
docker容器自动化部署(一)
1、docker容器暴露多个端口
To expose just one port, this is what you need to do:
docker run -p <host_port>:<container_port>
To expose multiple ports, simply provide multiple -p arguments:
docker run -p <host_port1>:<container_port1> -p <host_port2>:<container_port2>
或者你可以直接桥接网络,然后在dockerfile上面直接expose你所需要的端口,这样可以免去-p参数
2、gitlab-runner自动化部署
3.1、注册runner
命令:sudo gitlab-ci-multi-runner register
➜ ~ sudo gitlab-ci-multi-runner register Running in system-mode. Please enter the gitlab-ci coordinator URL (e.g. https://gitlab.com/): http://193.188.2.40/ Please enter the gitlab-ci token for this runner: Xyx8EEd4YeaMSLv7Snh7 Please enter the gitlab-ci description for this runner: [sti-DL]: sdk_AutoDeploy Please enter the gitlab-ci tags for this runner (comma separated): sdk_AutoDeploy Whether to run untagged builds [true/false]: [false]: true Whether to lock Runner to current project [true/false]: [false]: true Registering runner... succeeded runner=Xyx8EEd4 Please enter the executor: shell, docker+machine, docker-ssh+machine, docker-ssh, parallels, ssh, virtualbox, kubernetes, docker: docker Please enter the default Docker image (e.g. ruby:2.1): dockerName:v1.0.0 Runner registered successfully. Feel free to start it, but if it's running already the config should be automatically reloaded!
3.2、docker 挂载宿主的GPU驱动、cuda设备文件
通过gitlab-ci-multi-runner register注册的Runner配置会存储在/etc/gitlab-runner/config.toml配置文件中,项目中的SDK需要调用英伟达显卡驱动和cuda,通过修改配置文件使得gitlab-runner启动容器时自动加载驱动和cuda。具体配置如下:
...
1)、gitlab-runner启动容器时挂载宿主机驱动的方法
.gitlab-ci.yml文件 gitlab-runner启动容器默认配置文件是不挂载宿主机上的NVIDIA驱动的,若想gitlab-ci启动容器挂载驱动,可以通过下面的方法:
修改在*****目录下的config.toml配置文件。
如下:
[[runners]]
name = "my-runner2"
url = "http://182.158.10.30/"
token = "d67392c2aa868f95ddd0256eb42b1b"
executor = "docker"
[runners.docker]
tls_verify = false
image = "127.0.0.1:5000/rs-sdk-test"
privileged = false
