2025dsfz Day2 树-杂题做题记录
树的DFS遍历
- 先用链式前向星存,然后DFS遍历一遍。
板子如下:
#include <bits/stdc++.h>
using namespace std;
int n,x,y,z,pre[110],k;
struct node{
int to,len,nxt;
}a[220];
void add(int u,int v,int l){
a[++k] = {v,l,pre[u]};
pre[u] = k;
}
void dfs(int x,int fa){
for(int i = pre[x];i;i = a[i].nxt){
if(a[i].to != fa) dfs(a[i].to,x);
}
}
int main(){
cin>>n;
for(int i = 1;i < n;i++){
cin>>x>>y>>z;
add(x,y,z);
add(y,x,z);
}
dfs(1,0/*!Tips!*/);
}
P1364 医院设置
- 我们定义
int dfs(int x,int fa,int dis)计算路径和。\(dis\) 代表从起点到当前节点的边权和。
#include <bits/stdc++.h>
using namespace std;
int n, x, y, z, pre[110], val[110], k;
struct node {
int to, len, nxt;
} a[220];
void add(int u, int v, int l) {
a[++k] = {v, l, pre[u]};
pre[u] = k;
}
int dfs(int x, int fa, int dis) {
int res = dis * val[x];
for (int i = pre[x]; i; i = a[i].nxt) {
if (a[i].to != fa) {
res += dfs(a[i].to, x, dis + a[i].len);
}
}
return res;
}
int main() {
cin >> n;
for (int i = 1; i <= n; i++) {
int lc, rc; //left connect,right connect
cin >> val[i] >> lc >> rc;//猎奇输入
if (lc) {
add(i, lc, 1);
add(lc, i, 1);
}
if (rc) {
add(i, rc, 1);
add(rc, i, 1);
}
}
int ans = INT_MAX;
for (int i = 1; i <= n; i++) {
ans = min(ans, dfs(i, 0, 0));
}
cout<<ans<<endl;
}
树的直径
做法 1. 两次 DFS
过程
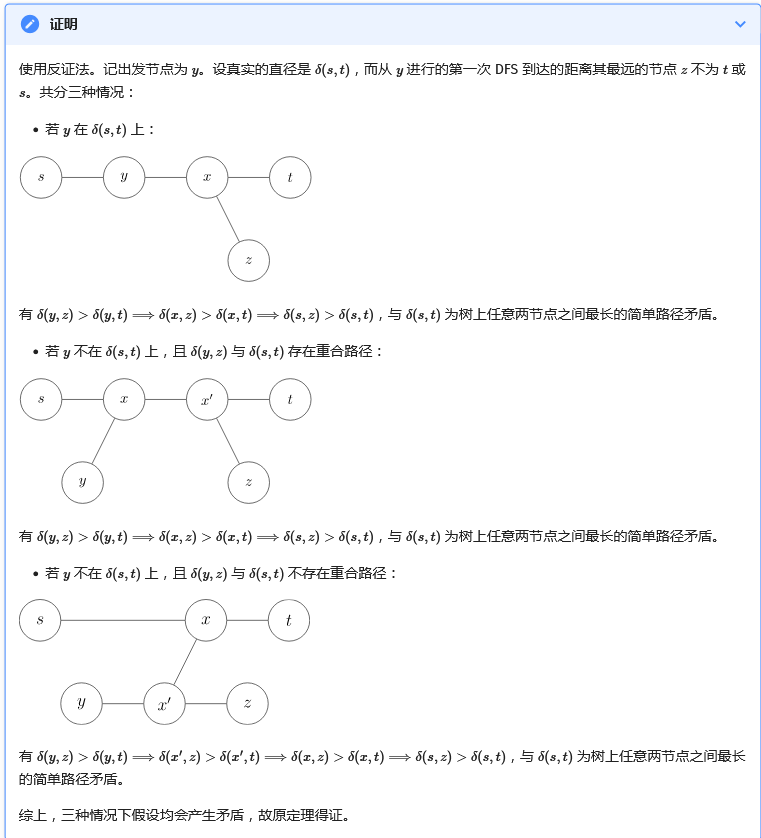
首先从任意节点 \(y\) 开始进行第一次 DFS,到达距离其最远的节点,记为 \(z\),然后再从 \(z\) 开始做第二次 DFS,到达距离 \(z\) 最远的节点,记为 \(z'\),则 \(\delta(z,z')\) 即为树的直径。
显然,如果第一次 DFS 到达的节点 \(z\) 是直径的一端,那么第二次 DFS 到达的节点 \(z'\) 一定是直径的一端。我们只需证明在任意情况下,\(z\) 必为直径的一端。
定理:在一棵树上,从任意节点 \(y\) 开始进行一次 DFS,到达的距离其最远的节点 \(z\) 必为直径的一端。
证明
OI Wiki
Warning 负权边
上述证明过程建立在所有路径均不为负的前提下。如果树上存在负权边,则上述证明不成立。故若存在负权边,则无法使用两次 DFS 的方式求解直径。
#include <bits/stdc++.h>
using namespace std;
struct node {
int to, nxt;
} a[4001010];
int dep[2000010];
int pre[2000010], k, n;
int x, y;
void add(int u, int v) {
a[++k] = {v, pre[u]};
pre[u] = k;
}
void dfs(int x, int fa) {
for (int i = pre[x]; i; i = a[i].nxt) {
int to = a[i].to;
if (to != fa) {
dep[to] = dep[x] + 1;
dfs(to, x);
}
}
}
int main() {
cin >> n;
for (int i = 1; i < n; i++) {
cin >> x >> y;
add(x, y);
add(y, x);
}
dep[1] = 0;
dfs(1, 0);
int ma = 0, mai;
for (int i = 1; i <= n; i++) {
if (dep[i] > ma) {
ma = dep[i];
mai = i;
}
}
dep[mai] = 0;
dfs(mai, 0);
