LibTorch | 使用神经网络求解一维稳态对流扩散方程
0. 写在前面
本文将使用基于LibTorch(PyTorch C++接口)的神经网络求解器,对一维稳态对流扩散方程进行求解,文中仅对神经网络求解器对特定问题的求解能力进行了介绍,单纯一个无监督学习问题,未涉及迁移到其他问题的适用性问题等。水平有限,如有问题还希望读者斧正。研究问题参考自教科书\(^{[1]}\)示例 8.3。
1. 问题描述
一维稳态对流扩散方程为
其中,均匀恒定速度 \(u=2.0 \mathrm{m/s}\) ,运动粘性系数 \(\Gamma = 0.03 \mathrm{m^2/s}\) ,源项 \(S\) 的形式后文将叙述。
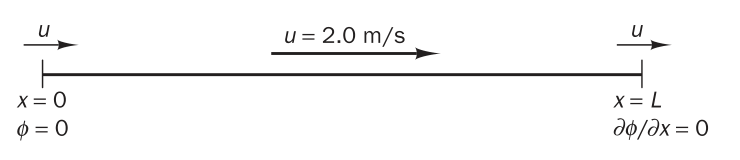
假设一维计算域长度为 \(L=1.5 \mathrm{m}\),其上分布有均匀恒定速度场;待求物理量为 \(\phi\),边界条件为左侧(\(x=0\))处给定一类边界条件(\(\phi=0\)),右侧(\(x=L\))处给定二类边界条件(\(\phi_{,x}=0\))。如下图(图片来自教科书\(^{[1]}\),图8.7)所示。
在计算域上源项分布如下图(图片来自教科书\(^{[1]}\),图8.8)所示:

其中,\(a=-200\),\(b=100\),\(x_1=0.6\),\(x_2=0.2\)。
源项数学表达式如式(1)所示。
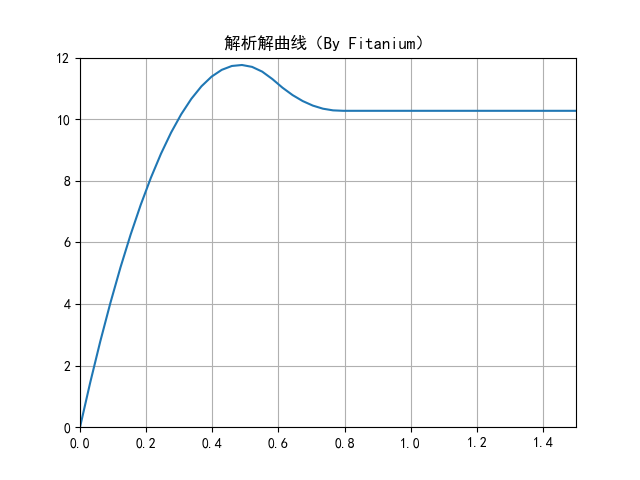
3. 解析解
上述一维稳态对流扩散方程存在解析解(参考文献中公式直接计算数值不对,这里做了一些修改,如果错了还请读者斧正):
其中,
使用下面代码绘制解析解曲线。
import math
import matplotlib.pyplot as plt
a = -200.0 # [1/m]
b = 100.0 # [1]
L = 1.5 # [m]
x_1 = 0.6 # [m]
x_2 = 0.2 # [m]
u = 2.0 # [m/s]
Gamma = 0.03 # [m^2/s]
P = u / Gamma # [1/m]
P2 = P * P # [1/m^2]
expPL = math.exp( P * L )
num_terms = 20000
def a_n(n):
if n == 0 :
return ( ( x_1 + x_2 ) * ( a * x_1 + b ) + b * x_1 ) / ( 2.0 * L )
else:
alpha = n * math.pi / L
term0 = 2.0 * L / n / n / math.pi / math.pi
term1 = ( a * ( x_1 + x_2 ) + b ) / x_2 * math.cos( alpha * x_1 )
term2 = a + ( a * x_1 + b ) / x_2 * math.cos( alpha * ( x_1 + x_2 ) )
return term0 * ( term1 - term2 )
