OpenFOAM 编程 | 求解捕食者与被捕食者模型(predator-prey model)问题(ODEs)
0. 写在前面
本文问题参考自文献 \(^{[1]}\) 第一章例 6,并假设了一些条件,基于 OpenFOAM-v2206 编写程序数值上求解该问题。笔者之前也写过基于 OpenFOAM 求解偏分方程的帖子,OpenFOAM 编程 | One-Dimensional Transient Heat Conduction。
1. 问题描述
假设一群山猫(捕食者)和一群山兔(被捕食者)生活在同一片区域,那么我们可以知道,山猫吃了山兔,繁殖力会增强,山猫的数量会增加。这样一来,山兔的数量会随之减少。接下来,山猫由于食物短缺而数量减少,进而导致山兔遇到山猫的机会减少(被吃掉的概率降低),结果山兔的数量又逐渐增加,这样山猫得到食物的机会也随之增加,其数量又再一次增加,而山兔的数量又会再一次随之减少,如此不断循环。
2. 解析求解
设任意 \(t\) 时刻山兔与山猫的数量分别是 \(\phi\) 和 \(\psi\) ,二者的变化服从下面动力学方程
其中,\(k_1\),\(k_2\),\(\mu\) 和 \(\nu\) 都是正常数。
在上述方程中有几点需要注意:
- \(k_1\phi\) 表示山兔种群的净增长率,与山兔种群数量成正比。
- \(-\mu\phi\psi\) 表示山兔被山猫吃掉而导致的减少率,与乘积 \(\phi\psi\) (可表示两种动物的相遇概率)成正比。
- \(\nu\phi\psi\) 表示山猫种群的增长率,由于其数量增长取决于捕食(相遇才有可能),因此 \(\nu\) 为正值。
- \(-k_2\psi\) 表示山猫种群的死亡率,与其种群数量成正比。
方程组(1)因为含有乘积项,因此是非线性的。现采用线性化的特殊方法求解,即研究种群数量 \(\phi\) 和 \(\psi\) 在其稳定值附近的微小涨落。设方程组(1)的稳态解为 \(\phi=\phi_0\),\(\psi=\psi_0\),它们由下面条件决定
也就是
代数方程(2)的解为
现在,将方程组(1)的解写为下面形式
其中,\(\xi\) 和 \(\eta\) 与 \(\phi_0\) 和 \(\psi_0\) 相比都是小量。将上述解带入方程组(1)中可以得到关于变量 \(\xi\) 和 \(\eta\) 的方程组
其中非线性项 \(\mu\xi\eta\) 和 \(\nu\xi\eta\) 为二阶小量,可以忽略;再将稳态解代入可得线性化的耦合方程组
解耦后可得到
可以知道,式(4)与 L-C 震荡电路及单摆问题同属于相同的数学模型
其通解为
其中,\(E\) 和 \(\delta\) 为振幅和初相位,与具体问题有关。
那么我们也可以得到本问题的最终解的形式为
其中,每个公式中振幅与初相位取决于各自的初始条件。
3. 数值求解
从上一节可知,我们需要数值求解一个耦合的常微分方程组,可以用RungeKutta法\(^{[2]}\)。简单推导过程如下:
其中,
四阶Runge-Kutta方法可以表示为:
其中,
求解代码采用 Python 编写,如下所示
#!/usr/bin/python3
# -*- coding:utf-8 -*-
import numpy as np
k1 = 0.7
k2 = 0.5
mu = 0.1
nu = 0.02
def f1(phi,psi):
return k1*phi-mu*phi*psi
def f2(phi,psi):
return nu*phi*psi-k2*psi
tStart = 0
tEnd = 100.0
n = 100000
deltaT = tEnd / n
halfDeltaT = deltaT / 2.0
Solution = np.ndarray([n+1,2])
Solution[0] = [30,20]
for i in range(n):
f11 = f1(Solution[i][0], Solution[i][1])
f21 = f2(Solution[i][0], Solution[i][1])
f12 = f1(Solution[i][0] + halfDeltaT * f11, Solution[i][1] + halfDeltaT * f21)
f22 = f2(Solution[i][0] + halfDeltaT * f11, Solution[i][1] + halfDeltaT * f21)
f13 = f1(Solution[i][0] + halfDeltaT * f12, Solution[i][1] + halfDeltaT * f22)
f23 = f2(Solution[i][0] + halfDeltaT * f12, Solution[i][1] + halfDeltaT * f22)
f14 = f1(Solution[i][0] + deltaT * f13, Solution[i][1] + deltaT * f23)
f24 = f2(Solution[i][0] + deltaT * f13, Solution[i][1] + deltaT * f23)
Solution[i+1][0] = Solution[i][0] + deltaT / 6.0 * (f11 + 2*f12 + 2*f13 + f14)
Solution[i+1][1] = Solution[i][1] + deltaT / 6.0 * (f21 + 2*f22 + 2*f23 + f24)
print((i+1)*deltaT,Solution[i+1][0],Solution[i+1][1])
4. OpenFOAM 求解
使用OpenFOAM 数值求解常微分方程(组)主要用到 ODESystem.H(构造微分方程系统)和 ODESolver.H(求解器);此外,在 OpenFOAM 中需要对常微分方程(组)进行整理\(^{[3]}\),进而方便编写代码进行求解。
