Cifar100数据集基于Renet18分类
Cifar100数据集分类
训练环境:
python3.8
CPU Intel(R) Core(TM) i7-9750H CPU
1.cifar100数据集介绍
这个数据集与CIFAR-10类似,它有100个类,每个类包含600个图像。每类各有500个训练图像和100个测试图像。CIFAR-100中的100个类被分成20个超类。每个图像都带有一个“精细”标签(它所属的类)和一个“粗糙”标签(它所属的超类)
以下是CIFAR-100中的类别列表:
文件介绍:
 (下载文件如图)
(下载文件如图)
meta:类名的序列保存位置
train:训练集
test:测试集
| 超类(粗分) | 类别(细分) |
|---|---|
| 水生哺乳动物 | 海狸,海豚,水獭,海豹,鲸鱼 |
| 鱼 | 水族馆的鱼,比目鱼,射线,鲨鱼,鳟鱼 |
| 花卉 | 兰花,罂粟花,玫瑰,向日葵,郁金香 |
| 食品容器 | 瓶子,碗,罐子,杯子,盘子 |
| 水果和蔬菜 | 苹果,蘑菇,橘子,梨,甜椒 |
| 家用电器 | 时钟,电脑键盘,台灯,电话机,电视机 |
| 家用家具 | 床,椅子,沙发,桌子,衣柜 |
| 昆虫 | 蜜蜂,甲虫,蝴蝶,毛虫,蟑螂 |
| 大型食肉动物 | 熊,豹,狮子,老虎,狼 |
| 大型人造户外用品 | 桥,城堡,房子,路,摩天大楼 |
| 大自然的户外场景 | 云,森林,山,平原,海 |
| 大杂食动物和食草动物 | 骆驼,牛,黑猩猩,大象,袋鼠 |
| 中型哺乳动物 | 狐狸,豪猪,负鼠,浣熊,臭鼬 |
| 非昆虫无脊椎动物 | 螃蟹,龙虾,蜗牛,蜘蛛,蠕虫 |
| 人 | 宝贝,男孩,女孩,男人,女人 |
| 爬行动物 | 鳄鱼,恐龙,蜥蜴,蛇,乌龟 |
| 小型哺乳动物 | 仓鼠,老鼠,兔子,母老虎,松鼠 |
| 树木 | 枫树,橡树,棕榈,松树,柳树 |
| 车辆1 | 自行车,公共汽车,摩托车,皮卡车,火车 |
| 车辆2 | 割草机,火箭,有轨电车,坦克,拖拉机 |
ResNet(Residual Neural Network)来源于微软研究院的Kaiming He等人的论文《Deep Residual Learning for Image Recognition》。ResNet-18的网络简图如下图(假设网络的输入的张量的形状为3 × 64 × 64 3\times 64\times 643×64×64)

resnet18:
代码简介
1.用到的库
trans = transforms.ToTensor()
train = torchvision.datasets.CIFAR100(
root="../data1", train=True, transform=trans, download=True)
test = torchvision.datasets.CIFAR100(
root="../data1", train=False, transform=trans, download=True)

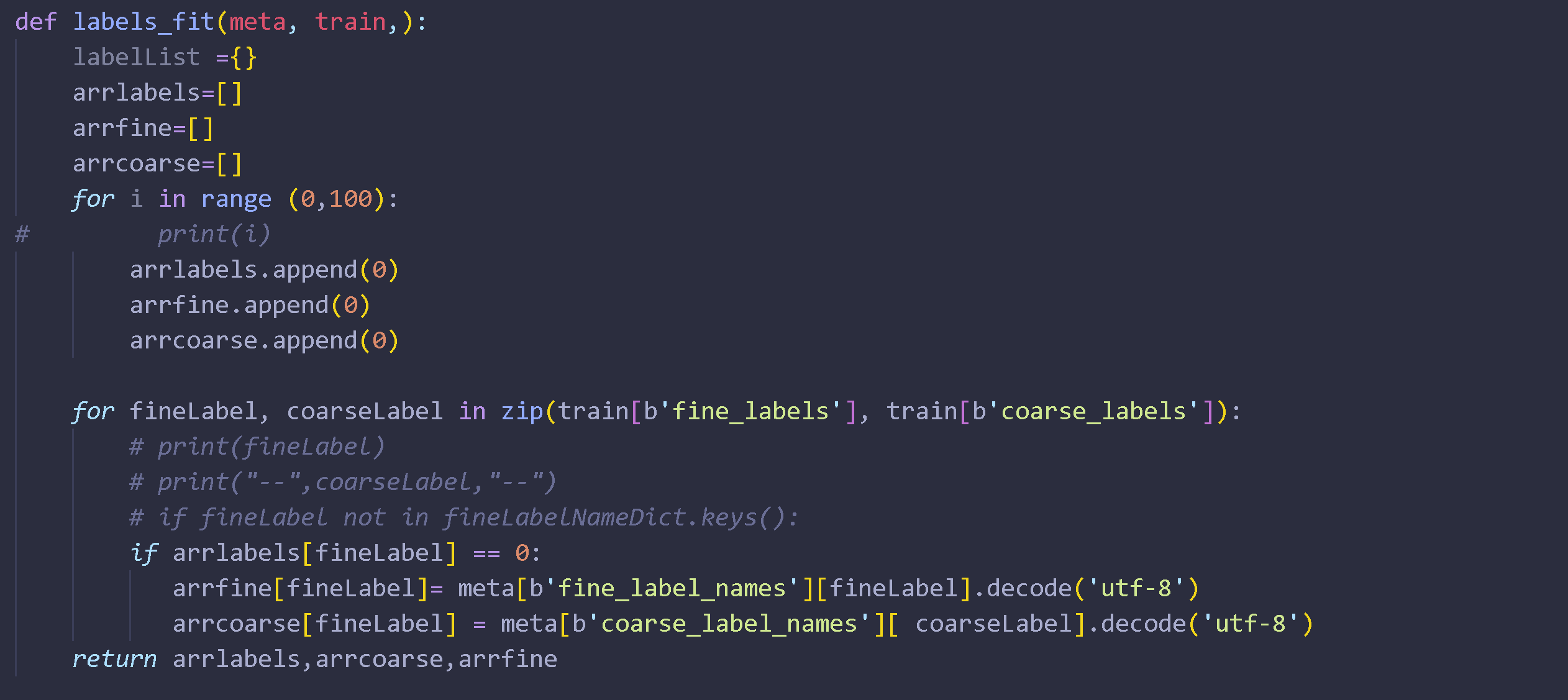
3.标签匹配
4.renet18(利用pytorch)

