1.声明
1.博主比较菜,只会二维。还只会OI常用的。
2.不要吐槽换行。
3.精度、圆周率:


1 const ld eps=1E-10; 2 const ld pi=acos(-1); 3 const ld inf=1E9;
有时要long double,有时要int。
4.正确判相等:
1 inline bool equal(double x,double y) 2 { 3 return abs(x-y)<=eps; 4 }
2.单元操作
1.点类:
1 struct pt 2 { 3 ld x,y; 4 int id; 5 pt(ld a=0,ld b=0,int c=0){x=a,y=b,id=c;} 6 pt operator+(const pt&A){return pt(x+A.x,y+A.y);} 7 pt operator-(const pt&A){return pt(x-A.x,y-A.y);} 8 pt operator*(ld d){return pt(x*d,y*d);} 9 pt operator/(ld d){return pt(x/d,y/d);} 10 ld operator*(const pt&A){return x*A.y-y*A.x;} 11 inline ld len()//返回长度 12 { 13 return sqrt(x*x+y*y); 14 } 15 inline ld angle()//返回弧度 16 { 17 return atan2(y,x); 18 } 19 void out(){cout<<"("<<x<<","<<y<<")";} 20 };
2.线类:
1 struct line 2 { 3 pt A,B; 4 line(pt x=pt(),pt y=pt()) 5 { 6 A=x,B=y; 7 } 8 };
3.圆类:
1 struct circle 2 { 3 pt O; 4 ld r; 5 circle(pt A=pt(),ld b=0):O(A),r(b){} 6 inline pt get(ld ra)//得到圆上的某个点 7 { 8 return pt(O.x+cos(ra)*r,O.y+sin(ra)*r); 9 } 10 };
4.判断方向的叉积,代表了以OB为参考,OA关于OB的方向。返回值为1代表OA在OB的顺时针方向上,-1代表逆时针,0代表共线:
1 inline int cross(pt A,pt B) 2 { 3 double d=A*B; 4 if(equal(d,0)) 5 return 0; 6 else if(d>eps) 7 return 1; 8 return -1; 9 }
5.两点之间的距离:
1 inline double s(double x) 2 { 3 return x*x; 4 } 5 inline double dis(pt A,pt B) 6 { 7 return sqrt(s(A.x-B.x)+s(A.y-B.y)); 8 }
6.两条直线的交点:
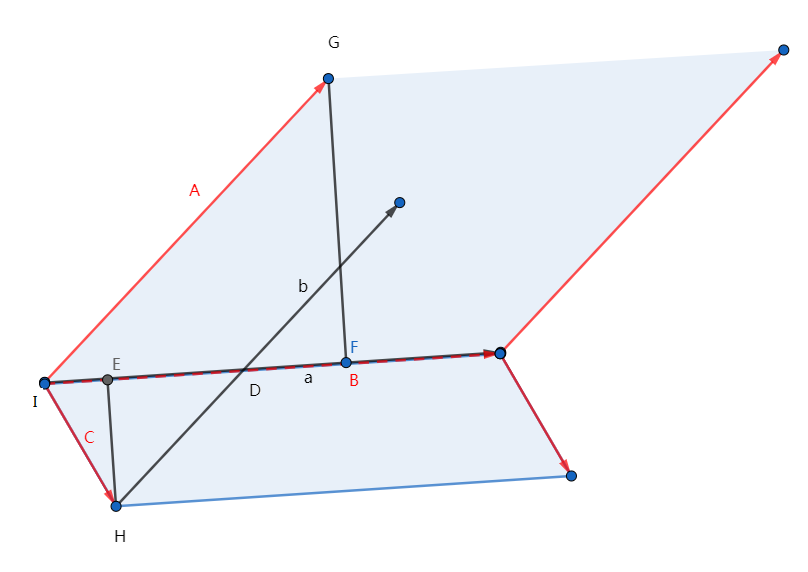
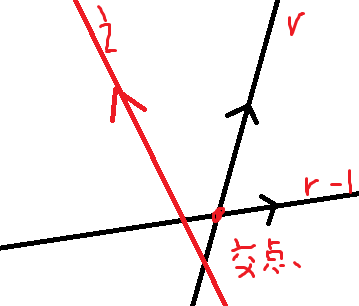
我们设求的是向量a和向量b的交点(图中有箭头,黑色实线的,a被红色的挡住了一部分)。我们先算出A=b终点-b起点,B=a终点-a起点,C=b起点-a起点,再将他们三个的起点拼到一起,移到a的起点(这只是图上的表述,实现不需要移动),ABC为左边标红的向量,中间一条为虚线。
我们在算出B叉A,C叉B,得到两个有向的平行四边形的面积,如图中蓝色部分。
再从H和G向a向量引垂线,得到垂足E和F。得到相似三角形DEH和IFG。此时平行四边形的面积比即为相似比。
这样我们可以得到HD与|A|的相似比(就是平行四边形面积比),将向量b乘上该相似比加到H上即可。
1 inline pt intersection(line a,line b) 2 { 3 pt A=b.B-b.A,B=a.B-a.A,C=b.A-a.A; 4 if(cross(A,B)==0) 5 return pt(inf,inf); 6 double d=-(B*C)/(B*A); 7 return b.A+A*d; 8 }
7.将A绕B逆时针旋转ra(弧度制,误差巨大):
1 inline pt rotate(pt A,pt B,double ra) 2 { 3 double x=A.x-B.x,y=A.y-B.y; 4 return pt(B.x+x*cos(ra)-y*sin(ra),B.y+x*sin(ra)+y*cos(ra)); 5 }
8.垂足:
1 inline pt foot(pt A,line a) 2 { 3 return intersection(line(A,A+pt(a.B.y-a.A.y,a.A.x-a.B.x)),a); 4 }
9.跨立实验:
1 inline bool seg(line a,line b) 2 { 3 return cross(a.A-b.A,b.B-b.A)*cross(a.B-b.A,b.B-b.A)==-1&& 4 cross(b.A-a.A,a.B-a.A)*cross(b.B-a.A,a.B-a.A)==-1; 5 }
