

PLE模型简洁解读
PLE模型简洁解读
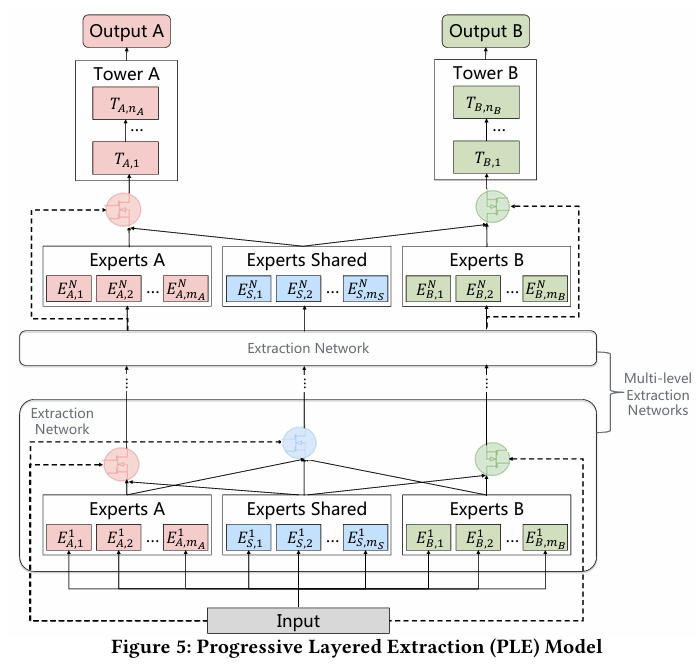
基础设定
- 有 2 个任务:CTR、CVR
- 使用 1 层 PLE(num_levels = 1)
- 每个任务 2 个任务特定专家(specific_expert_num = 2)
- 有 1 个共享专家(shared_expert_num = 1)
- 输入 embedding 是:[batch_size, 64] 的拼接向量
我们来看看“这一层”里的每一个步骤数据是如何流动的。
第 1 步:准备输入
ple_inputs = [x_ctr, x_cvr, x_shared]
- x_ctr = CTR 的输入 = 原始 embedding 向量 [B, 64]
- x_cvr = CVR 的输入 = 同上
- x_shared = Shared 的输入 = 同上
注意:这三个向量在第 1 层是一样的,但在后续层会变得不同。
第 2 步:任务专家和共享专家网络
每个任务的 experts:
每个任务有 2 个 specific expert,输入是自己:
- CTR 的两个专家 → 输入
x_ctr→ 输出[B, 64] - CVR 的两个专家 → 输入
x_cvr→ 输出[B, 64]
共享 experts:
只有 1 个共享专家,输入是 x_shared,输出 [B, 64]
第 3 步:Gate 网络
我们看 CTR 任务的 gate 是怎么处理的:
CTR 的 gate 做了什么?
-
输入:
x_ctr→ shape[B, 64] -
过一个小 DNN: 输出变为
[B, H](比如 H=32) -
线性变换 + softmax: 输出为
[B, 3],表示对 3 个专家的权重:- expert_1_ctr
- expert_2_ctr
- expert_shared
gate_input = DNN(...)(x_ctr) # [B, 32]
gate_weights = Dense(3, activation='softmax')(gate_input) # [B, 3]
第 4 步:Gate × Experts
将所有专家输出堆叠:
expert_outputs = tf.stack([expert_1_ctr, expert_2_ctr, expert_shared], axis=1) # [B, 3, 64]
将 gate 权重 reshape:
gate_weights = tf.expand_dims(gate_weights, -1) # [B, 3, 1]
点乘加权求和:
fused_output = tf.reduce_sum(expert_outputs * gate_weights, axis=1) # [B, 64]
✅ 这就是 CTR 任务在这一层提取到的特征,来自自己和共享专家的动态组合。
CVR 任务也完全一样,只是换成用 x_cvr 输入,构建自己的 gate 和专家融合。
下一层(若存在):
然后这些输出(fused_output_ctr, fused_output_cvr, fused_output_shared)会作为下一层的输入,继续重复这一机制。
每一层都会重新生成:
- 专家网络(不同任务分开)
- gate(使用该层输入为条件)
从而实现「逐层提纯」。
Gate 的本质:
Gate 是一个小的 DNN 网络,输入是当前任务的 embedding,输出是对所有专家的 softmax 权重
决定了“这个任务现在要听谁的话”
PLE的pytorch实现
class Expert(nn.Module):
def __init__(self, input_dim, expert_dim):
super(Expert, self).__init__()
self.layer = nn.Sequential(
nn.Linear(input_dim, expert_dim),
nn.ReLU(),
nn.BatchNorm1d(expert_dim),
nn.Dropout(0.2)
)
def forward(self, x):
return self.layer(x)
class Gate(nn.Module):
def __init__(self, input_dim, n_experts):
super(Gate, self).__init__()
self.gate = nn.Sequential(
nn.Linear(input_dim, n_experts),
nn.Softmax(dim=-1)
)
def forward(self, x):
weights = self.gate(x) # [B, n_experts]
return weights.unsqueeze(-1) # [B, n_experts, 1]
class PLELayer(nn.Module):
def __init__(self, input_dim, expert_dim, n_tasks, n_task_experts, n_shared_experts):
super(PLELayer, self).__init__()
self.n_tasks = n_tasks
self.task_experts = nn.ModuleList([