def C2():
term0 = a_n(0) / P2 / expPL
term1 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term1 += a_n(i) / expPL * math.cos( i * math.pi ) / coeff
return term0 + term1
def C1():
term0 = C2()
term1 = a_n(0) / P2
term2 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term2 += a_n(i) / coeff
return -term0 + term1 + term2
def phi(x):
term0 = C1()
term1 = C2() * math.exp( P * x )
term2 = a_n(0) / P2 * ( P * x + 1.0 )
term3 = 0.0
for i in range(1,num_terms + 1):
alpha = i * math.pi / L
coeff = ( P2 + alpha * alpha )
term3 += a_n(i) / alpha * ( P * math.sin( alpha * x ) + alpha * math.cos( alpha * x ) ) / coeff
return term0 + term1 - term2 - term3
x = []
y = []
num_points = 50
for i in range(num_points):
x_ = L / ( num_points - 1 ) * i
x.append( x_ )
y.append( -phi(x_) * 0.75 * b / L / L ) # 这里对参考文献中的公式做了修改
plt.grid()
plt.xlim( 0, 1.5 )
plt.ylim( 0, 12 )
plt.plot( x, y )
plt.show()
图像如下所示:
4. 神经网络
上述流畅处于稳态时,物理量 \(\phi\) 是位置 \(x\) 的函数,即 \(\phi=f(x)\)。那么我们这里的想法就是利用神经网络来表示这个函数,并通过利用机器学习方法(监督学习、自动微分)使该函数满足控制方程和边界条件。
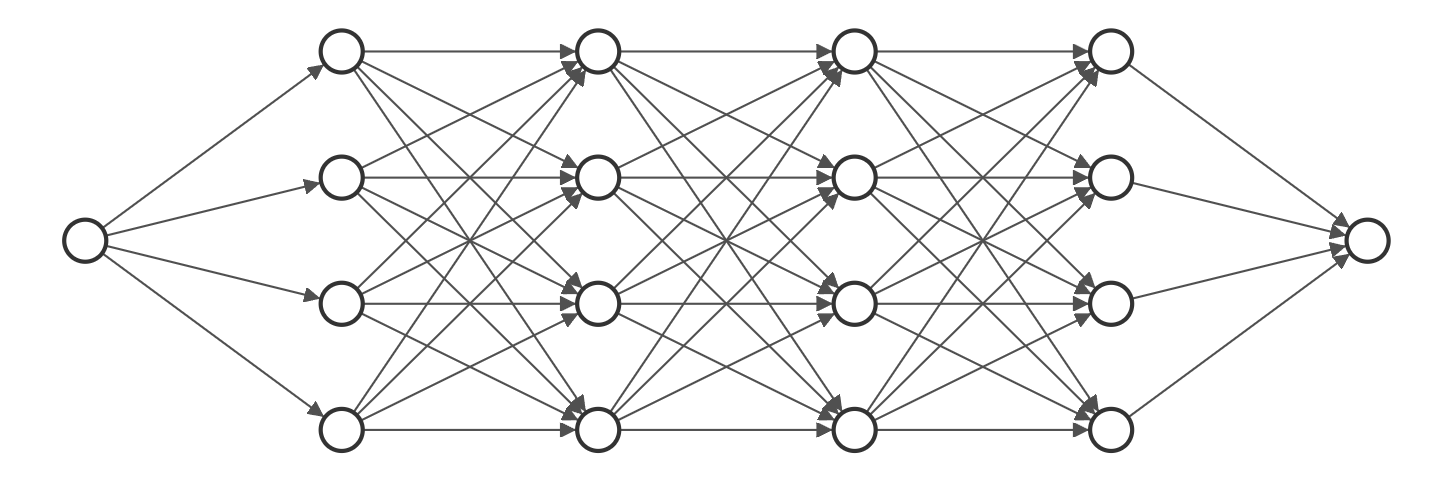
对于上述关系,我们可以涉及类似下图中这种全连接神经网络(使用NN-SVG绘制)。
4.1 网络结构
这里我们设置了一个含有6层神经元的全连接神经网络,形式如上图所示,输入层和输出层均只有一个神经元,剩余4个隐藏层每层含有256个神经元。
神经网络类的声明如下,保存在文件 nets.hpp 文件中,其中需要声明向前传播算法方法以及相关模块变量。
#ifndef NETS_HPP
#define NETS_HPP
#include <torch\torch.h>
// 神经网络类
