斜率优化(凸壳优化)和李超线段树
前言
闲话
写了好久,有些细节点理解了,但是总是写不出来,不知道怎么解释,多感性理解吧,自己多画图辅助理解。
- 其实在很多事情上,可能放弃才是正确的选择。
能想清楚就行,不必强求自己。像我一直困在一个点想来想去,花了不少时间,最后还是只能笼统地概括...
标记永久化
解释
线段树中普通的区间修改都需要懒标记,但懒标记的维护要及时更新下传,为了避免多次无意义的下传操作,就要用到标记永久化。
举个简单例子,线段树的区间加,查询区间最大值:
常见的方法就是在区间修改的时候维护一个标记,表示区间被加的值,当访问到这个区间时,标记就会被下传;
而标记永久化的区别就在于,懒标记不会下传,将会永久保留在当前节点上,那么在查询的时候,\(\text{得到的最大值 = 真实的最大值 - 当前节点的标记值}\),计算答案时只需要将当前的标记值一并算入即可。
要求
不同的修改操作是可以交换顺序的,或者对答案的贡献是独立的,不适用于像既有乘法又有加法的区间操作。
复杂度分析
由于标记不需要下传,只需要合并,每个点至多一个标记,查询时最多考虑 \(\log{n}\) 个标记,复杂度为 \(O(n\log{n})\)。
李超线段树
闲话
暑假多校训练中听到一句关于李超线段树本质的话:
- 王侯将相宁有种乎。
前置
- 线段树
- 标记永久化
引入
【模板】李超线段树 / [HEOI2013] Segment
- 加入一个一次函数,定义域为 \([l,r]\);
- 给定 \(k\),求定义域包含 \(k\) 的所有一次函数中,在 \(x = k\) 处取值最大的那个,如果有多个函数取值相同,选编号最小的。
注意:当线段垂直于 \(x\) 轴时,会出现除以零的情况。假设线段两端点分别为 \((x,y_0)\) 和 \((x,y_1)\),\(y_0 < y_1\),则插入定义域为 \([x,x]\) 的一次函数 \(f(x)=0 \cdot x+y_1\)。
我们发现,传统的线段树无法很好地维护这样的信息。这种情况下,李超线段树便应运而生。
过程
显然任意两条在区间 \([l,r]\) 上的线段之间只会有两种状态:相交或覆盖。
发现无论如何,总有一条线段在至少一个半区间上是完全优于另一条线段的;
- 定义【完全覆盖】为在一段区间 \([l,r]\) 内某条线段完全优于其他的线段。
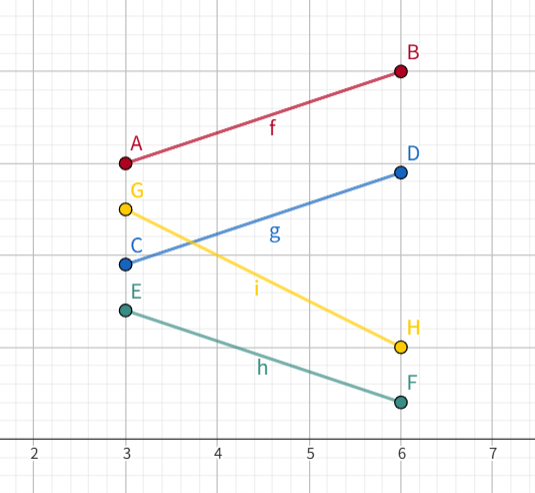
如下图:线段 \(f\) 在区间 \([3,6]\) 上完全覆盖。
那么就给了我们一个思路,尝试建立线段树去维护在 \([l,r]\) 区间上(设区间的中点为 \(m\))的所有线段中,在左区间 \([l,m]\) 或右区间 \([m+1,r]\) 中的至少一个区间上完全覆盖的线段的编号。
现在考虑加入一条新的直线对于区间 \([l,r]\) 的贡献:
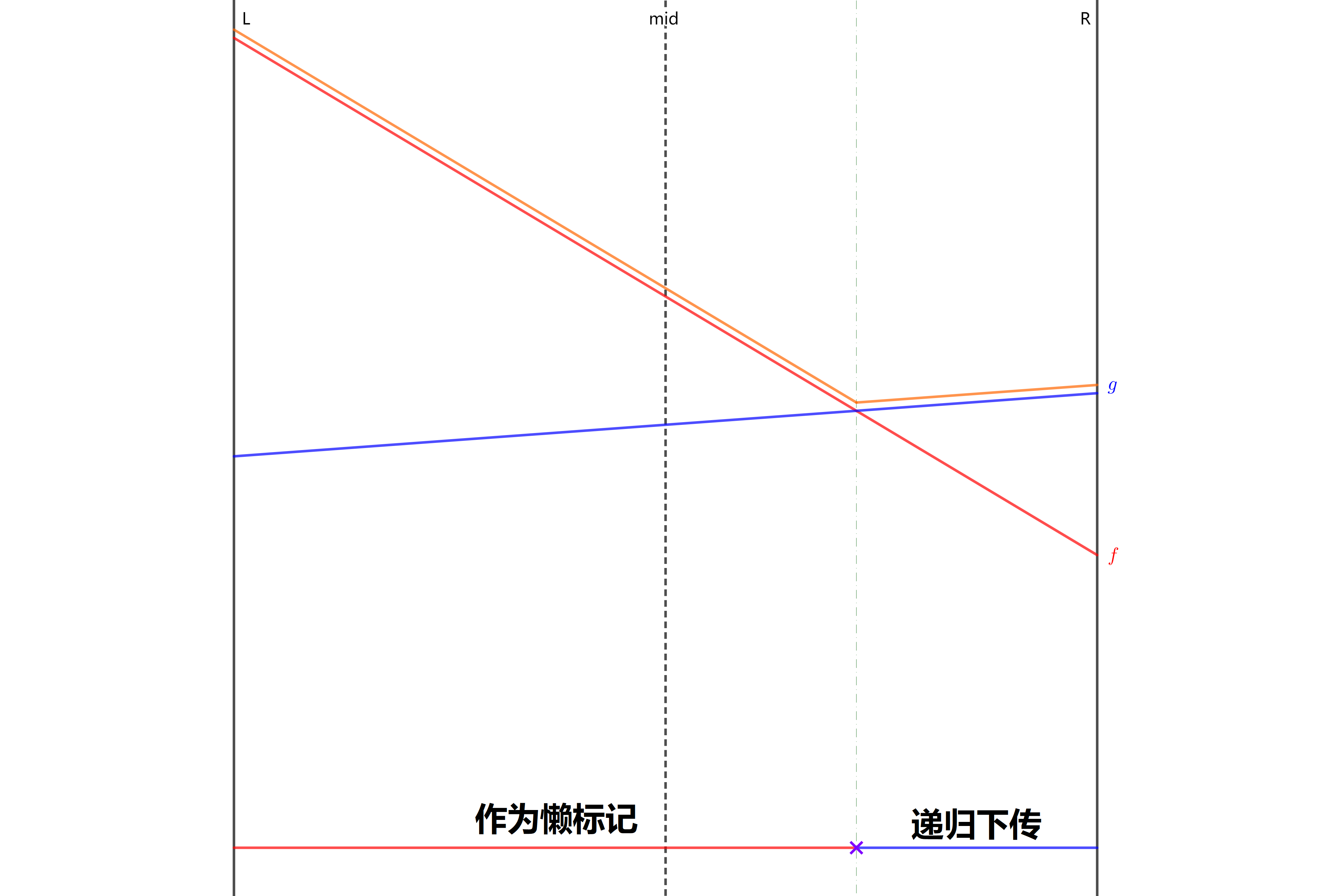
注:\(f,g\) 分别是新加入的线段和原标记最优的线段。