devices = ["/dev/nvidia0:/dev/nvidia0","/dev/nvidiactl:/dev/nvidiactl","/dev/nvidia-uvm","/dev/mem:/dev/mem"]
disable_cache = false
volumes = ["/cache"]
shm_size = 0
[runners.cache]
主要是添加devices一行,gitlabrunner启动的容器就会自动挂载宿主机上的NVIDIA驱动。
2)、在终端上启动容器挂载驱动和cuda的方法
sudo docker
run -it --name NAME -v /home/:/mnt/home --privileged=true --device
/dev/nvidia-uvm:/dev/nvidia-uvm --device /dev/nvidia0:/dev/nvidia0
--device /dev/nvidiactl:/dev/nvidiactl myconda:cuda bash
sudo
docker run --privileged=true --device /dev/nvidia0:/dev/nvidia0
--device /dev/nvidiactl:/dev/nvidiactl --device
/dev/nvidia-uvm:/dev/nvidia-uvm --device /dev/mem:/dev/mem -it
127.0.0.1:5000/rs-sdk-test:latest
3.3、在master分支中添加.gitlab-ci.yml
.gitlab-ci.yml文件的格式有特定的语法规则,详细语法见官方文档。本项目中的.yml文件如下:
image: localhost:5000/***:v1.0.0 before_script: - echo "hello world!" stages: - build - test job1: stage: build script: - nvidia-smi - cat /usr/local/cuda/version.txt - export OpenCV_DIR=/opt/ros/kinetic/include/opencv-3.3.1-dev - source /opt/ros/kinetic/setup.bash - cd /builds/rs_ws_test/ - ls # - sh /builds/rs_ws_test/rs_perception/compileRos.sh - cd ~/PerceptionSDK/rs_ws_2.2.0/src - ls - rm -rf ~/PerceptionSDK/rs_ws_2.2.0/src/rs_perception - ls # - gnome-terminal -x ~/PerceptionSDK/rs_ws_2.2.0/roscore # - gnome-terminal -x ~/PerceptionSDK/rs_ws_2.2.0/rosparam list # - gnome-terminal -x ~/PerceptionSDK/rs_ws_2.2.0/rosparam get/rosdistro - mv /builds/rs_ws_test/rs_perception ~/PerceptionSDK/rs_ws_2.2.0/src/ - mv ~/PerceptionSDK/rs_ws_2.2.0/src/rs_perception/tensorRT ~/PerceptionSDK/rs_ws_2.2.0/src/rs_perception/tensorRT10 - mv ~/PerceptionSDK/rs_ws_2.2.0/src/rs_perception/tensorRT9 ~/PerceptionSDK/rs_ws_2.2.0/src/rs_perception/tensorRT - cd ~/PerceptionSDK/rs_ws_2.2.0 - catkin_make - echo "hello world!" tags: - perception-runner
3.4、写完.yaml配置文件后遇到下面这个问题
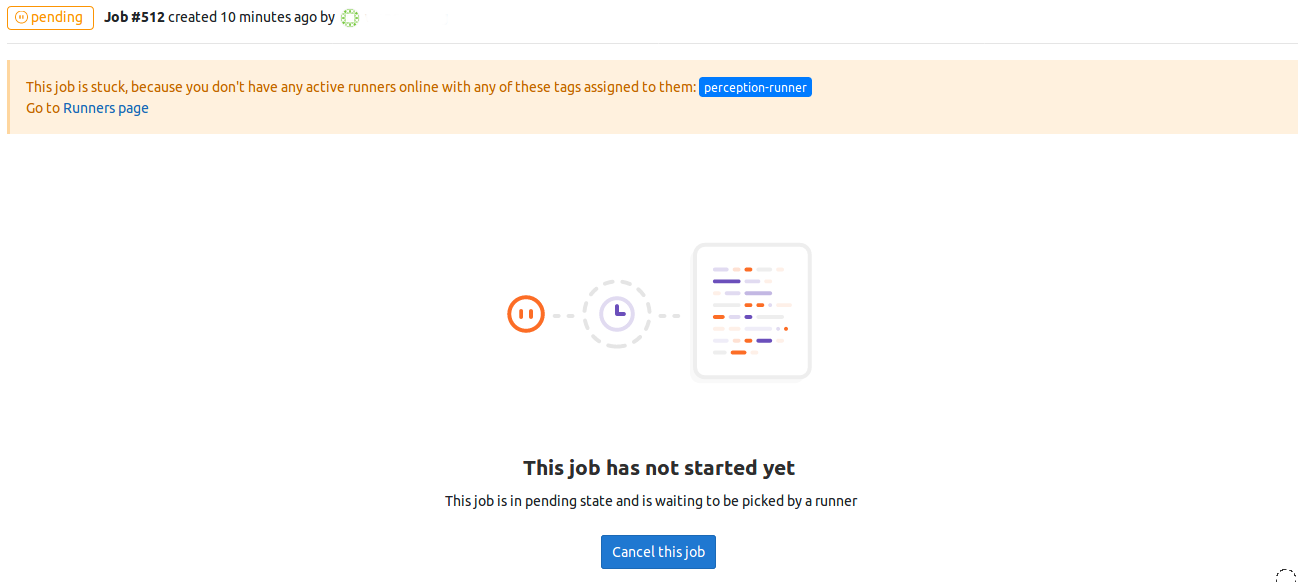
解决方法:搞定在写。。。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号