class Net : public torch::nn::Module {
public:
Net(const int inDim, const int outDim);
torch::Tensor forward(at::Tensor x);
private:
torch::nn::Linear input{nullptr};
torch::nn::Linear hidden0{nullptr};
torch::nn::Linear hidden1{nullptr};
torch::nn::Linear hidden2{nullptr};
torch::nn::Linear output{nullptr};
};
#endif // NETS_HPP
接下来看一下神经网络的实现,我们将其实现保存在 nets.cpp 文件中,其中构造函数中将初始化这些模块变量;forward 方法为向前传播的实现,数据传播过程为 \(1\to 256\to 256\to 256\to 256\to 1\),网络接受一个标量输入并最终返回一个标量输出;另外隐藏层全部采用 tanh 函数作为激活函数。
#include "nets.hpp"
Net::Net(const int inDim, const int outDim) {
input = register_module("input", torch::nn::Linear(inDim, 256));
hidden0 = register_module("hidden0", torch::nn::Linear(256, 256));
hidden1 = register_module("hidden1", torch::nn::Linear(256, 256));
hidden2 = register_module("hidden2", torch::nn::Linear(256, 256));
output = register_module("output", torch::nn::Linear(256, outDim));
}
torch::Tensor Net::forward(at::Tensor x) {
// 输入层 : 1 --> 隐藏层 0 : 256
torch::Tensor phi = input->forward(x);
phi = torch::tanh(phi); // 激活函数
// 隐藏层 0 : 256 --> 隐藏层 1 : 256
phi = hidden0->forward(phi);
phi = torch::tanh(phi); // 激活函数
// 隐藏层 1 : 256 --> 隐藏层 2 : 256
phi = hidden1->forward(phi);
phi = torch::tanh(phi); // 激活函数
// 隐藏层 2 : 256 --> 隐藏层 3 : 256
phi = hidden2->forward(phi);
phi = torch::tanh(phi); // 激活函数
// 隐藏层 3 : 256 --> 输出层 : 1