如图,按新线段 \(f\) 取值是否大于原标记线段 \(g\),我们可以把当前区间分为两个子区间。其中肯定有一个子区间被左区间或右区间完全包含,也就是说,在两条线段中,肯定有一条线段,只可能成为左区间的答案,或者只可能成为右区间的答案。
我们用这条线段递归更新对应子树,用另一条线段作为懒标记更新整个区间,这就保证了递归下传的复杂度。
当一条线段只可能成为左或右区间的答案时,才会被下传,所以不用担心漏掉某些线段。
如果新线段 \(f\) 更优,则将 \(f\) 和 \(g\) 交换,使线段在中点 \(x = m\) 处交换后的 \(f\) 不优于 \(g\)(下面所有的 \(f\) 和 \(g\) 都是交换过后的):
-
①. 若左端点处 \(f\) 更优,说明 \(f\) 和 \(g\) 在左半区间 \([l,m]\) 产生了交点,则递归到左儿子中下传信息;
-
②. 若右端点处 \(f\) 更优,说明 \(f\) 和 \(g\) 在右半区间 \([m + 1,r]\) 产生了交点,则递归到右儿子中下传信息;
-
③. 若左右端点处 \(g\) 都更优,说明 \(g\) 在区间 \([l,r]\) 完全覆盖 \(f\),不需要继续下传。
若 \(f\) 和 \(g\) 刚好交于中点,在实现中可以归入中点处 \(f\) 不如 \(g\) 优的情况,会往 \(f\) 更优的一个端点进行递归下传。
inline void upd(int rt,int l,int r,int x) {
int mid=(l+r)>>1;
int &y=rd[rt];
int tp=cmp(calcY(x,mid),calcY(y,mid));
if(tp==1||(!tp&&x<y))
swap(x,y);
int tl=cmp(calcY(x,l),calcY(y,l));
int tr=cmp(calcY(x,r),calcY(y,r));
if(tl==1||(!tl&&x<y))
upd(lson,l,mid,x);
if(tr==1||(!tr&&x<y))
upd(rson,mid+1,r,x);
return ;
}
最后查询的时候运用标记永久化思想,将路径上所有的标记都作比较求极值即可。
- 闲话:我在这想了好几天,卡在这,只能感性理解,没法给出严谨的证明为什么需要标记永久化,太弱了qwq
复杂度分析:
加入线段时,区间修改打懒标记要 \(O(n\log{n})\),除此之外在每个标记的点都需要递归下传最多 \(\log{n}\) 层,所以插入操作的时间复杂度为 \(O(n\log^2{n})\)。
查询时的标记永久化的使用就显得非常巧妙了(¯▽¯),复杂度为 \(O(n\log{n})\)。
总体的复杂度为 \(O(n\log^2{n})\),瓶颈在加入线段操作的 \(O(n\log^2{n})\)。
特别的,加入的是直线的话,复杂度就变为 \(O(n\log{n})\),因为每条直线只用在 \([1,N]\) 打一次懒标记。
局限性:只能支持单点查询。
Code
#include<bits/stdc++.h>