nn.ModuleList([Expert(input_dim, expert_dim) for _ in range(n_task_experts)])
for _ in range(n_tasks)
])
self.shared_experts = nn.ModuleList([
Expert(input_dim, expert_dim) for _ in range(n_shared_experts)
])
self.task_gates = nn.ModuleList([
Gate(input_dim, n_task_experts + n_shared_experts)
for _ in range(n_tasks)
])
self.shared_gate = Gate(input_dim, n_tasks * n_task_experts + n_shared_experts)
def forward(self, task_inputs, shared_input):
# Compute expert outputs
task_outputs = []
for i in range(self.n_tasks):
task_outputs.append([expert(task_inputs[i]) for expert in self.task_experts[i]])
shared_outputs = [expert(shared_input) for expert in self.shared_experts]
# Task-specific gate outputs
next_task_inputs = []
for i in range(self.n_tasks):
all_expert_outputs = task_outputs[i] + shared_outputs
stacked = torch.stack(all_expert_outputs, dim=1) # [B, n_experts, D]
weights = self.task_gates[i](task_inputs[i]) # [B, n_experts, 1]
fused = torch.sum(stacked * weights, dim=1) # [B, D]
next_task_inputs.append(fused)
# Shared gate output (for next layer's shared input)
flat_all_experts = sum(task_outputs, []) + shared_outputs
stacked_shared = torch.stack(flat_all_experts, dim=1)
shared_weights = self.shared_gate(shared_input)
next_shared_input = torch.sum(stacked_shared * shared_weights, dim=1) # [B, D]
return next_task_inputs, next_shared_input
class PLE(nn.Module):
# 正确处理多层维度
def __init__(self, input_dim, expert_dim, n_tasks=3, n_layers=2,
n_task_experts=2, n_shared_experts=1):
super(PLE, self).__init__()
self.n_tasks = n_tasks
self.ple_layers = nn.ModuleList()
# 为每一层设置正确的输入维度
for layer_idx in range(n_layers):
if layer_idx == 0:
# 第一层:使用原始输入维度
current_input_dim = input_dim
else:
# 后续层:使用expert输出维度作为输入
current_input_dim = expert_dim
self.ple_layers.append(
PLELayer(
input_dim=current_input_dim, # 动态设置输入维度
expert_dim=expert_dim,
n_tasks=n_tasks,
n_task_experts=n_task_experts,
n_shared_experts=n_shared_experts
)
)
def forward(self, x):
# Initial input: shared across all tasks and shared experts
task_inputs = [x for _ in range(self.n_tasks)]
shared_input = x
for layer in self.ple_layers:
task_inputs, shared_input = layer(task_inputs, shared_input)
return task_inputs # final task-specific vectors [task1_repr, task2_repr, task3_repr]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号