phi = output->forward(phi);
//
return phi;
}
4.2 源项代码
分布源项为分段函数,这块比较简单,直接给出头文件和实现。
函数声明保存在 utils.hpp 文件中。
#ifndef UTILS_HPP
#define UTILS_HPP
float Source(const float x);
#endif // UTILS_HPP
函数实现保存在 utils.cpp 文件中。
#include "utils.hpp"
float Source(const float x) {
if (x < 0.6) {
return -200.0 * x + 100.0;
} else if (x > 0.8) {
return 0.0;
} else {
return 100.0 * x - 80.0;
}
}
4.3 训练代码
这里,我们将训练代码保存在 main.cpp 文件中。由于空间位置不变,我们在迭代训练外构造输入参数。
代码实现如下所示,其中计算PDE的损失时用到了自动微分,可参考笔者之前的随笔LibTorch 自动微分。
#include <fstream>
#include <iomanip>
#include <iostream>
#include <string>
#include "nets.hpp"
#include "utils.hpp"
int main(int argc, char *atgv[]) {
std::cout << std::scientific << std::setprecision(7);
const double L = 1.5; // 计算域长度
const int numElement = 20; // 输入点个数
// 构造输入,维度为[N,1],N行,每行为一个输入,维度为1
std::vector<float> x;
for (int i = 0; i < numElement; ++i) {
x.push_back(L / double(numElement - 1) * double(i));
}
torch::Tensor xT = torch::from_blob(x.data(), {numElement, 1}, torch::kFloat)
.requires_grad_(true);
// 初始化神经网络和随机梯度下降优化器
std::shared_ptr<Net> net = std::make_shared<Net>(1, 1);
std::shared_ptr<torch::optim::SGD> optimizer =
std::make_shared<torch::optim::SGD>(net->parameters(), 1.e-4);
// 开始迭代训练
double lossVal = 10;
int epochIdx = 0;
std::vector<float> sol(numElement);
while (lossVal > 1.e-3) {