10.圆的公切线:
1 inline int GCCI(circle A,circle B,vector<line>&wait) 2 { 3 int cnt=0; 4 if(A.r<B.r) 5 swap(A,B); 6 pt u=B.O-A.O; 7 ld d=u.len(),rD=A.r-B.r,rA=A.r+B.r; 8 cout<<d<<' '<<rD<<' '<<rA<<endl; 9 if(d-rD<0)//内含 10 return 0; 11 if(abs(d)<=eps&&abs(A.r-B.r)<=eps)//重合 12 return -1; 13 ld base=u.angle(); 14 if(abs(d-rD)<=eps)//内切,有些许爆精度的风险 15 { 16 cnt+=2; 17 wait.push_back(line(A.get(base),B.get(base+(1E-9)))); 18 return cnt; 19 } 20 ld da=acos((A.r-B.r)/d); 21 cnt+=2;//外公切线 22 wait.push_back(line(A.get(base+da),B.get(base+da))); 23 wait.push_back(line(A.get(base-da),B.get(base-da))); 24 if(abs(d-rA)<=eps)//1内公切线,有些许爆精度的风险 25 { 26 cnt+=1; 27 wait.push_back(line(A.get(base),B.get(base+pi+(1E-9)))); 28 } 29 else if(d-rA>eps)//2内公切线 30 { 31 da=acos((A.r+B.r)/d); 32 cnt+=2; 33 wait.push_back(line(A.get(base+da),B.get(base+da+pi))); 34 wait.push_back(line(A.get(base-da),B.get(base-da+pi))); 35 } 36 return cnt; 37 }
3.算法
1.极角排序求凸包:
1 pt O(0,0); 2 bool cmp(pt A,pt B) 3 { 4 double x=atan2(A.y-O.y,A.x-O.x),y=atan2(B.y-O.y,B.x-O.x); 5 if(equal(x,y)) 6 return dis(A,O)<dis(B,O); 7 return x<y; 8 } 9 vector<pt>convex(vector<pt>P) 10 { 11 int pos=0; 12 for(int i=1;i<P.size();++i) 13 if(P[i].x<P[pos].x) 14 pos=i; 15 swap(P[pos],P[0]); 16 O=P[0]; 17 sort(P.begin()+1,P.end(),cmp); 18 vector<pt>ans; 19 int now=0; 20 for(int i=0;i<P.size();++i) 21 { 22 while(now>1&&cross(P[i]-ans[now-2],ans[now-1]-ans[now-2])!=-1) 23 ans.pop_back(),--now; 24 ans.push_back(P[i]); 25 ++now; 26 } 27 return ans; 28 }
2.半平面交
这份代码只适用于最后答案不会是一条直线、一个点、一组平行线的情况。并且取的是每个向量逆时针方向上的半平面的交。而且使静态的。
先极角排序,每次插入一条直线相当于判断这样的情况:
若存在,弹出r。做完后对l进行同样的操作。
加入所有直线后也要更新答案,防止冗余的直线的出现。具体看代码。
1 inline bool cmpLine(line a,line b) 2 { 3 return atan2(a.A.y-a.B.y,a.A.x-a.B.x)<atan2(b.A.y-b.B.y,b.A.x-b.B.x); 4 } 5 inline bool onClockwise(line a,line b,line c)//b,c的交点在a顺时针方向 6 { 7 return cross(intersection(b,c)-a.A,a.B-a.A)==1; 8 } 9 inline bool isSame(line a,line b) 10 { 11 return cross(a.A-b.B,b.A-b.B)==0; 12 } 13 line wait[66666]; 14 vector<line>halfPlane(vector<line>A) 15 { 16 vector<line>ans; 17 sort(A.begin(),A.end(),cmpLine); 18 int l=1,r=0; 19 for(int i=0;i<A.size();++i) 