#define int long long
#define lson rt<<1
#define rson rt<<1|1
#define M(x,y) make_pair(x,y)
using namespace std;
typedef pair<double,int> pdl;
const double eps=1e-9;
const int mod1=39989;
const int mod2=1e9;
const int N=1e5+10;
int n;
struct Line {
double k,b;
} p[N];
int cnt,rd[N<<2];
inline int cmp(double x,double y) {
if(x-y>eps)
return 1;
if(y-x>eps)
return -1;
return 0;
}
inline double calcY(int id,int x) {
return p[id].b+p[id].k*x;
}
inline void add(int x0,int y0,int x1,int y1) {
++cnt;
if(x0==x1) {
p[cnt].k=0;
p[cnt].b=max(y0,y1);
} else {
p[cnt].k=1.0*(y1-y0)/(x1-x0);
p[cnt].b=y0-p[cnt].k*x0;
}
return ;
}
inline void upd(int rt,int l,int r,int x) {
int mid=(l+r)>>1;
int &y=rd[rt];
int tp=cmp(calcY(x,mid),calcY(y,mid));
if(tp==1||(!tp&&x<y))
swap(x,y);
int tl=cmp(calcY(x,l),calcY(y,l));
int tr=cmp(calcY(x,r),calcY(y,r));
if(tl==1||(!tl&&x<y))
upd(lson,l,mid,x);
if(tr==1||(!tr&&x<y))
upd(rson,mid+1,r,x);
return ;
}
inline void update(int rt,int l,int r,int s,int t,int x) {
if(s<=l&&r<=t) {
upd(rt,l,r,x);
return ;
}
int mid=(l+r)>>1;
if(s<=mid) update(lson,l,mid,s,t,x);
if(mid<t) update(rson,mid+1,r,s,t,x);
return ;
}
inline pdl pmax(pdl x,pdl y) {
if(cmp(x.first,y.first)==1)
return x;
if(cmp(x.first,y.first)==-1)
return y;
if(x.second<y.second)
return x;
return y;
}
inline pdl query(int rt,int l,int r,int x) {
