
SLAM是Simultaneous Localization and Mapping的缩写,字面意思是“同时定位与地图建模”,SLAM算法广泛应用在自动驾驶,机器人,增强现实中,也是计算机视觉研究的重要领域之一。有了SLAM算法,自动驾驶的车辆可以实时创建地图并且同时在地图上定位,扫地机器人知道如何避障以及记住扫过的区域,无人机可以在一个未知的环境中送快递。SLAM可以分为Visual SLAM(可视化SLAM),Lidar SLAM(激光雷达SLAM),Multi-Sensor SLAM(多传感器SLAM).其中Lidar SLAM因为要配备昂贵的激光雷达,并且扫描的精度确实不高限制了它广泛使用。Visual SLAM因为只需要廉价的相机得到了广泛的研究和使用。Multi-Sensor SLAM则需要配备诸如相机,IMU(惯性测量单元),GPS,雷达等多个传感器,具有在不同光照条件和气候条件有稳定输出的良好性能,但其实质只是Visual SLAM和位置传感器的信息融合处理。这里主要讲解Visual SLAM.
Visual SLAM大致可以粗略地分为两类:Sparse SLAM(稀疏SLAM)和Dense SLAM(稠密SLAM).Sparse SLAM使用图片中的特征点进行计算,代表算法为PTAM,ORB-SLAM,Dense SLAM主要通过图片的整体亮度信息进行计算,代表算法包括DTAM,LSD-SLAM,DSO,SVO.这里主要讲解Sparse Visual SLAM.
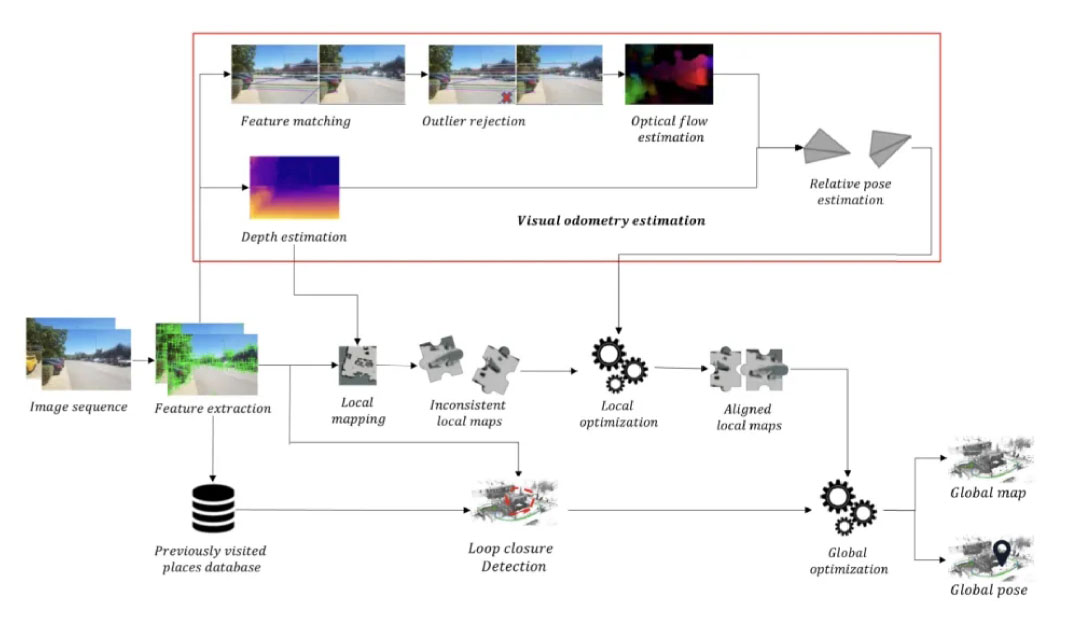
如图Sparse Visual SLAM可以分为三个核心模块:
1.Feature Extration & Visual Odometry(特征提取与视觉里程)
2.Local Mapping & Optimization(局部地图生成与优化)