20 { 21 while(l<r&&!isSame(A[i],wait[r])&&onClockwise(A[i],wait[r-1],wait[r])) 22 --r; 23 while(l<r&&!isSame(A[i],wait[l])&&onClockwise(A[i],wait[l],wait[l+1])) 24 ++l; 25 if(!isSame(A[i],wait[r])||r==0) 26 wait[++r]=A[i]; 27 else if(!onClockwise(wait[r],wait[r-1],A[i])) 28 wait[r]=A[i]; 29 } 30 while(l<r&&onClockwise(wait[l],wait[r],wait[r-1])) 31 --r; 32 while(l<r&&onClockwise(wait[r],wait[l],wait[l+1])) 33 ++l; 34 for(int i=l;i<=r;++i) 35 ans.push_back(wait[i]); 36 return ans; 37 }
3.平面图转对偶图:不多讲了,前面有。
这份代码只适用于所有面都联通的情况(包括用线段连起来的)。
1 const int maxn=55555; 2 pt P[maxn],waitP[maxn]; 3 bool visEdge[maxn*2],visP[maxn]; 4 int nextEdge[maxn*2],bel[maxn*2]; 5 struct edge 6 { 7 int to,next; 8 }; 9 struct graph//size从2开始 10 { 11 edge E[maxn*2]; 12 int size,cnt,head[maxn*2]; 13 graph() 14 { 15 size=1; 16 } 17 inline void add(int u,int v) 18 { 19 E[++size].to=v; 20 E[size].next=head[u]; 21 head[u]=size; 22 } 23 void getEdge(int u) 24 { 25 O=P[u]; 26 int tot=0; 27 for(int i=head[u];i;i=E[i].next) 28 { 29 int v=E[i].to; 30 waitP[++tot]=P[v]; 31 waitP[tot].id=i; 32 } 33 sort(waitP+1,waitP+tot+1,cmp); 34 for(int i=1;i<tot;++i) 35 nextEdge[waitP[i].id]=waitP[i+1].id; 36 nextEdge[waitP[tot].id]=waitP[1].id; 37 } 38 void init() 39 { 40 for(int i=2;i<=size;++i) 41 if(!visP[E[i].to]) 42 { 43 visP[E[i].to]=1; 44 getEdge(E[i].to); 45 } 46 } 47 void dfs(int u,int id,int color) 48 { 49 bel[id]=color; 50 visEdge[id]=1; 51 if(visEdge[nextEdge[id^1]]) 52 return; 53 dfs(E[nextEdge[id^1]].to,nextEdge[id^1],color); 54 } 55 void convert(graph&G) 56 { 57 map<pair<int,int>,bool>vis; 58 init(); 59 for(int i=2;i<=size;++i) 60 if(!visEdge[i]) 61 dfs(E[i].to,i,++cnt); 62 for(int i=2;i<=size;++i) 63 if(bel[i]!=bel[i^1]&&!vis[make_pair(bel[i],bel[i^1])]) 64 { 65 vis[make_pair(bel[i],bel[i^1])]=1; 66 G.add(bel[i],bel[i^1]); 67 } 68 } 69 }G,L;
4.完整代码
1 #include<bits/stdc++.h> 2 using namespace std; 3 typedef long double ld; 4 const ld eps=1E-16; 5 const ld pi=acos(-1); 6 const ld inf=1E9; 7 inline bool equal(ld x,ld y) 8 { 9 return abs(x-y)<=eps; 10 } 11 struct pt 12 { 13 ld x,y; 14 int id; 15 pt(ld a=0,ld b=0,int c=0){x=a,y=b,id=c;} 16 pt operator+(const pt&A){return pt(x+A.x,y+A.y);} 17 pt