if(l>x||r<x)
return M(0,0);
double res=calcY(rd[rt],x);
if(l==r)
return M(res,rd[rt]);
int mid=(l+r)>>1;
return pmax(M(res,rd[rt]),pmax(query(lson,l,mid,x),query(rson,mid+1,r,x)));
}
signed main() {
scanf("%lld",&n);
int lastans=0;
while(n--) {
int op;
scanf("%lld",&op);
if(op==1) {
int x0,y0,x1,y1;
scanf("%lld%lld%lld%lld",&x0,&y0,&x1,&y1);
x0=(x0+lastans-1+mod1)%mod1+1;
x1=(x1+lastans-1+mod1)%mod1+1;
y0=(y0+lastans-1+mod2)%mod2+1;
y1=(y1+lastans-1+mod2)%mod2+1;
if(x0>x1)
swap(x0,x1),swap(y0,y1);
add(x0,y0,x1,y1);
update(1,1,mod1,x0,x1,cnt);
} else {
int x;
scanf("%lld",&x);
x=(x+lastans-1+mod1)%mod1+1;
lastans=query(1,1,mod1,x).second;
printf("%lld\n",lastans);
}
}
return 0;
}
斜率优化/凸壳优化
引入
简要:有 \(n\) 个数,现在把其分割成若干组,每组代价的贡献是这组内所有数的和的平方加上常数 \(m\),求最小的代价。
解析
直入主题,现在有 \(O(n^2)\) 的转移式子,如下:
\(f_i = min \{ f_j + ( g_i - g_j ) ^ 2 + m \},0 < j < i\)
其中 \(f_i\) 表示前 \(i\) 个数的代价的最小值,\(g_i\) 表示前 \(i\) 个数字的和。
拿到这种复杂的转移式子,先尝试展开,看是否能套用 \(y = kx + b\) 的斜率优化 DP 的标准形式,从而优化到 \(O(n)\) 或者 \(O(nlogn)\):
\(f_i = f_j + g_i ^ 2 + g_j ^ 2 - 2g_ig_j + m\)
移项可得:
\(f_j + g_j ^ 2 = 2g_ig_j + f_i - g_i ^ 2 - m\)
对照 \(y = kx + b\),可得:
\( \begin{align*} y &= f_j + g_j ^ 2 \\ x &= 2g_j \\ k &= g_i \\ b &= f_i - g_i ^ 2 - m \end{align*} \)
(这里其实 \(x\) 也可以为 \(g_j\),则 \(k\) 为 \(2g_i\))
本转移式中:
- \(y\) 只与 \(j\) 有关;