int maxx = 0;
for (int i = 1; i <= n; i++) {
maxx = max(maxx, dep[i]);
}
cout << maxx;
}
求先序序列
- 递归水过,后序的最后一个字母就是当前的根节点,然后在中序中以根节点为中心分成两个子树再进行递归即可。
#include <bits/stdc++.h>
using namespace std;
struct node {
int to, nxt;
} a[4001010];
int dep[2000010];
int pre[2000010], k, n;
int x, y;
void add(int u, int v) {
a[++k] = {v, pre[u]};
pre[u] = k;
}
void dfs(int x, int fa) {
for (int i = pre[x]; i; i = a[i].nxt) {
int to = a[i].to;
if (to != fa) {
dep[to] = dep[x] + 1;
dfs(to, x);
}
}
}
int main() {
cin >> n;
for (int i = 1; i < n; i++) {
cin >> x >> y;
add(x, y);
add(y, x);
}
dep[1] = 0;
dfs(1, 0);
int ma = 0, mai;
for (int i = 1; i <= n; i++) {
if (dep[i] > ma) {
ma = dep[i];
mai = i;
}
}
dep[mai] = 0;
dfs(mai, 0);
int maxx = 0;
for (int i = 1; i <= n; i++) {
maxx = max(maxx, dep[i]);
}
cout << maxx;
}
P1827 [USACO3.4] 美国血统 American Heritage
- 跟上一题同理。
#include <bits/stdc++.h>
using namespace std;
void dfs(string s1, string s2) {
if (s1.size() <= 0) return ;
char mid = s2[0];//root
int div = s1.find(mid);
dfs(s1.substr(0, div), s2.substr(1, div));
dfs(s1.substr(div+1), s2.substr(div+1));
cout << mid;
}
int main() {
string s1, s2;
cin >> s1 >> s2;
dfs(s1, s2);
}//
[!Important] P2680 [NOIP 2015 提高组] 运输计划
- 如果你没有思路建议看 这个题解 ,这个写的很有实力。
关于题解的梳理和总结: By DS
问题描述
给定一棵 \(n\) 个节点的树和 \(m\) 条运输路径,要求选择一条边将其权值置零,使得所有路径的最大耗时最小化。
算法思路
- 二分答案框架
- 设当前检查的答案为 \(T\),判断是否存在一条边,置零后所有路径长度 \(\leq T\)。
- 关键性质:所有长度 \(> T\) 的路径必须共用被置零的边。
- 可行性检查(
check(T))
- 步骤1:统计超限路径(长度 \(> T\))的数量 \(k\)。
- 步骤2:用树上差分标记这些路径覆盖的边。
- 步骤3:检查是否存在边满足:
- 被所有超限路径覆盖(覆盖次数 \(= k\))。
- 边权 \(w \geq \max(\text{路径长度}) - T\)。
- 技术实现
- LCA计算:倍增法预处理,单次查询 \(O(\log n)\)。
- 路径长度公式:
\[\text{dis}(u, v) = \text{dist}[u] + \text{dist}[v] - 2 \times \text{dist}[\text{LCA}(u, v)]
\]
- 树上差分:
- 对路径 \((u, v)\):
cnt[u]++,cnt[v]++,cnt[LCA(u,v)] -= 2。 - DFS汇总后,
cnt[x]表示边 \((\text{父节点}, x)\) 被覆盖的次数。
复杂度分析
- 预处理:
- LCA倍增表:\(O(n \log n)\) 时间,\(O(n \log n)\) 空间。
- 路径长度计算:\(O(m \log n)\)。
- 单次
check:\(O(n + m)\)。 - 总复杂度:\(O((n + m) \log T)\),其中 \(T\) 为最大路径长度。
关键优化
- 二分边界:
- 下界 \(L = 0\),上界 \(R = \max(\text{路径长度})\)。
- 每次调整:
\[\begin{cases}
R = \text{mid} - 1 & \text{if } \text{check}(\text{mid}) = \text{true}, \\
L = \text{mid} + 1 & \text{otherwise}.