对于任意阶常微分方程可以转化为一系列一阶常微分方程,这个过程称为降阶,一阶常微分方程的个数与原方程的阶数相等(对于耦合常微分方程组,其阶数等于所有方程阶数之和)。对于某个 \(n\) 阶常微分方程,可按下面形式降阶
其中,\(n\) 为阶数,\(y^{(0)}=y\) 。
进一步,引入符号 \(\mathrm{D}\) 对各阶导数重新定义,此过程称为转换
最终,使用新符号重新表达原系统,此过程称为诱导
在 OpenFOAM 中,存在另外一个过程,该过程仅与刚性系统求解器相关,这类求解器需要雅可比矩阵和对自变量的偏导数,即
接下来,我们看一下如何实现相关求解代码。首先看一下如何构造方程系统。系统代码需要继承 Foam::ODESystem 抽象类,并且需要全部实现三个方法nEqns()、 derivatives() 和 jacobian(),其中 jacobian() 方法对于非刚性求解器可以将实现置空(空函数体)。
让我们重新回顾一下公式(1),可知 nEqns() 应该返回 2;此外, 定义 \(Y=[\phi,\psi]^{\mathrm{T}}\) ,公式(1)可整理成如下向量形式
因此,导数可按照公式(1)编写即可,只不过需要注意是向量形式。最后,对应之前的描述的降阶过程,可以知道
进而可以知道, \(D_1 = Y, D'_1=Y'\),可得到雅可比矩阵和对自变量的偏导数分别为
需要注意的是,雅可比矩阵只有一个元素 \(\frac{\partial \mathrm{D}'_1}{\partial \mathrm{D}_1}\),只不过这个元素是一个块的形式。
具体代码实现如下所示
#include "ODESystem.H"
class ODEs : public Foam::ODESystem
{
public:
ODEs() {}
~ODEs() {}
// 初始化参数
ODEs(const Foam::scalar k1, const Foam::scalar mu, const Foam::scalar k2,
const Foam::scalar nu)
{
k1_ = k1;
mu_ = mu;
k2_ = k2;
nu_ = nu;
}
// 方程个数
Foam::label nEqns() const override { return 2; }
// 求导
void derivatives(const Foam::scalar x, const Foam::scalarField& y,
Foam::scalarField& dydx) const override
{ // 两个未知量存成向量,y[0] -> \phi, y[1] -> \psi
dydx[0] = k1_ * y[0] - mu_ * y[0] * y[1];
dydx[1] = nu_ * y[0] * y[1] - k2_ * y[1];
}
// 计算符号的雅可比矩阵和关于自变量的导数