- \(x\) 只与 \(j\) 有关,且随着 \(j\) 递增而递增;
- \(k\) 只与 \(i\) 有关,且随着 \(i\) 递增而递增;
- \(b\) 只与 \(i\) 有关,且包含 \(f_i\)。
由于 \(x,k\) 都具有单调性,可以使用单调队列维护。
单调队列
例题:[HNOI2008] 玩具装箱和[APIO2010] 特别行动队
Solution
(最近做的是【特别行动队】,比较熟悉,就那这题作例)
按道理,考虑暴力转移:
\(f_i = max \{ f_j + a( g_i - g_j ) ^ 2 + b( g_i - g_j ) + c \},0 < j < i\)
展开并移项可得:
\(f_j + ag_j ^ 2 - bg_j = 2ag_ig_j + f_i - ag_i ^ 2 - bg_i - c\)
令:
\( \begin{align*} y &= f_j + ag_j ^ 2 - bg_j \\ x &= 2ag_j \\ k &= g_i \\ b &= f_i - ag_i ^ 2 - bg_i - c \end{align*} \)
注意:本题的 \(a < 0\),后面会讲到。
发现 \(x,k\) 都是单调递增的,用单调队列。
inline int Y(int i) {
return f[i]+a*g[i]*g[i]-b*g[i];
}
inline int X(int i) {
return 2*a*g[i];
}
inline int slopeU(int i,int j) {
return Y(j)-Y(i);
}
inline int slopeD(int i,int j) {
return X(j)-X(i);
}
【凸壳】大白话来讲就是所有 \((x_i,y_i)\) 的点对中最外一层包围的点。
接下来是做题的一般性做题步骤:
Step 1
取两个决策点 \(j1\) 和 \(j2\),使得 \(j2\) 优于 \(j1\),即:
\(f_{j1} + ag_i ^ 2 + ag_{j1} ^ 2 - 2ag_ig_{j1} + bg_i - bg_{j1} + c \le f_{j2} + ag_i ^ 2 + ag_{j2} ^ 2 - 2ag_ig_{j2} + bg_i - bg_{j2} + c\)
消掉同项:
\(f_{j1} + ag_{j1} ^ 2 - 2ag_ig_{j1} - bg_{j1} \le f_{j2} + ag_{j2} ^ 2 - 2ag_ig_{j2} - bg_{j2}\)
移项:
\(2ag_i(g_{j2} - g_{j1}) \le f_{j2} + ag_{j2} ^ 2 - bg_{j2} - ( f_{j1} + ag_{j1} ^ 2 - bg_{j1} )\)
因为 \(a < 0,g_{j2} - g_{j1} < 0\),所以 \(2a(g_{j2} - g_{j1}) > 0\),不用变号:
\(g_i \le \frac{f_{j2} + ag_{j2} ^ 2 - bg_{j2} - ( f_{j1} + ag_{j1} ^ 2 - bg_{j1} )}{2ag_{j2} - 2ag_{j1}}\)
即 \(g_i \le \frac{y_{j2} - y_{j1}}{x_{j2} - x_{j1}}\)
这个就是第一个条件。
while(head+1<=tail&&slopeU(q[head],q[head+1])>=g[i]*slopeD(q[head],q[head+1]))
++head;
注意:为了避免精度问题,采用乘法。
Step 2
其实实质就是,当遍历到 \(i\) 时,斜率为 \(k = g_i\) 直线慢慢接近凸壳,直到碰到第一个点,这个点必然就是当前维护的凸壳队列上的一个点。
第二个我们需要确定其凸壳的图像,\(x = 2ag_j\) 单调递减,\(k = g_i\) 单调递增,所以大致得出图像:
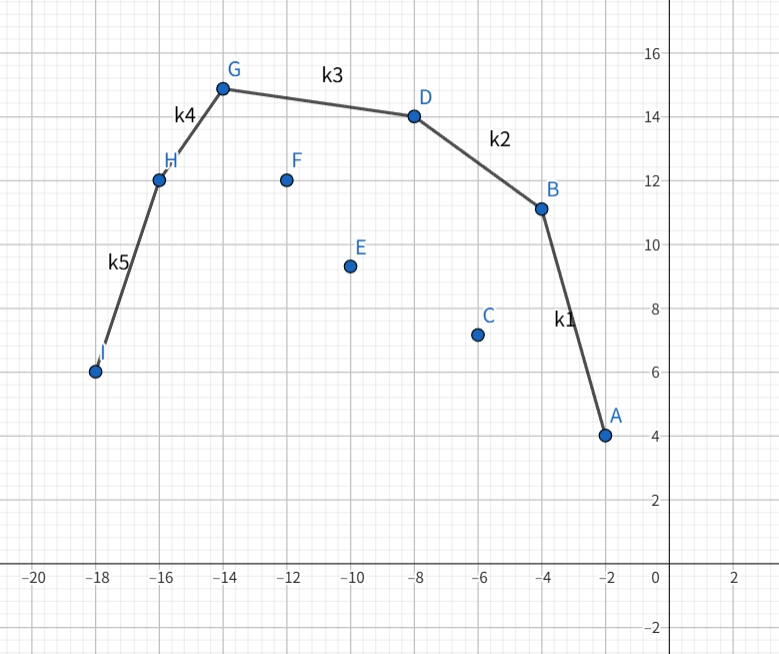
由性质可知 \(k1 < k2 < k3 < k4 < k5\),所以队列的队尾的斜率是越来越大的,得到第二个条件。
while(head+1<=tail&&slopeU(q[tail-1],q[tail])*slopeD(q[tail],i)>=slopeU(q[tail],i)*slopeD(q[tail-1],q[tail]))
--tail;
这里要提一个点,这里特殊的在于 \(a < 0\),所以像【引入】中提到的 \(x,k\) 中的常数项可以互相转化的情况不能直接搬用,需要细细考虑:
当 \(x = g_j , k = 2ag_i\) 时,\(x\) 是单调递增,而 \(k\) 是单调递减。
【Step 1】:
\(2ag_i(g_{j2} - g_{j1}) \le f_{j2} + ag_{j2} ^ 2 - bg_{j2} - ( f_{j1} + ag_{j1} ^ 2 - bg_{j1} )\)
此时 \(g_{j2} - g_{j1} > 0\),也不需要变号:
\(2ag_i \le \frac{y_{j2} - y_{j1}}{x_{j2} - x_{j1}}\)
while(head+1<=tail&&slopeU(q[head],q[head+1])>=2*a*g[i]*slopeD(q[head],q[head+1]))
++head;
【Step 2】:
凸壳的图像变成:
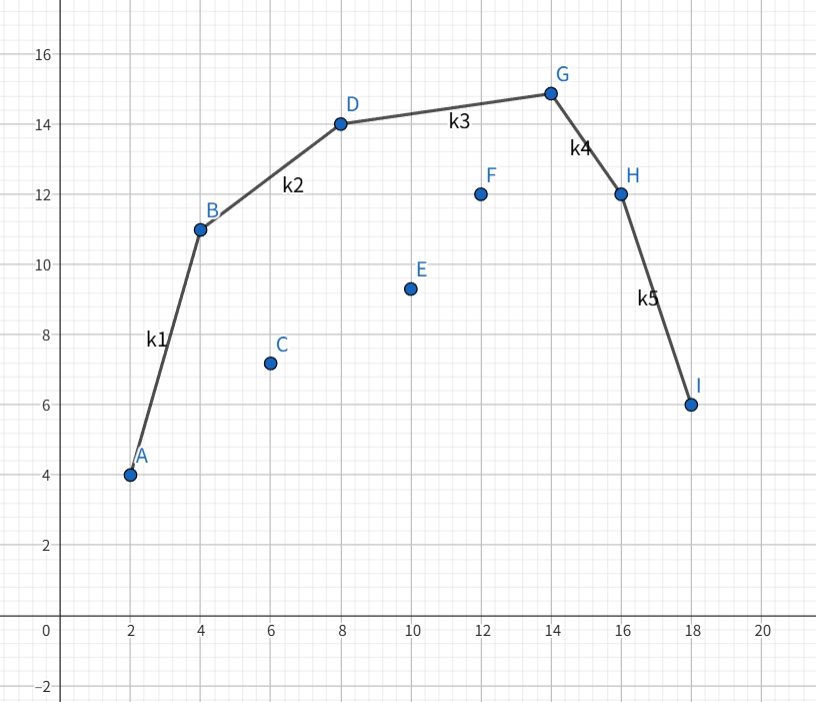
此时 \(k1 > k2 > k3 > k4 > k5\),说明队尾的斜率是越来越小的。
while(head+1<=tail&&slopeU(q[tail-1],q[tail])*slopeD(q[tail],i)<=slopeU(q[tail],i)*slopeD(q[tail-1],q[tail]))
--tail;
注意观察和上面第一种取法的区别。
还需要注意的是在程序中若 \(f_0\) 不为 \(0\),初始也需要把其加入凸壳的队列中,平常最好有没有都加,养成好习惯!!!