// 向前传播,最终输出是一个[N,1]的输出
torch::Tensor out = net->forward(xT);
// 构造损失函数(由3部分组成,PDE和两侧边界条件)
auto ones = torch::ones_like(out);
torch::Tensor ddx =
torch::autograd::grad({out}, {xT}, {ones}, true, true, false)[0];
torch::Tensor d2dx2 =
torch::autograd::grad({ddx}, {xT}, {ones}, true, true, false)[0];
auto sourceTerm = torch::zeros_like(out);
for (int i = 0; i < numElement; ++i) {
sourceTerm[i][0] = Source(xT[i][0].item<float>());
}
auto pde = 2.0 * ddx - 0.03 * d2dx2;
auto pdeLoss = torch::mse_loss(pde, sourceTerm); // 偏微分方程
auto tag1 = torch::zeros_like(out);
for (int i = 0; i < numElement; ++i) {
if (i == 0) {
tag1[i][0] = 0.0;
} else {
tag1[i][0] = out[i][0].item<float>();
}
}
auto bndLoss1 = torch::mse_loss(out, tag1); // 左侧边界条件
auto tag2 = torch::zeros_like(ddx);
for (int i = 0; i < numElement; ++i) {
if (i == numElement - 1) {
tag2[i][0] = 0.0;
} else {
tag2[i][0] = ddx[i][0].item<float>();
}
}
auto bndLoss2 = torch::mse_loss(ddx, tag2); // 右侧边界条件
auto totalLoss = pdeLoss + bndLoss1 + bndLoss2;
// 反向传播
optimizer->zero_grad();
totalLoss.backward();
optimizer->step();
// 打印日志
lossVal = totalLoss.item<float>();
std::cout << "PDE_LOSS: " << pdeLoss.item<float>()
<< ", BND_LOSS1: " << bndLoss1.item<float>()
<< ", BND_LOSS2: " << bndLoss2.item<float>()
<< ", TOTAL_LOSS: " << lossVal << ", EPOCH.IDX: " << epochIdx