3.Loop Closure & Global Optimization(回环检测与全局优化)
下面逐一介绍。
一.Feature Extration & Visual Odometry(特征提取与视觉里程)。
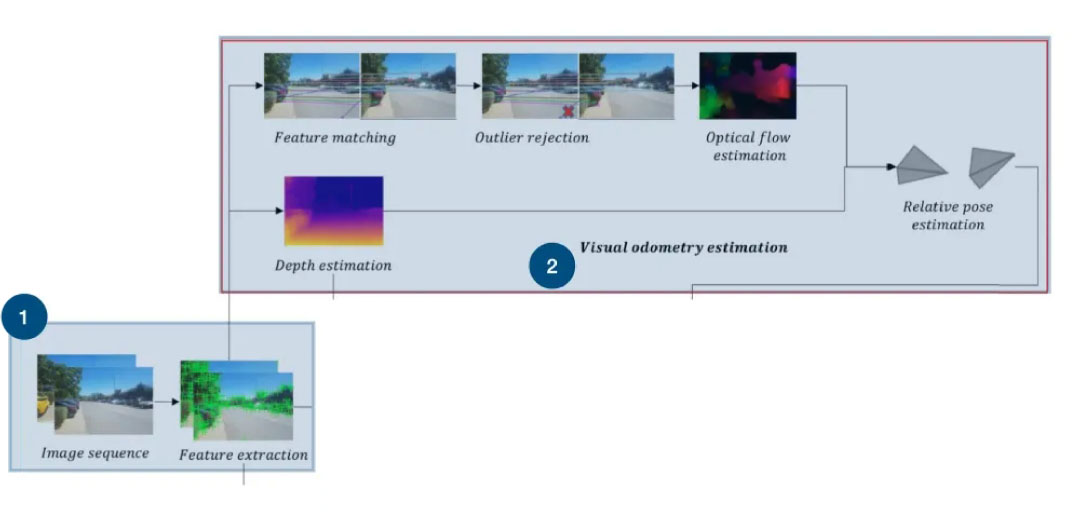
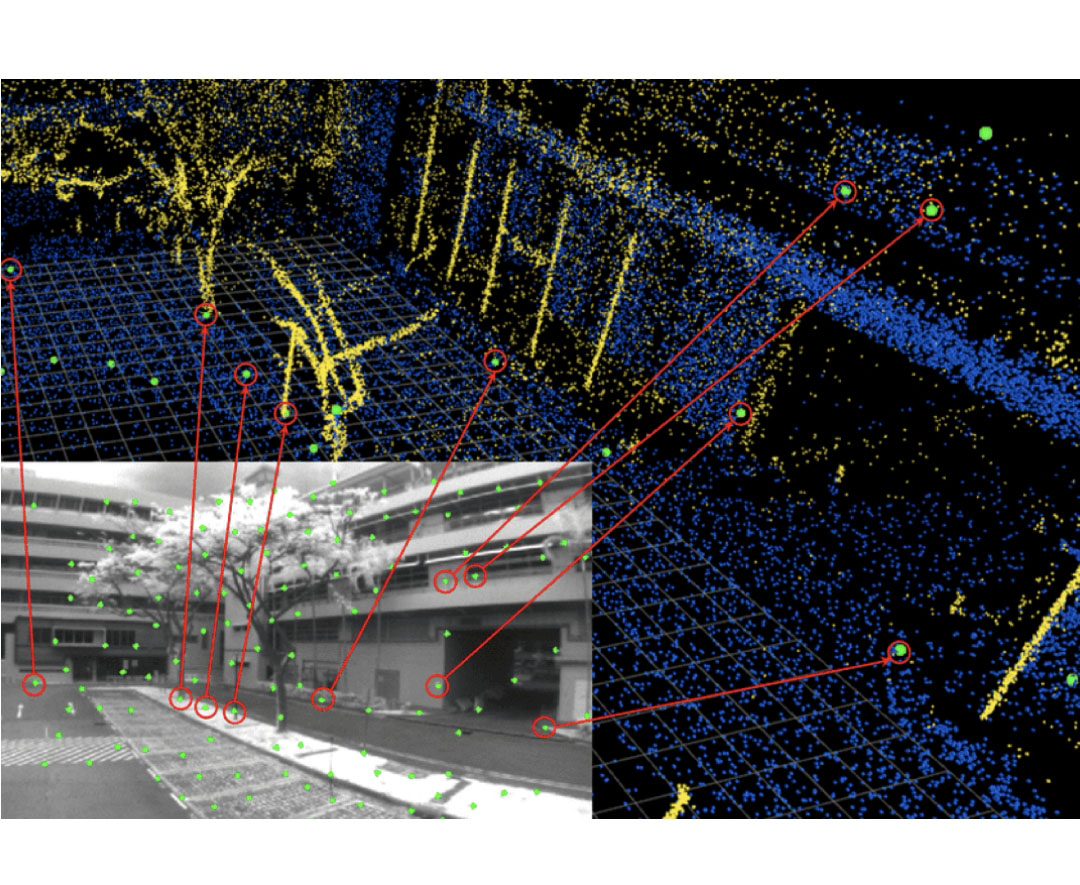
先讲特征提取,特征提取是指找出来图片上的视觉特征点(边,角,梯度...),下图为图片上找到的特征点和Lidar的点阵云。
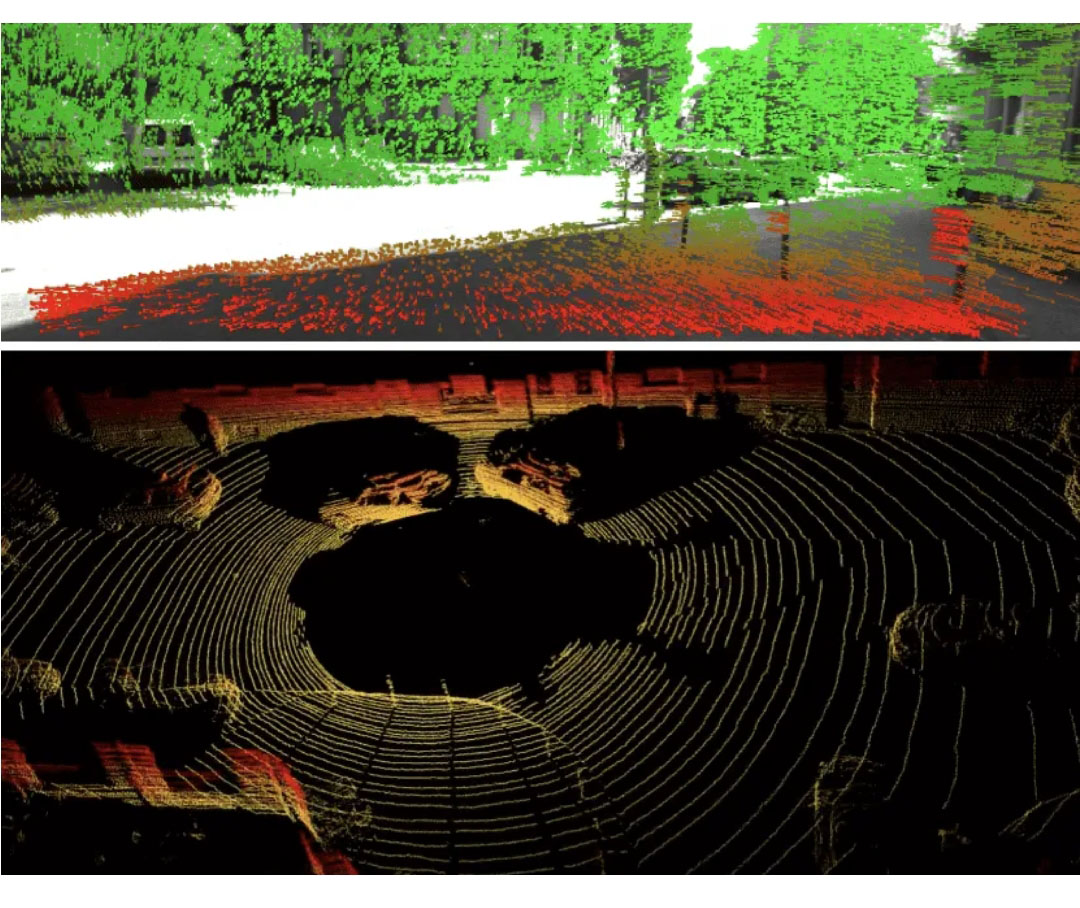
特征提取的要点主要包括:
Corner Detectors: FAST (Features from Accelerated Segment Test), Harris corner detector.