Code1
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=1e6+10;
int n,a,b,c,p[N];
int f[N],g[N];
int q[N],head=1,tail;
inline int Y(int i) {
return f[i]+a*g[i]*g[i]-b*g[i];
}
inline int X(int i) {
return 2*a*g[i];
}
inline int slopeU(int i,int j) {
return Y(j)-Y(i);
}
inline int slopeD(int i,int j) {
return X(j)-X(i);
}
signed main() {
scanf("%lld%lld%lld%lld",&n,&a,&b,&c);
for(int i=1;i<=n;i++) {
scanf("%lld",&p[i]);
g[i]=g[i-1]+p[i];
}
memset(f,0xcf,sizeof f);
f[0]=0,q[++tail]=0;
for(int i=1;i<=n;i++) {
while(head+1<=tail&&slopeU(q[head],q[head+1])>=g[i]*slopeD(q[head],q[head+1]))
++head;
int j=q[head];
int x=g[i]-g[j];
f[i]=max(f[j]+a*x*x+b*x+c,f[i]);
while(head+1<=tail&&slopeU(q[tail-1],q[tail])*slopeD(q[tail],i)>=slopeU(q[tail],i)*slopeD(q[tail-1],q[tail]))
--tail;
q[++tail]=i;
}
printf("%lld\n",f[n]);
return 0;
}
Code2
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=1e6+10;
int n,a,b,c,p[N];
int f[N],g[N];
int q[N],head=1,tail;
inline int Y(int i) {
return f[i]+a*g[i]*g[i]-b*g[i];
}
inline int X(int i) {
return g[i];
}
inline int slopeU(int i,int j) {
return Y(j)-Y(i);
}
inline int slopeD(int i,int j) {
return X(j)-X(i);
}
signed main() {
scanf("%lld%lld%lld%lld",&n,&a,&b,&c);
for(int i=1;i<=n;i++) {
scanf("%lld",&p[i]);
g[i]=g[i-1]+p[i];
}
memset(f,0xcf,sizeof f);
f[0]=0,q[++tail]=0;
for(int i=1;i<=n;i++) {
while(head+1<=tail&&slopeU(q[head],q[head+1])>=2*a*g[i]*slopeD(q[head],q[head+1]))
++head;
int j=q[head];
int x=g[i]-g[j];
f[i]=max(f[j]+a*x*x+b*x+c,f[i]);
while(head+1<=tail&&slopeU(q[tail-1],q[tail])*slopeD(q[tail],i)<=slopeU(q[tail],i)*slopeD(q[tail-1],q[tail]))
--tail;
q[++tail]=i;
}
printf("%lld\n",f[n]);
return 0;
}
李超线段树优化
前置知识
- 李超线段树
- 离散化
Solution
设 \(f_i\) 表示连接前 \(i\) 根柱子的最小代价,\(g_i\) 表示拆除前 \(i\) 根柱子的代价,前缀和维护区间拆除柱子所需的代价,由此可以列出转移方程式:
\(f_i = min \{ f_j + (h_i - h_j) ^ 2 + (g_{i-1} - g_j) \},0 < j < i\)
同样的,看到复杂的转移式,直接展开并得到:
\(f_j + h_j ^ 2 - g_j = 2h_ih_j + f_i - h_i ^ 2 - g_{i-1}\)
按照普遍的斜率优化思路把其转化为 \(y = kx + b\) 的形式:
\( \begin{align*} y &= f_j + h_j ^ 2 - g_j \\ x &= 2h_j \\ k &= h_i \\ b &= f_i - h_i ^ 2 - g_{i-1} \end{align*} \)
发现 \(x,k\) 都不具有单调性,故不能使用单调队列维护。
重新展开得到:
\(f_i - h_i ^ 2 - g_{i-1} = -2h_ih_j + f_j + h_j ^ 2 - g_j\)
转化成:
\( \begin{align*} y &= f_i - h_i ^ 2 - g_{i-1} \\ x &= h_i \\ k &= -2h_j \\ b &= f_j + h_j ^ 2 - g_j \end{align*} \)
\(k,b,x\) 都已知,\(y\) 只与 \(i\) 有关,且包含 \(f_i\),\(f_i\) 要取最小值,转换为:
有用 \(k_j,b_j\) 表示的 \(i-1\) 条直线 \(j\),求所有直线在 \(x\) 处最小的 \(y\) 的取值。
那不妥妥地用李超线段树维护啊,最后需要注意值域过大时要离散化,时间复杂度为 \(O(n\log^2{n})\)。
Code
#include<bits/stdc++.h>
#define int long long