<< std::endl;
epochIdx += 1;
for (int i = 0; i < numElement; ++i) {
sol[i] = out[i][0].item<float>();
}
}
// 保存结果
std::ofstream os;
os.open("solution.txt", std::ios::out);
for (int i = 0; i < numElement; ++i) {
os << x[i] << " " << sol[i] << std::endl;
}
os.close();
return 0;
}
4.4 CMakeLists.txt
这里使用 CMake 管理程序代码,内容如下所示。
cmake_minimum_required( VERSION 3.8 )
project( LibTorch)
set( CMAKE_CXX_STANDARD 14 )
set( INSTALL_PREFIX "D:/SoftwarePackage" )
## LibTorch
find_package(Torch REQUIRED PATHS "${INSTALL_PREFIX}/libtorch/share/cmake/Torch")
link_directories( "${INSTALL_PREFIX}/libtorch/lib" )
# My own code
include_directories( . )
set(SRCS
nets.cpp
utils.cpp
)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} ${TORCH_CXX_FLAGS}" )
add_executable ( ${PROJECT_NAME} main.cpp ${SRCS} )
target_link_libraries(${PROJECT_NAME} ${TORCH_LIBRARIES} )
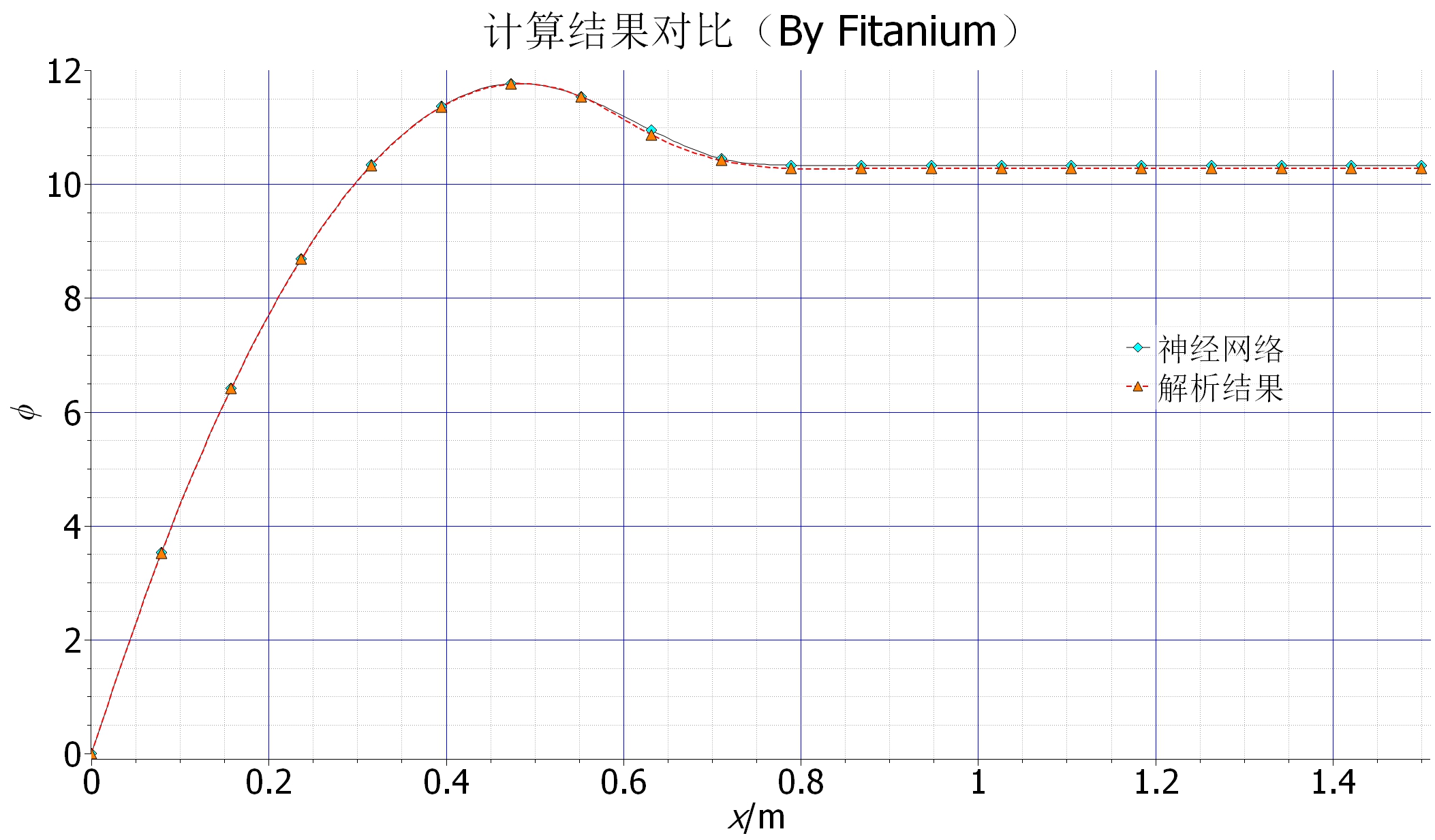
5. 结果处理
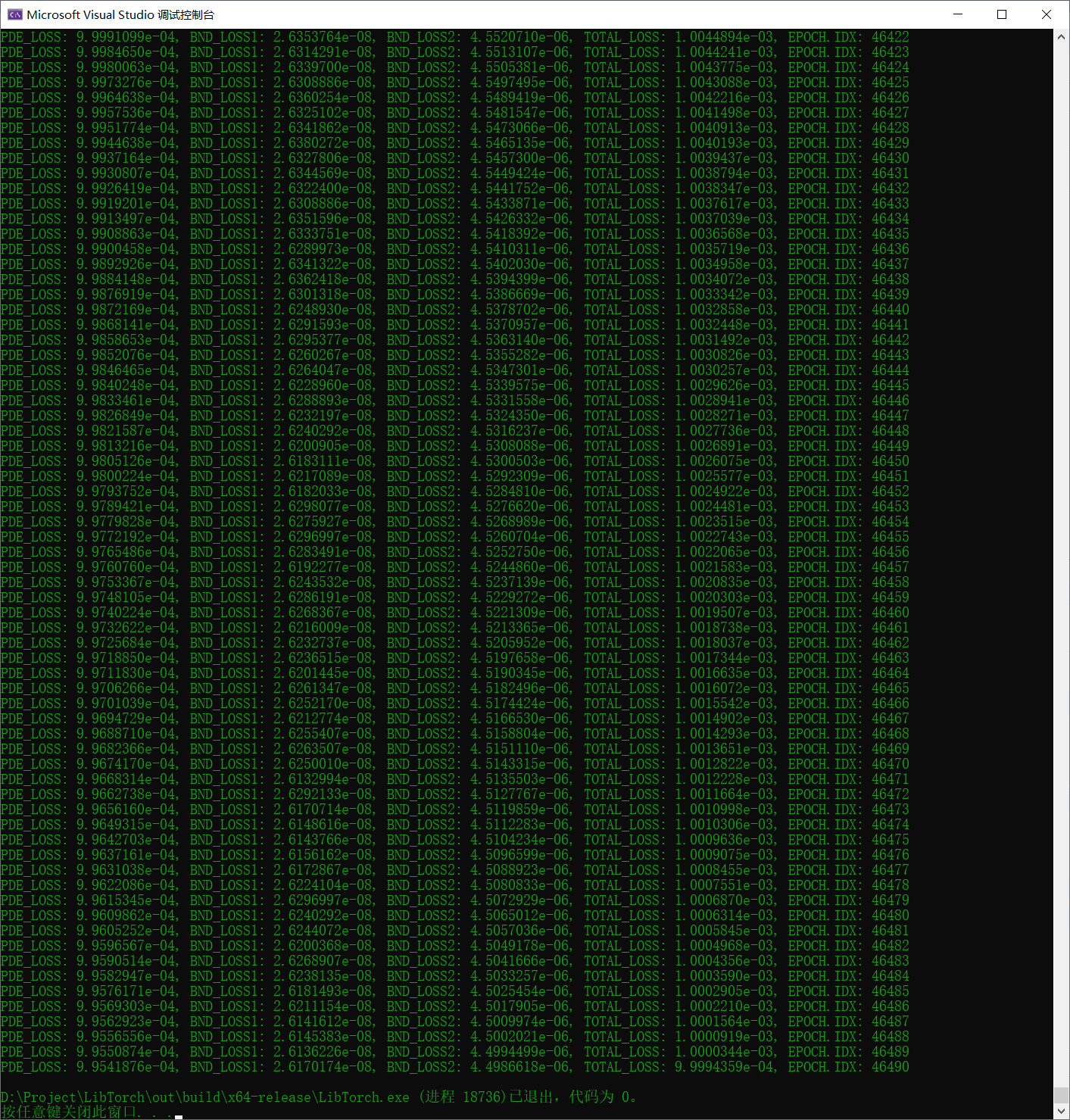
神经网络训练了近4万6千多次才满足收敛标准,其实还是挺慢的。其中误差最主要来自于神经网络无法满足偏微分方程(PDE),这和很多因素有关,比如网络结构,收敛判据等。
从下图数值结果来看,训练的神经网络给出的结果与解析解能够较好吻合,后段有一个明显的误差,但是相对较小,这个误差应该来自网络本身,网络结构简单,改进空间应该还是比较大。
本文写的比较简单,也没有使用批训练。此外,感兴趣的小伙伴可以尝试使用OpenFOAM求解,可参考笔者之前的随笔 OpenFOAM 编程 | One-Dimensional Transient Heat Conduction 。
6. 后记
发了这个随笔之后,有几个小伙伴提出了一些评论和问题(非常感谢能够提出一些东西让我思考),感觉挺不错的,我也想把自己的理解在此处记录一下,欢迎大家交流讨论:
-
训练的这个神经网络可以用来求解其他类似问题吗?