operator-(const pt&A){return pt(x-A.x,y-A.y);} 18 pt operator*(ld d){return pt(x*d,y*d);} 19 pt operator/(ld d){return pt(x/d,y/d);} 20 ld operator*(const pt&A){return x*A.y-y*A.x;} 21 void out(){cout<<"("<<x<<","<<y<<")";} 22 }; 23 struct line 24 { 25 pt A,B; 26 line(pt a=pt(),pt b=pt()) 27 { 28 A=a,B=b; 29 } 30 }; 31 inline int cross(pt A,pt B) 32 { 33 ld d=A*B; 34 if(equal(d,0)) 35 return 0; 36 return d>0?1:-1; 37 } 38 inline ld dis(pt A,pt B) 39 { 40 return sqrt((A.x-B.x)*(A.x-B.x)+(A.y-B.y)*(A.y-B.y)); 41 } 42 inline pt intersection(line a,line b) 43 { 44 pt A=b.B-b.A,B=a.B-a.A,C=b.A-a.A; 45 if(cross(A,B)==0) 46 return pt(inf,inf); 47 ld d=-(B*C)/(B*A); 48 return b.A+A*d; 49 } 50 inline pt foot(pt A,line a) 51 { 52 return intersection(line(A,A+pt(a.B.y-a.A.y,a.A.x-a.B.x)),a); 53 } 54 inline bool seg(line a,line b) 55 { 56 return cross(a.A-b.A,b.B-b.A)*cross(a.B-b.A,b.B-b.A)==-1&& 57 cross(b.A-a.A,a.B-a.A)*cross(b.B-a.A,a.B-a.A)==-1; 58 } 59 pt O(0,0); 60 bool cmp(pt A,pt B) 61 { 62 ld x=atan2(A.y-O.y,A.x-O.x),y=atan2(B.y-O.y,B.x-O.x); 63 if(equal(x,y)) 64 return dis(A,O)<dis(B,O); 65 return x<y; 66 } 67 vector<pt>convex(vector<pt>P) 68 { 69 int pos=0; 70 for(int i=1;i<P.size();++i) 71 if(P[i].x<P[pos].x) 72 pos=i; 73 swap(P[pos],P[0]); 74 O=P[0]; 75 sort(P.begin()+1,P.end(),cmp); 76 vector<pt>ans; 77 int now=0; 78 for(int i=0;i<P.size();++i) 79 { 80 while(now>1&&cross(P[i]-ans[now-2],ans[now-1]-ans[now-2])!=-1) 81 ans.pop_back(),--now; 82 ans.push_back(P[i]); 83 ++now; 84 } 85 return ans; 86 } 87 inline bool cmpLine(line a,line b) 88 { 89 return atan2(a.A.y-a.B.y,a.A.x-a.B.x)<atan2(b.A.y-b.B.y,b.A.x-b.B.x); 90 } 91 inline bool onClockwise(line a,line b,line c)//b,c的交点在a顺时针方向 92 { 93 return cross(intersection(b,c)-a.A,a.B-a.A)==1; 94 } 95 inline bool isSame(line a,line b) 96 { 97 return cross(a.A-b.B,b.A-b.B)==0; 98 } 99 line wait[66666]; 100 vector<line>halfPlane(vector<line>A) 101 { 102 vector<line>ans; 103 sort(A.begin(),A.end(),cmpLine); 104 int l=1,r=0; 105 for(int i=0;i<A.size();++i) 106 { 107 while(l<r&&!isSame(A[i],wait[r])&&onClockwise(A[i],wait[r-1],wait[r])) 108 --r; 109 while(l<r&&!isSame(A[i],wait[l])&&onClockwise(A[i],wait[l],wait[l+1])) 110 ++l; 111 