Blob Detectors: SIFT (Scale-Invariant Feature Transform), SURF (Speeded-Up Robust Features).
Edge Detectors: Canny edge detector.
Feature Descriptors: ORB (Oriented FAST and Rotated BRIEF), BRIEF (Binary Robust Independent Elementary Features), BRISK (Binary Robust Invariant Scalable Keypoints).
下面讲视觉里程。
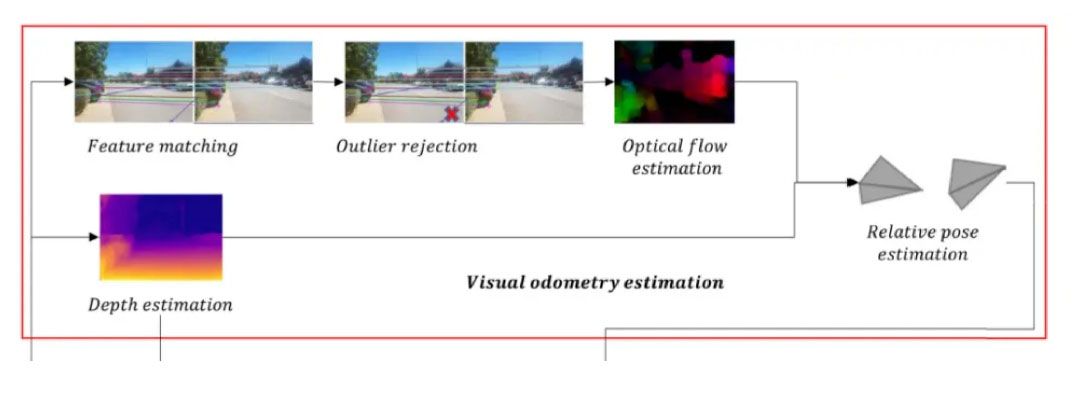
视觉里程用于计算相机和特征点的相对于上一帧位置变化情况。
Feature Matching: 特征点的匹配和跟踪。
Outlier Rejection:去掉错误匹配的特征点,通常使用RANSAC算法。