坦言之,这个随笔里的神经网络只能求解这个问题,其他问题解不了。第一点就是清楚一个模型的作用,笔者随笔里提到的模型只是假设了一个稳态解,然后用神经网络去学习这个解,因此它的作用是给定 \(x\) 坐标,输出对应的结果 \(\phi\);第二点就是,这里的神经网络不是一个通用的求解器,对于这个问题训练完成后,模型参数确定了,对于其他问题,训练同样一个神经网络,参数可能完全不一样,所以很难说适用其他问题(大概率是不能);第三点就是,如何定义“其它问题”,PDE形式、边界条件、初始条件,已知条件等的不同都会导致问题改变,即使使用有限体积法,所形成的的系数矩阵和右端项也是不一样的,而直接迁移使用对于神经网络来说有点太难了,所以结论仍然是解不了。 -
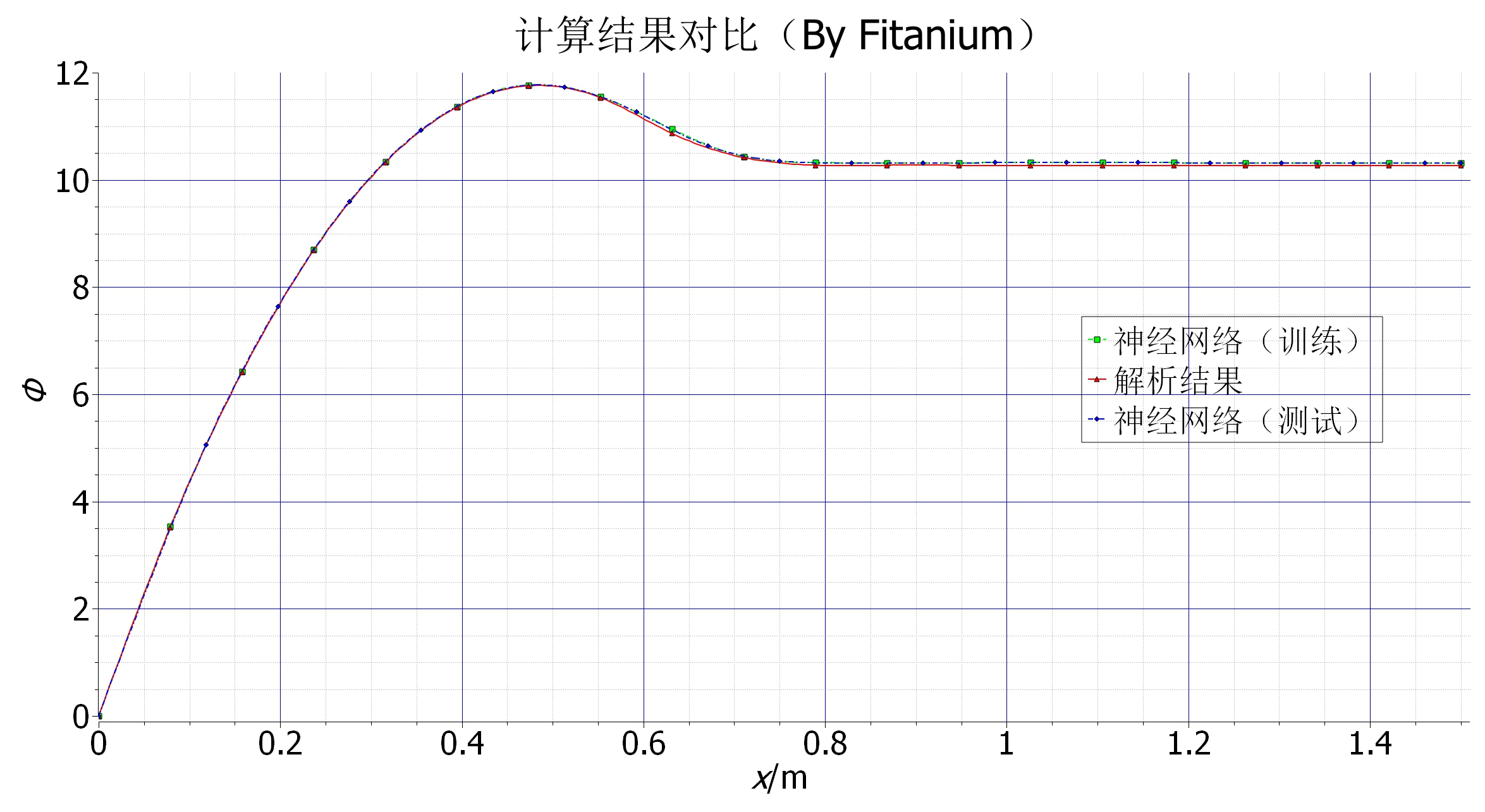
为什么没有测试集?预测能力体现在哪里?
在第一个问题中提到了,我们假定了稳态解的形式 \(\phi=f(x)\),所以坐标 \(x\) 需要作为训练数据使用;而我们并没有 \((x_i,\phi_i)\) 这样的已知数据对(笔者也没有使用解析解,不想把这个神经网络变成一个单纯的监督学习任务,虽然加入部分已知数据可以加快收敛);但是笔者的随笔里确实缺少测试过程,应该添加一些非训练点用作预测使用,笔者之后会补上。
代码修改如下
// 测试坐标点 std::vector<float> x_test; for (int i = 0; i < numElement; ++i) { if (i == 0 || i == numElement - 1) { x_test.push_back(x[i]); } else { x_test.push_back(x[i] + L / double(numElement - 1) * 0.5); // 这里训练数据做了偏移 } } torch::Tensor x_testT = torch::from_blob(x_test.data(), {numElement, 1}, torch::kFloat); // 训练结束后,获得测试结果 torch::Tensor out = net->forward(x_testT); os.open("solution_test.txt", std::ios::out); for (int i = 0; i < numElement; ++i) { os << x_test[i] << " " << out[i][0].item<float>() << std::endl; } os.close();然后,把训练结果、解析结果和测试结果绘制在同一张图里。
-
这个随笔的意义在哪里?
在于使用神经网络去得到一个变为分方程的解,侧重介绍这个无监督学习方法(自动微分、反向传播)的用法。 -
训练数据点怎么选取的?
均匀选取的,本文通过误差反向传播和自动微分求出解的形式,本文算例对坐标点没有什么要求,可能其它情况会有别的要求。 -
不会过拟合吗?
应该不会,这个问题和监督学习有挺大的区别,在于损失函数的形式,除左侧边界条件外,损失函数的其他部分(PDE和右侧边界)没有直接用到模型的输出,因此个人感觉不会过拟合。
参考文献
[1] H. Versteeg , W. Malalasekera. Introduction to Computational Fluid Dynamics, An: The Finite Volume Method 2nd Edition[M]. Pearson. 2007.
本文来自博客园,作者:Fitanium,转载请注明原文链接:https://www.cnblogs.com/Fitanium/p/16678359.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号