\end{cases}
\]
- 差分数组重置:
- 每次
check前清零,避免全局数组反复初始化。
正确性证明
- 充分性:若存在满足条件的边,置零后所有路径长度 \(\leq T\)。
- 必要性:若 \(T\) 可行,则必须存在这样的边。
注意事项
- 根节点选择:任意选根(如节点1),不影响LCA和路径计算。
- 边权处理:通过子节点存储父边的权值(
dist[v] - dist[fa[v]])。 - 数据范围:
- \(n, m \leq 3 \times 10^5\),需使用高效输入输出(快读快写)。
卡常方法
/*
程序执行流程概述(核心逻辑:二分答案 + 树上差分 + LCA):
1. 输入处理:读取树的节点数、路径数,构建邻接表。
2. 预处理阶段:
a. 第一次DFS(dfs):计算节点深度、父节点(倍增基础),并将边权"下沉"到子节点(用子节点唯一标识边)。
b. 构建倍增表(f数组):预处理每个节点的2^j级祖先,用于快速查询LCA。
c. 第二次DFS(dfs_dist):计算根节点到所有节点的距离(distRoot数组),用于快速计算路径长度。
3. 预计算路径信息:读取每条路径的起点/终点,计算其LCA和原始长度(pathLen数组),记录最大路径长度(用于二分边界)。
4. 二分答案:通过二分法寻找**最小的最大路径长度T**,使得存在一条边置零后,所有路径长度≤T。
a. 可行性检查(check函数):
i. 统计超限路径(长度> T的路径)。
ii. 用树上差分标记这些路径覆盖的边。
iii. 汇总差分数组,得到每条边的覆盖次数。
iv. 检查是否存在边被所有超限路径覆盖,且边权足够大(置零后可使最大超限路径≤T)。
5. 输出结果:输出最小的T。
*/
/*
关于卡常:
#1 头文件
#2 for int -> for register int
#3 void -> inline void
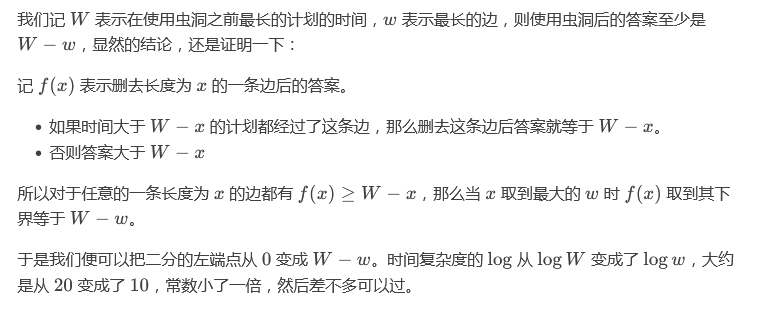
#4 [!Important] 改二分逻辑(左边界)。见 https://images.cnblogs.com/cnblogs_com/blogs/838391/galleries/2441761/o_250722010513_1.png
*/
#include "bits/stdc++.h" //卡常#1
using namespace std;
const int N = 3e5 + 10; // 最大节点数(适配题目3e5的数据范围)
const int L = 20; // 倍增深度(2^20=1e6,足够覆盖3e5节点的深度)
// 全局变量定义(按功能分类)
// 1. LCA与树结构
int f[N][L]; // 倍增数组:f[i][j]表示i的2^j级祖先
int pre[N]; // 邻接表头指针:pre[i]指向i的第一条边
int lg[N]; // 预处理log2值:lg[i] = floor(log2(i)),用于快速计算倍增层级
int n, k, q; // n:节点数;k:边计数;q:路径数
int dep[N]; // 节点深度:dep[i]表示i的深度(根节点1的深度为1)
// 2. 路径与差分
int st[N], ed[N]; // 路径的起点/终点:st[i]是第i条路径的起点,ed[i]是终点
long long pathLen[N];// 路径原始长度:pathLen[i]是第i条路径的长度(未置零任何边)
int pathLCA[N]; // 路径的LCA:pathLCA[i]是第i条路径的起点与终点的LCA
int mark[N]; // 差分数组:用于标记路径覆盖的边,汇总后表示边的覆盖次数
// 3. 边权与距离
int base[N]; // 边权下沉数组:base[i]表示i到父节点的边的权值(根节点1无父边,base[1]无意义)
long long distRoot[N];// 根到节点的距离:distRoot[i]是根节点1到i的距离
// 快读快写模板
namespace FastIO {
char buf[1 << 20], *p1 = buf, *p2 = buf;
inline char gc() {
if (p1 == p2) p2 = (p1 = buf) + fread(buf, 1, 1 << 20, stdin);
return p1 == p2 ? EOF : *p1++;
}
template<typename T>
inline void read(T &x) {
x = 0;
bool neg = 0;
char ch = gc();