5.训练优化-SGD(随机梯度下降)

6.训练代码


参数:num_epochs, lr, wd =5,2e-4, 5e-4,
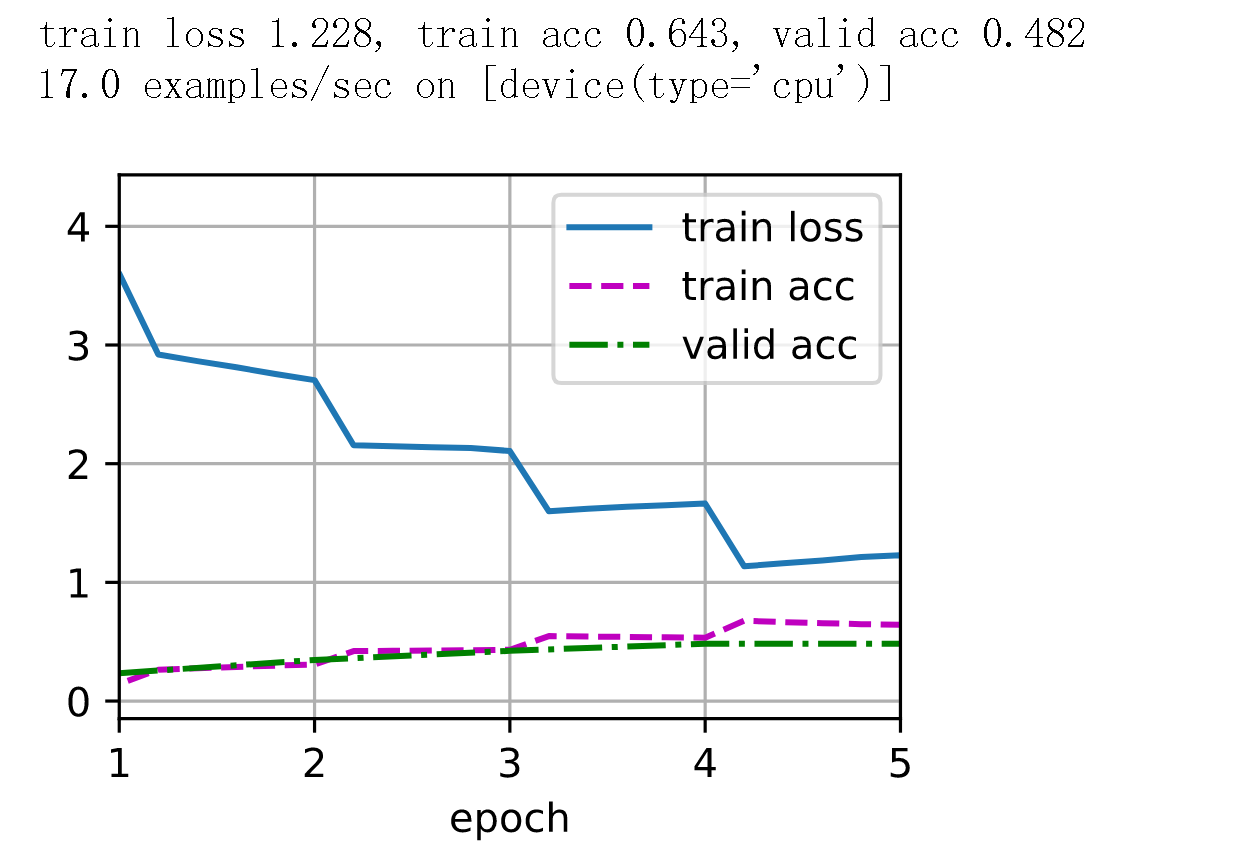
参数:num_epochs, lr, wd =6,2e-4, 5e-4,


 浙公网安备 33010602011771号
浙公网安备 33010602011771号