void jacobian(const Foam::scalar x, const Foam::scalarField& y, Foam::scalarField& dfdx,
Foam::scalarSquareMatrix& dfdy) const override
{
dfdx[0] = 0;
dfdx[1] = 0;
dfdy[0][0] = k1_;
dfdy[0][1] = -mu_ * y[0];
dfdy[1][0] = nu_ * y[1];
dfdy[1][1] = -k2_;
}
private:
Foam::scalar k1_;
Foam::scalar mu_;
Foam::scalar k2_;
Foam::scalar nu_;
};
对应的,我们实现下主函数
#include <iostream>
#include <memory>
#include "ODESystem.H"
#include "ODESolver.H"
class ODEs : public Foam::ODESystem
{
// 这里的代码在上边已经介绍,此处省略
};
int main(int argc, char* argv[])
{
const Foam::scalar startTime = 0.0; // 开始时间
const Foam::scalar endTime = 100.0; // 结束时间
const Foam::scalar phi0 = 30; // 山兔初始值
const Foam::scalar psi0 = 20; // 山猫初始值
const Foam::label n = 100000; //
const Foam::scalar deltaT = endTime / n; // 步长
// 系数,参考自文献[4]
const Foam::scalar k1 = 0.7;
const Foam::scalar mu = 0.1;
const Foam::scalar k2 = 0.5;
const Foam::scalar nu = 0.02;
// 构造对象
ODEs odes(k1, mu, k2, nu);
// 构造求解器,具体使用的算法通过参数传递
Foam::dictionary dict;
dict.add("solver", argv[1]);
Foam::autoPtr<Foam::ODESolver> solver = Foam::ODESolver::New(odes, dict);
// 初始化一些变量
Foam::scalar tStart = startTime;
Foam::scalarField PhiPsi(odes.nEqns()); // 因变量
PhiPsi[0] = phi0;
PhiPsi[1] = psi0;
Foam::scalarField ddt(odes.nEqns()); // 保存导数值
// 计算过程