while (!isdigit(ch)) neg |= (ch == '-'), ch = gc();
while (isdigit(ch)) x = (x << 3) + (x << 1) + (ch ^ 48), ch = gc();
if (neg) x = -x;
}
inline void read(char *s) {
char ch = gc();
while (isspace(ch)) ch = gc();
while (!isspace(ch)) *s++ = ch, ch = gc();
*s = '\0';
}
char pbuf[1 << 20], *pp = pbuf;
inline void push(const char &c) {
if (pp - pbuf == (1 << 20)) fwrite(pbuf, 1, 1 << 20, stdout), pp = pbuf;
*pp++ = c;
}
template<typename T>
inline void write(T x) {
static int sta[40], top = 0;
if (x < 0) push('-'), x = -x;
do {
sta[top++] = x % 10;
} while (x /= 10);
while (top) push(sta[--top] + '0');
}
inline void flush() {
fwrite(pbuf, 1, pp - pbuf, stdout);
pp = pbuf;
}
} using namespace FastIO;
// 邻接表节点结构体(存储边信息)
struct Node {
int to; // 边的目标节点
int nxt; // 下一条边的索引(链式存储)
int cost; // 边的权值
} a[N * 2]; // 邻接表数组(无向树,每条边存两次,大小为2*N)
// 添加边到邻接表(无向边,所以添加两次)
// 参数:u(起点)、v(终点)、t(权值)
inline void add(int u, int v, int t) {
a[++k] = {v, pre[u], t}; // 创建新边:目标v,下一条边是pre[u],权值t
pre[u] = k; // 更新u的邻接表头指针为当前边的索引
}
// 第一次DFS(建树):计算深度、父节点(f[i][0])、边权下沉(base数组)
// 参数:x(当前节点)、fa(当前节点的父节点)
inline void dfs(int x, int fa) {
dep[x] = dep[fa] + 1; // 当前节点深度=父节点深度+1(根节点1的父节点是0,dep[0]=0,所以dep[1]=1)
f[x][0] = fa; // 当前节点的直接父节点(2^0级祖先)是fa
// 遍历x的所有邻接边(邻接表链式存储)
for (register int i = pre[x]; i; i = a[i].nxt) {
int to = a[i].to; // 边的目标节点
if (to == fa) continue; // 跳过父节点(避免循环)
base[to] = a[i].cost; // 边权下沉:将边(x→to)的权值存到子节点to中(用to唯一标识这条边)
dfs(to, x); // 递归处理子节点to,父节点是x
}
}
// 第二次DFS(计算距离):计算根节点1到所有节点的距离(distRoot数组)
// 参数:x(当前节点)、fa(当前节点的父节点)
inline void dfs_dist(int x, int fa) {
// 遍历x的所有邻接边
for (register int i = pre[x]; i; i = a[i].nxt) {
int to = a[i].to; // 边的目标节点
if (to == fa) continue; // 跳过父节点(避免循环)
// 子节点to的距离=父节点x的距离 + 边(x→to)的权值(base[to])
distRoot[to] = distRoot[x] + base[to];
dfs_dist(to, x); // 递归处理子节点to,父节点是x
}
}
// 倍增法查询LCA(最近公共祖先):快速找到u和v的最近公共祖先
// 参数:u、v(要查询的两个节点)
// 返回值:u和v的LCA
int lca(int u, int v) {
// 步骤1:调整u和v的深度,使u的深度≥v的深度(如果u比v浅,交换两者)
if (dep[u] < dep[v]) swap(u, v);
// 步骤2:将u提升到与v同一深度(用倍增法快速提升)
