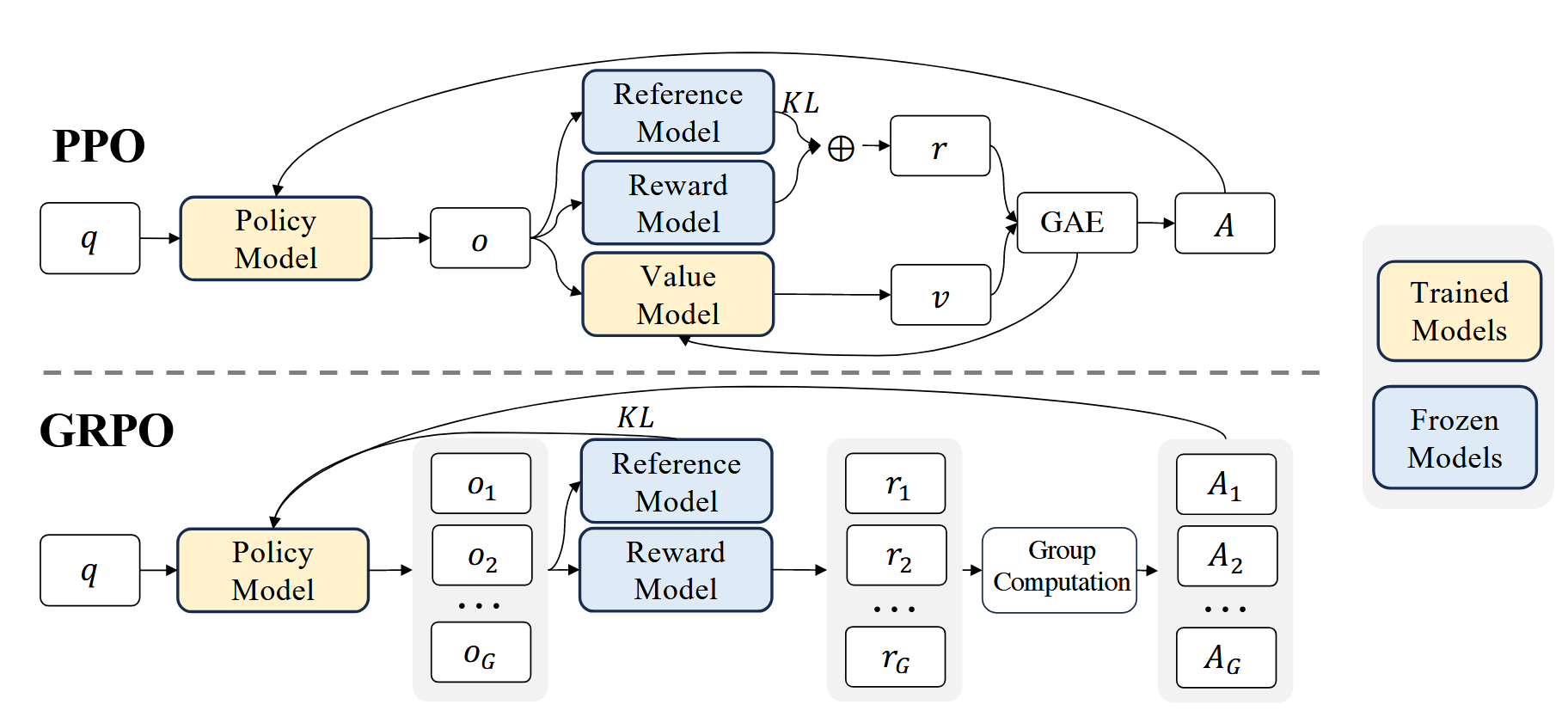
GRPO算法是在PPO算法的基础上进化而来的,在搞清楚GRPO算法前,需要先了解PPO算法是如何在LLM的Post Training中应用的。
本文主要参考DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models。
论文链接:https://arxiv.org/abs/2402.03300
PPO概述
PPO的理论基础已在 https://www.cnblogs.com/GreenOrange/articles/18582769 给出,这里只简述PPO在LLM中的应用。
其中最常用用法如下,目标是最大化\(\mathcal{J}_{PPO}(\theta)\):
其中\({\pi}_\theta\)和\(\pi_{\theta_{old}}\)分别为当前和旧策略模型,\(q\)、\(o\)分别为问题数据集和旧策略\(\pi_{\theta_{old}}\)中采样的问题和输出,\(\epsilon\)为PPO中引入的用于稳定训练的剪裁相关超参数。\({A_t}\)是优势,它是通过应用广义优势估计GAE计算的。
使用PPO来更新模型参数,\(\pi_{\theta_{old}}\)指的是未更新参数前的的模型,\({\pi}_\theta\)指的是每一步更新后的模型。\(\mathbb{E}[q \sim P(Q), o \sim \pi_{\theta_{old}}(O|q)]\)可以理解为采样过程。后面那部分是非常常规的PPO算法。而对于优势函数\(A_t\)的计算,有如下计算公式。
\(\gamma\) 是折扣因子,\(\lambda\)是\(GAE\)的超参数,\(r_t\)是时间步 \(t\)的奖励,\(V(s_t)\)是状态 \(s_t\)的价值函数估计,而这个价值模型的体量一般与要训练的策略模型也就是LLM相当。
而\(r_t\)的计算公式如下:
\(r_\phi (q, o_{\leq t})\)是专门训练的奖励模型给出的,而\(\beta \log \frac{\pi_\theta (o_t | q, o_{< t})}{\pi_{ref}(o_t | q, o_{< t})}\)则是对每一次奖励都计算一次KL散度进行约束。也就是说每个token生成都要计算一次KL散度。