#define lson rt<<1
#define rson rt<<1|1
#define M(x,y) make_pair(x,y)
using namespace std;
typedef pair<double,int> pdl;
const double inf=1e18;
const double eps=1e-9;
const int N=1e5+10;
int n,h[N],w[N],s[N];
int unq[N],uh[N],f[N];
struct Line {
double k,b;
} l[N];
int cnt,rd[N*4];
inline int cmp(double x,double y) {
if(x-y>eps)
return 1;
if(y-x>eps)
return -1;
return 0;
}
inline double calcY(int id,int x) {
if(id==0) return inf;
return l[id].b+l[id].k*x;
}
inline void upd(int rt,int l,int r,int x) {
int mid=(l+r)>>1;
int &y=rd[rt];
int tp=cmp(calcY(x,unq[mid]),calcY(y,unq[mid]));
if(tp==-1||(!tp&&x<y))
swap(x,y);
int tl=cmp(calcY(x,unq[l]),calcY(y,unq[l]));
int tr=cmp(calcY(x,unq[r]),calcY(y,unq[r]));
if(tl==-1||(!tl&&x<y))
upd(lson,l,mid,x);
if(tr==-1||(!tr&&x<y))
upd(rson,mid+1,r,x);
return ;
}
inline void update(int rt,int l,int r,int s,int t,int x) {
if(s<=l&&r<=t) {
upd(rt,l,r,x);
return ;
}
int mid=(l+r)>>1;
if(s<=mid) update(lson,l,mid,s,t,x);
if(mid<t) update(rson,mid+1,r,s,t,x);
return ;
}
inline pdl pmin(pdl x,pdl y) {
if(cmp(x.first,y.first)==-1)
return x;
if(cmp(x.first,y.first)==1)
return y;
if(x.second<y.second)
return x;
return y;
}
inline pdl query(int rt,int l,int r,int x) {
if(l>x||r<x)
return M(inf,0);
double res=calcY(rd[rt],unq[x]);
if(l==r)
return M(res,rd[rt]);
int mid=(l+r)>>1;
return pmin(M(res,rd[rt]),pmin(query(lson,l,mid,x),query(rson,mid+1,r,x)));
}
signed main() {
scanf("%lld",&n);
for(int i=1;i<=n;i++) {
scanf("%lld",&h[i]);
unq[i]=h[i];
}
for(int i=1;i<=n;i++) {
scanf("%lld",&w[i]);
s[i]=s[i-1]+w[i];
}
sort(unq+1,unq+n+1);
int m=unique(unq+1,unq+n+1)-unq-1;
for(int i=1;i<=n;i++)
uh[i]=lower_bound(unq+1,unq+m+1,h[i])-unq;
for(int i=1;i<=n;i++) {
if(i!=1) {
pdl p=query(1,1,m,uh[i]);
int j=p.second;
f[i]=f[j]+(h[i]-h[j])*(h[i]-h[j])+(s[i-1]-s[j]);
}
++cnt;
l[cnt].k=-2*h[i];
l[cnt].b=f[i]+h[i]*h[i]-s[i];
update(1,1,m,1,m,cnt);
}
printf("%lld\n",f[n]);
return 0;
}
小总结
带大家理解一下单调队列和李超线段树在维护斜率优化时的不同。
单调队列/Splay维护
- 闲话:虽然我不怎么用 Splay...
实质:\(b = y - kx\)
\(x,y\) 只与 \(j\) 有关,且前面已经求出;
\(k\) 只与 \(i\) 有关且已知,\(b\) 只与 \(i\) 有关且包含 \(f_i\),要求 \(f_i\) 的最值,就可以转换为:
找到一个点 \((x,y)\),用斜率为 \(k\) 的直线切这个点得到与 \(y\) 轴的交点 \(b\) 的值最大/小,即最大/小截距。
与 \(x,k\) 的单调性都有关。
李超线段树维护
实质:\(y = kx + b\)
\(k,b\) 只与 \(j\) 有关,且前面已经求出;
\(x\) 只与 \(i\) 有关且已知,\(y\) 只与 \(i\) 有关且包含 \(f_i\),要求 \(f_i\) 的最值,就可以转换为:
找到一条直线 \((k,b)\),使得在 \(x\) 处得到 \(y\) 的值最大/小。
与 \(x,k\) 的单调性无关。
综上所述,看到转移式先展开,若 \(x,k\) 都具有单调性,直接单调队列暴力维护;否则全部套李超线段树即可。
如果学了其他的更好的优化方法,按题目的类型随机应变。
后记
可能有些的不足的地方,多多包涵!!!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号