int depth_diff = dep[u] - dep[v]; // u和v的深度差
for (register int i = lg[depth_diff]; i >= 0; i--) { // 从最大的2^i开始尝试
if (dep[f[u][i]] >= dep[v]) { // 如果u的2^i级祖先的深度≥v的深度,就提升u
u = f[u][i];
}
}
// 步骤3:如果提升后的u等于v,说明v是u的祖先,直接返回v
if (u == v) return u;
// 步骤4:同步提升u和v,直到它们的祖先相同(此时祖先就是LCA)
for (register int i = L - 1; i >= 0; i--) { // 从最大的2^i开始尝试
if (f[u][i] != f[v][i]) { // 如果u和v的2^i级祖先不同,就提升它们
u = f[u][i];
v = f[v][i];
}
}
// 步骤5:u和v的直接父节点(2^0级祖先)就是它们的LCA
return f[u][0];
}
// 差分汇总DFS:自底向上累加差分数组mark,得到每条边的覆盖次数
// 参数:x(当前节点)、fa(当前节点的父节点)
// 说明:mark[x]表示边(fa[x]→x)被覆盖的次数(因为边权下沉到x)
inline void dfs_sum(int x, int fa) {
// 遍历x的所有邻接边
for (register int i = pre[x]; i; i = a[i].nxt) {
int to = a[i].to; // 边的目标节点
if (to == fa) continue; // 跳过父节点(避免循环)
dfs_sum(to, x); // 先递归处理子节点to(自底向上)
mark[x] += mark[to];// 将子节点to的mark值累加到x的mark值(边(to的父节点→to)的覆盖次数是mark[to],而to的父节点是x)
}
}
// 可行性检查函数:判断是否存在一条边,置零后所有路径长度≤mid
// 参数:mid(当前要检查的最大路径长度上限)
// 返回值:true(存在这样的边)/ false(不存在)
bool check(long long mid) {
memset(mark, 0, sizeof(mark)); // 重置差分数组(每次检查都要重新标记)
int cnt_over = 0; // 超限路径计数:长度>mid的路径数量
long long max_l = 0; // 最大超限路径长度:用于计算需要减少的长度
// 步骤1:标记所有超限路径(长度>mid的路径)
for (register int i = 1; i <= q; i++) {
if (pathLen[i] > mid) { // 如果第i条路径的长度超过mid
cnt_over++; // 超限路径数量+1
max_l = max(max_l, pathLen[i]); // 更新最大超限路径长度
// 树上差分标记:路径(st[i]→ed[i])的起点、终点+1,LCA-2
// 原理:路径u-v的覆盖边是u到LCA和v到LCA的边(除了LCA本身),通过差分标记,汇总后mark[x]表示边(fa[x]→x)的覆盖次数
mark[st[i]]++; // 起点st[i]的mark值+1
mark[ed[i]]++; // 终点ed[i]的mark值+1
mark[pathLCA[i]] -= 2; // LCA的mark值-2(修正重复计数)
}
}
// 步骤2:判断是否有超限路径(没有的话,mid可行)
if (cnt_over == 0) {
return true;
}
// 步骤3:汇总差分数组,得到每条边的覆盖次数
dfs_sum(1, 0); // 从根节点1开始,自底向上汇总mark数组
// 步骤4:检查是否存在符合条件的边
// 遍历所有节点(从2开始,因为根节点1没有父边)
for (register int i = 2; i <= n; i++) {
// 条件1:边(fa[i]→i)被所有超限路径覆盖(mark[i] == cnt_over)
// 条件2:边的权值足够大(base[i] >= max_l - mid)
// 解释:max_l是最大超限路径长度,需要将其减少到<=mid,所以需要减少的长度是max_l - mid。如果边的权值≥这个值,置零该边后,max_l会减少base[i],从而≤mid。
if (mark[i] == cnt_over && base[i] >= max_l - mid) {
return true; // 存在这样的边,mid可行
}
}
// 没有找到符合条件的边,mid不可行