if(!isSame(A[i],wait[r])||r==0) 112 wait[++r]=A[i]; 113 else if(!onClockwise(wait[r],wait[r-1],A[i])) 114 wait[r]=A[i]; 115 } 116 while(l<r&&onClockwise(wait[l],wait[r],wait[r-1])) 117 --r; 118 while(l<r&&onClockwise(wait[r],wait[l],wait[l+1])) 119 ++l; 120 for(int i=l;i<=r;++i) 121 ans.push_back(wait[i]); 122 return ans; 123 } 124 inline ld length(vector<pt>P) 125 { 126 ld sum=0; 127 for(int i=1;i<P.size();++i) 128 sum+=dis(P[i-1],P[i]); 129 sum+=dis(P[P.size()-1],P[0]); 130 return sum; 131 } 132 ////////////////////////////////////////////////////////////////////////////////////////////// 133 const int maxn=55555; 134 pt P[maxn],waitP[maxn]; 135 bool visEdge[maxn*2],visP[maxn]; 136 int nextEdge[maxn*2],bel[maxn*2]; 137 struct edge 138 { 139 int to,next; 140 }; 141 struct graph//size从2开始 142 { 143 edge E[maxn*2]; 144 int size,cnt,head[maxn*2]; 145 graph() 146 { 147 size=1; 148 } 149 inline void add(int u,int v) 150 { 151 E[++size].to=v; 152 E[size].next=head[u]; 153 head[u]=size; 154 } 155 void getEdge(int u) 156 { 157 O=P[u]; 158 int tot=0; 159 for(int i=head[u];i;i=E[i].next) 160 { 161 int v=E[i].to; 162 waitP[++tot]=P[v]; 163 waitP[tot].id=i; 164 } 165 sort(waitP+1,waitP+tot+1,cmp); 166 for(int i=1;i<tot;++i) 167 nextEdge[waitP[i].id]=waitP[i+1].id; 168 nextEdge[waitP[tot].id]=waitP[1].id; 169 } 170 void init() 171 { 172 for(int i=2;i<=size;++i) 173 if(!visP[E[i].to]) 174 { 175 visP[E[i].to]=1; 176 getEdge(E[i].to); 177 } 178 } 179 void dfs(int u,int id,int color) 180 { 181 bel[id]=color; 182 visEdge[id]=1; 183 if(visEdge[nextEdge[id^1]]) 184 return; 185 dfs(E[nextEdge[id^1]].to,nextEdge[id^1],color); 186 } 187 void convert(graph&G) 188 { 189 map<pair<int,int>,bool>vis; 190 init(); 191 for(int i=2;i<=size;++i) 192 if(!visEdge[i]) 193 dfs(E[i].to,i,++cnt); 194 for(int i=2;i<=size;++i) 195 if(bel[i]!=bel[i^1]&&!vis[make_pair(bel[i],bel[i^1])]) 196 { 197 vis[make_pair(bel[i],bel[i^1])]=1; 198 G.add(bel[i],bel[i^1]); 199 } 200 } 201 }G,L; 202 ////////////////////////////////////////////////////////////////////////////////////////////// 203 int main() 204 { 205 ios::sync_with_stdio(false); 206 return 0; 207 }
 posted on
posted on

 浙公网安备 33010602011771号
浙公网安备 33010602011771号