综上,我们可以看出PPO算法在计算过程中有两个模型要训练,也就是之前提到的Actor网络和Critic网络,也就是LLM与V网络。然后在每个token生成的时候都需要计算KL散度比较浪费资源。GRPO针对这两个问题进行了优化。
GRPO过程
\(V\)函数的作用就是在计算优势函数\(A_t\)时是为了降低方差而被当做baseline,但是LLM的奖励模型的性质就决定了它只会为每个回答\(o\)的最后一个token分配奖励\(r\)而其余的token的奖励都是0,就是因为这个性质,我们很难在每个token处训练出准确的价值函数。
基于这个思想,GRPO决定不用\(V\)函数,而是在旧策略$ \pi_{\theta_{old}}$中采样多个输出,将输出的奖励平均值作为baseline来降低方差。
优化目标:
其中,\(\epsilon\) 和 \(\beta\) 是超参数,\(\hat{A}_{i,t}\) 是基于每个组内的相对回报计算的优势。GRPO 利用组相对方式计算优势,这与奖励模型的性质很吻合,因为奖励模型通常基于同一问题的输出比较的数据集进行训练。而KL散度也不再是添加到奖励函数里面了,而是直接添加在损失函数上,降低了优势函数\(\hat{A}_{i,t}\)计算的复杂性。
其中
与传统的KL散度计算方法不同,这里采用了无偏估计,使计算出来的惩罚项每一次都是正的。
其中\(\hat{A}_{i,t}\)计算方法如下:
相对于PPO来说精简了非常多,为了保证训练的稳定性,加了一个标准化。
GRPO的完整算法流程如下:
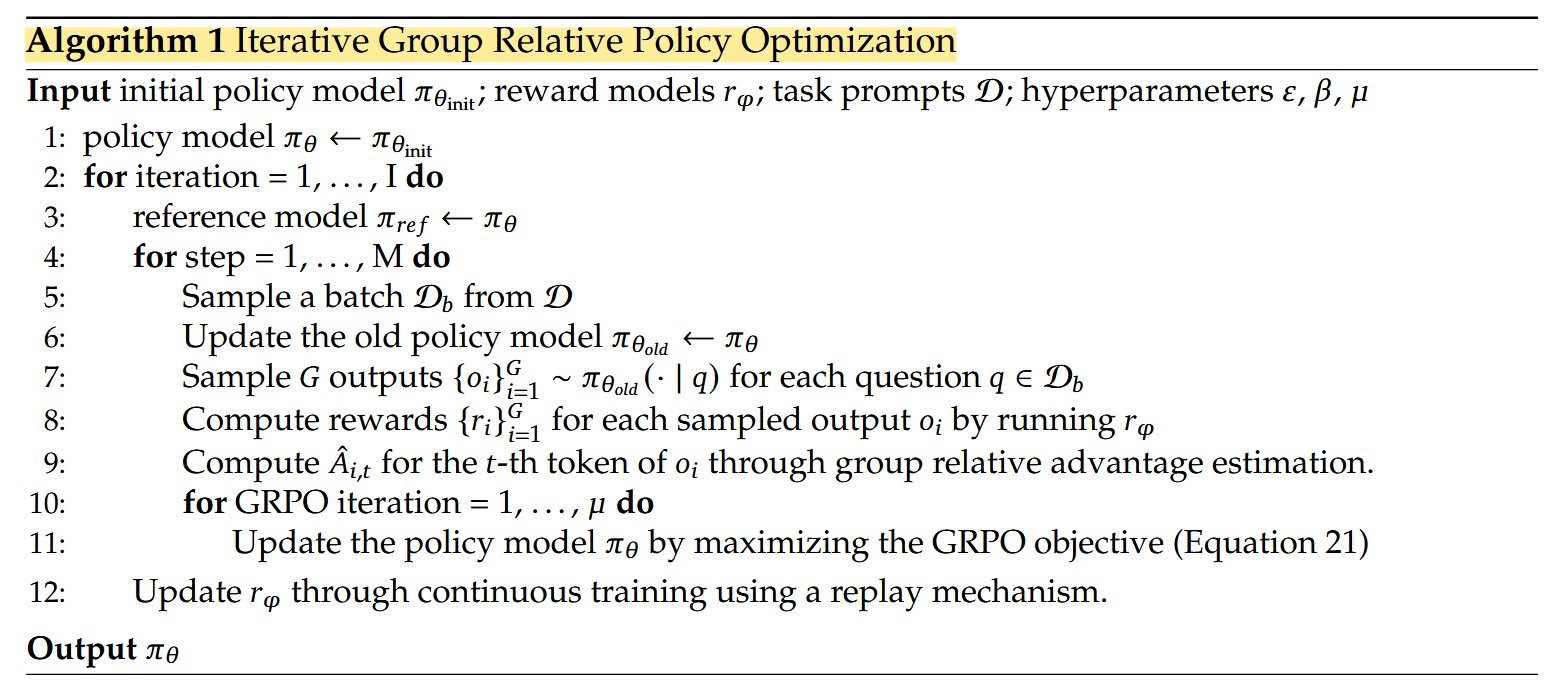
其中可以看到\(\pi_{ref}\)是最初的模型,在不会有变化,每次模型的变化都不能与\(\pi_{ref}\)差别过大,保证输出的质量。
总结
回顾开头给出的图片,黄色的是需要训练过程中更新参数的模型,蓝色的是不需要更新参数的模型,GRPO算法相对于PPO算法少训练了一个价值模型,而且大大简化了优势函数的计算,节约了计算资源。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号