return false;
}
// 主函数(程序入口)
int main() {
long long max_edge = 0; // 最长边
// 步骤1:输入处理
read(n); // 读取节点数n
// 预处理lg数组(log2值):lg[i] = floor(log2(i))
// 例如:lg[1] = 0,lg[2] = 1,lg[3] = 1,lg[4] = 2,依此类推
for (register int i = 2; i <= n; i++) {
lg[i] = lg[i >> 1] + 1; // i >> 1等价于i/2(整数除法)
}
read(q); // 读取路径数q
// 读取树的边信息,构建邻接表
for (register int i = 1; i < n; i++) { // 树有n-1条边
int x, y, t;
read(x); // 读取边的节点x
read(y); // 读取边的节点y
read(t); // 读取边的权值t
max_edge = max(max_edge, 1ll * t); // 更新最长边
add(x, y, t); // 添加边x→y(权值t)
add(y, x, t); // 添加边y→x(权值t,无向树)
}
// 步骤2:预处理阶段
dep[0] = 0; // 虚拟根节点0的深度为0(根节点1的父节点是0)
dfs(1, 0); // 第一次DFS:建树,处理深度、父节点、边权下沉
// 构建倍增表f[i][j]:f[i][j] = f[f[i][j-1]][j-1](i的2^j级祖先等于i的2^(j-1)级祖先的2^(j-1)级祖先)
for (register int i = 1; i < L; i++) { // 遍历倍增的层级(从1到L-1)
for (register int j = 1; j <= n; j++) { // 遍历所有节点
f[j][i] = f[f[j][i - 1]][i - 1]; // 计算j的2^i级祖先
}
}
distRoot[1] = 0; // 根节点1到自身的距离为0
dfs_dist(1, 0); // 第二次DFS:计算根到每个节点的距离
// 步骤3:预计算路径信息
long long max_len = 0; // 所有路径中的最大长度(用于设置二分的右边界)
for (register int i = 1; i <= q; i++) {
read(st[i]); // 读取第i条路径的起点st[i]
read(ed[i]); // 读取第i条路径的终点ed[i]
pathLCA[i] = lca(st[i], ed[i]); // 计算第i条路径的LCA
// 计算第i条路径的长度:distRoot[st[i]] + distRoot[ed[i]] - 2 * distRoot[pathLCA[i]]
// 原理:路径st[i]-ed[i]的长度等于st[i]到根的距离加上ed[i]到根的距离,减去两倍的LCA到根的距离(LCA到根的距离被计算了两次)
pathLen[i] = distRoot[st[i]] + distRoot[ed[i]] - 2 * distRoot[pathLCA[i]];
max_len = max(max_len, pathLen[i]); // 更新最大路径长度
}
// 步骤4:二分答案(寻找最小的T)
long long l = max_len - max_edge; // 二分左边界(最小可能的T),详见 https://images.cnblogs.com/cnblogs_com/blogs/838391/galleries/2441761/o_250722010513_1.png
long long r = max_len; // 二分右边界(最大可能的T,即未置零任何边时的最大路径长度)
while (l <= r) { // 当左边界小于右边界时继续循环
long long mid = (l + r) >> 1; // 取中点(等价于(l + r)/2,位运算更快)
if (check(mid)) { // 如果mid可行(存在边置零后所有路径≤mid)
r = mid - 1; // 缩小右边界,尝试寻找更小的T
} else { // 如果mid不可行(不存在这样的边)
l = mid + 1; // 扩大左边界,寻找更大的T
}
}
// 步骤5:输出结果(此时l == r,是最小的T)
write(l); // 输出最小的最大路径长度
flush();
return 0; // 程序结束
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号