for (Foam::label i = 0; i < n; ++i)
{
Foam::scalar dtEst = deltaT / 2;
Foam::scalar tEnd = tStart + deltaT;
//
odes.derivatives(tStart, PhiPsi, ddt);
solver->solve(tStart, tEnd, PhiPsi, dtEst);
//
tStart = tEnd;
//
Foam::Info << tStart << "," << PhiPsi[0] << "," << PhiPsi[1] << Foam::endl;
}
return 0;
}
此外,CMakeLists.txt 文件可参考笔者之前的随笔,如 OpenFOAM编程 | Hello OpenFOAM 和 OpenFOAM 编程 | One-Dimensional Transient Heat Conduction,此处不再赘述。
5. 数据分析
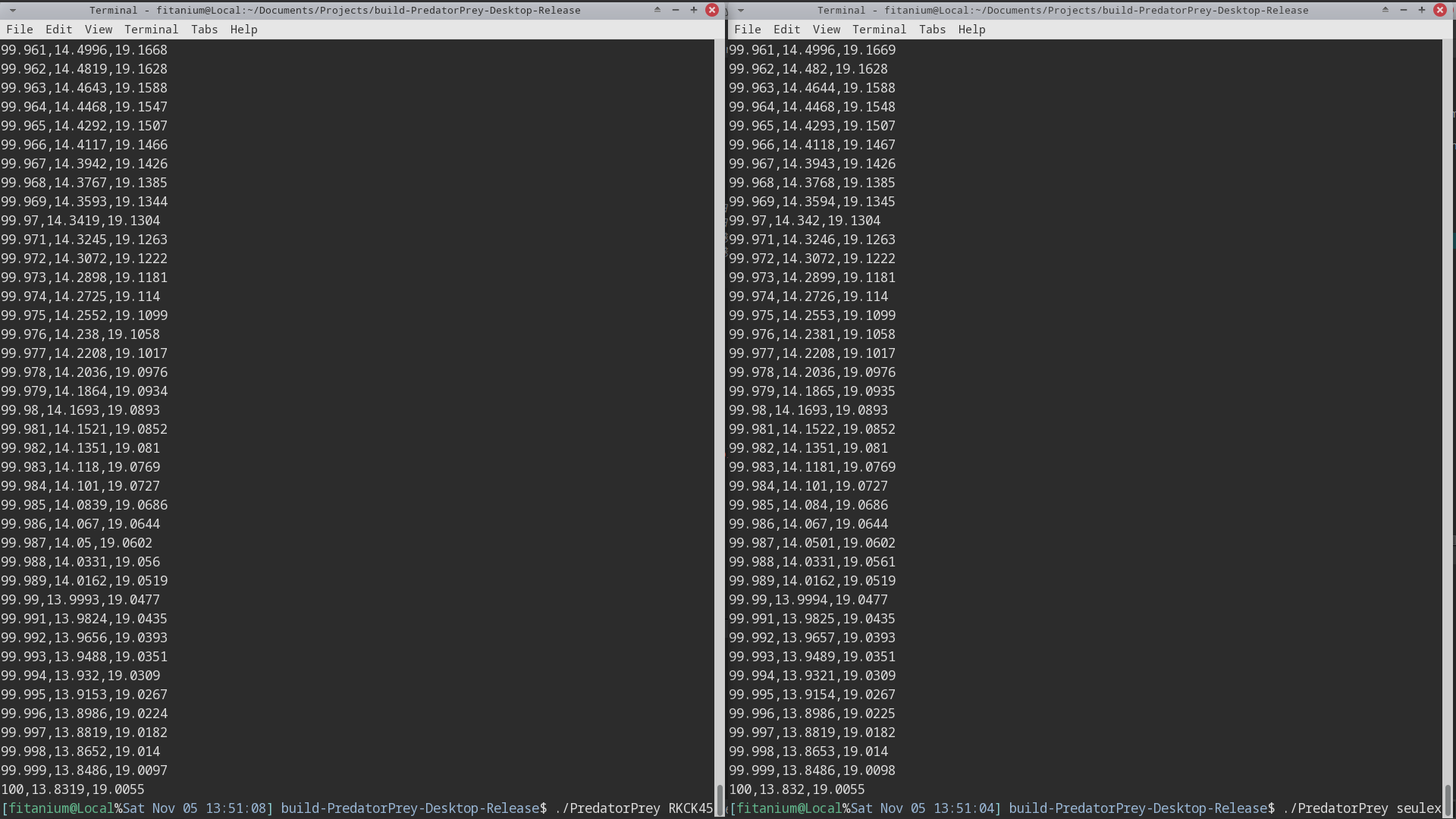
笔者通过命令行参数分别采用RKCK45 算法和 seulex 算法(需要用到雅可比矩阵)对该问题进行求解,从下图可见二者求解得到的结果是一致的。
同时运行笔者之前提到的 Python 代码后得到的数值结果与 OpenFOAM 计算结果绘制在同一张图中,二者高度重合。
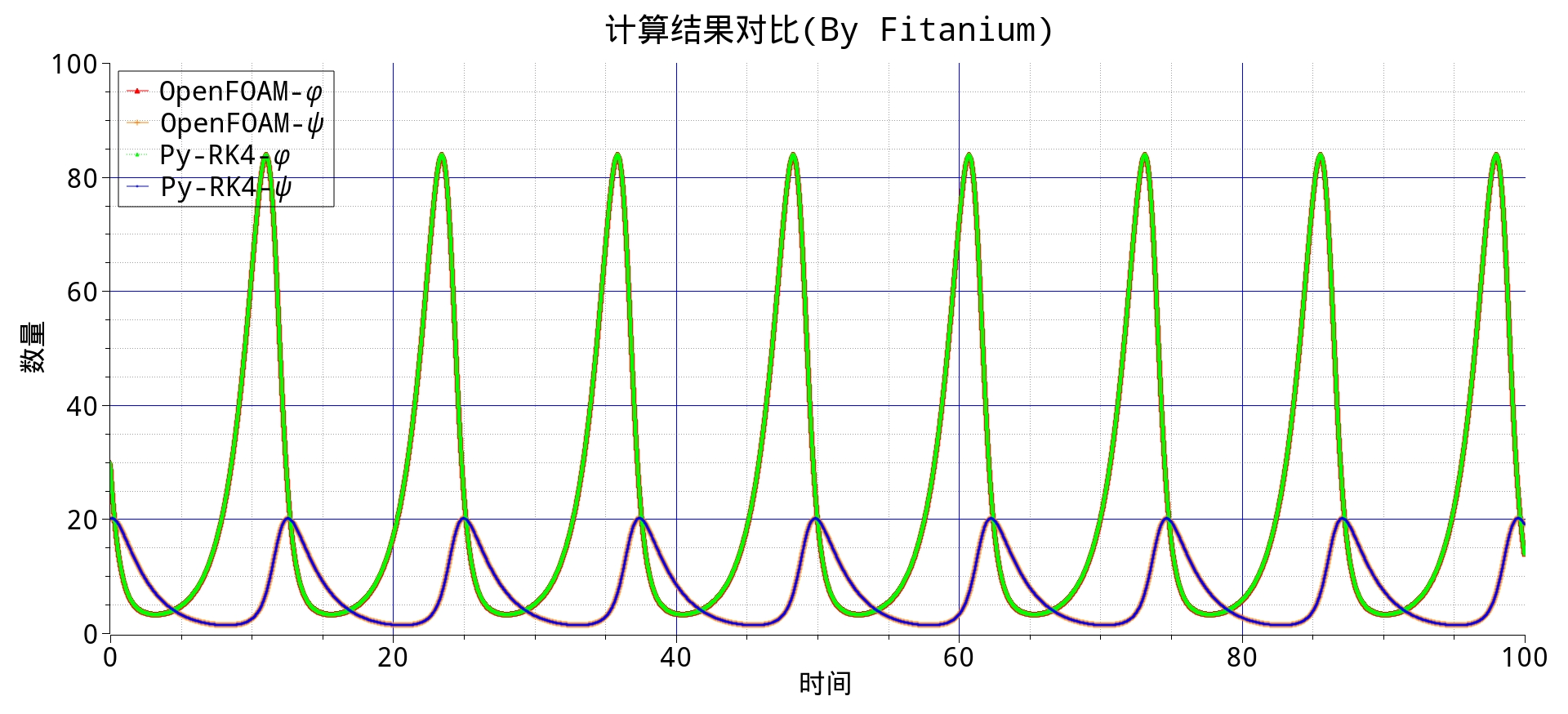
同时,解析解法(线性化的特殊解法)得到的结论是二者均按照 \(\sqrt{k_1k_2}\) 圆频率震荡,那么对应的周期为 $T = 2\pi / \sqrt{k_1k_2} = 2 \pi / \sqrt{0.7*0.5} \approx 10.62 $,而数值解中得到的周期为 12.425,笔者认为在本文的条件假设下,其中的差距来自于线性解法中没有考虑非线性,但这个解法仍然具有实际意义;读者可以尝试改用绝对值较小的系数来降低其非线性程度。
另外,感兴趣的读者可以尝试使用 Matlab 或 GNU Octave 求解该问题。
参考文献
[1] 顾樵. 数学物理方法[M]. 北京:科学出版社, 2012.
[2] Chenglin LI.数值计算(四十七)RungeKutta求解常微分方程组
[3] Hassan Kassem. How to solve ODE in OpenFOAM
[4] 捕食者与被捕食者模型——logistic-volterra
防止迷路,请关注笔者博客 博客园@Fitanium。
喜欢的朋友还请点赞、收藏、转发,您的支持将是笔者创作的最大动力。
本文来自博客园,作者:Fitanium,转载请注明原文链接:https://www.cnblogs.com/Fitanium/p/16837685.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号