Optical Flow Estimation:计算出每个特征点按照时间的位移量。
Depth Estimation: 知道图片的景深信息通常是很有用的,相较与使用单个相机,使用stereo相机可以更容易地得到景深信息。
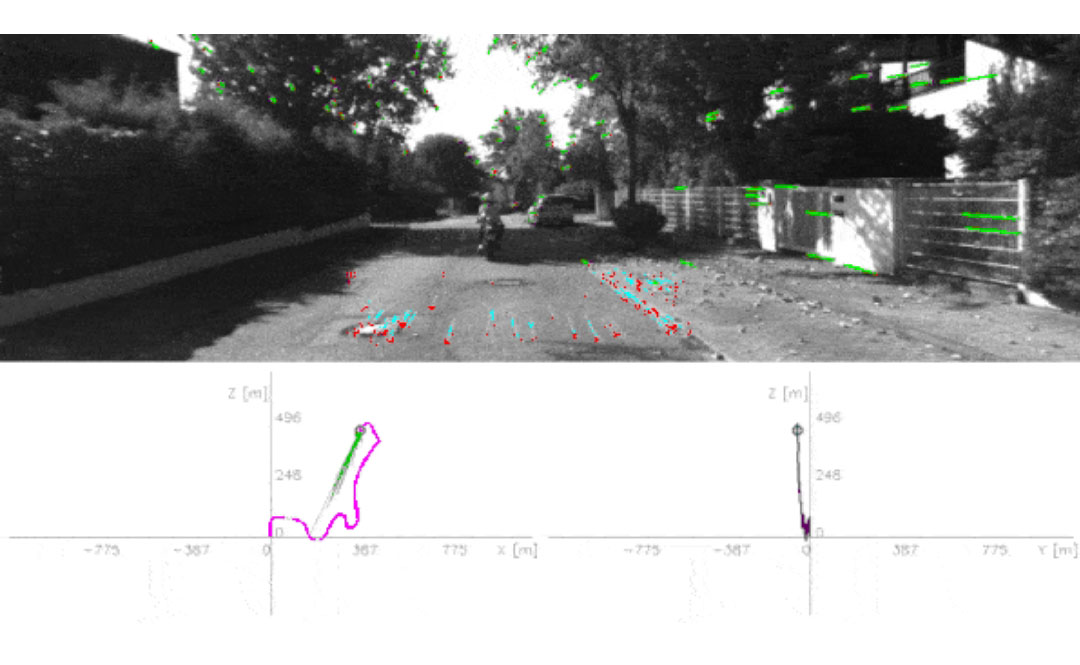
下图为经过视觉里程计算得到的信息。
二.Local Optimization & Mapping(局部地图生成与优化).
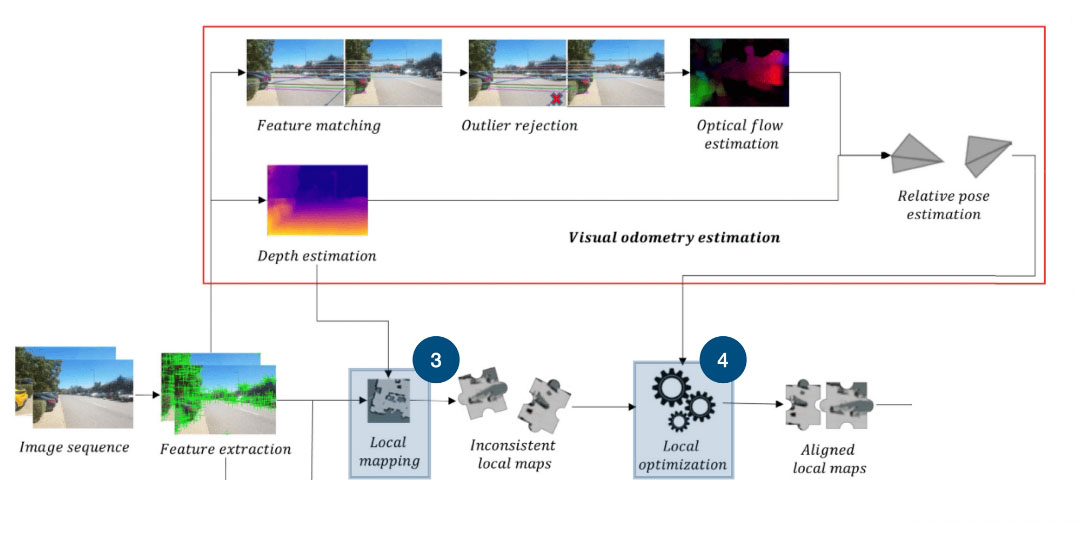
Local Mapping是Visual SLAM算法的核心。Visual Features是在图片上二维的顶点,需要通过计算把二维顶点投射到三维空间中。如下图所示。
如果我们每一帧都把二维特征点投影到三维场景中,就会有累计误差,这就涉及到局部优化的问题,通过使用ICP(itertive closest point)进行优化。
三.Loop Closure & Global Optimization(回环检测与全局优化).
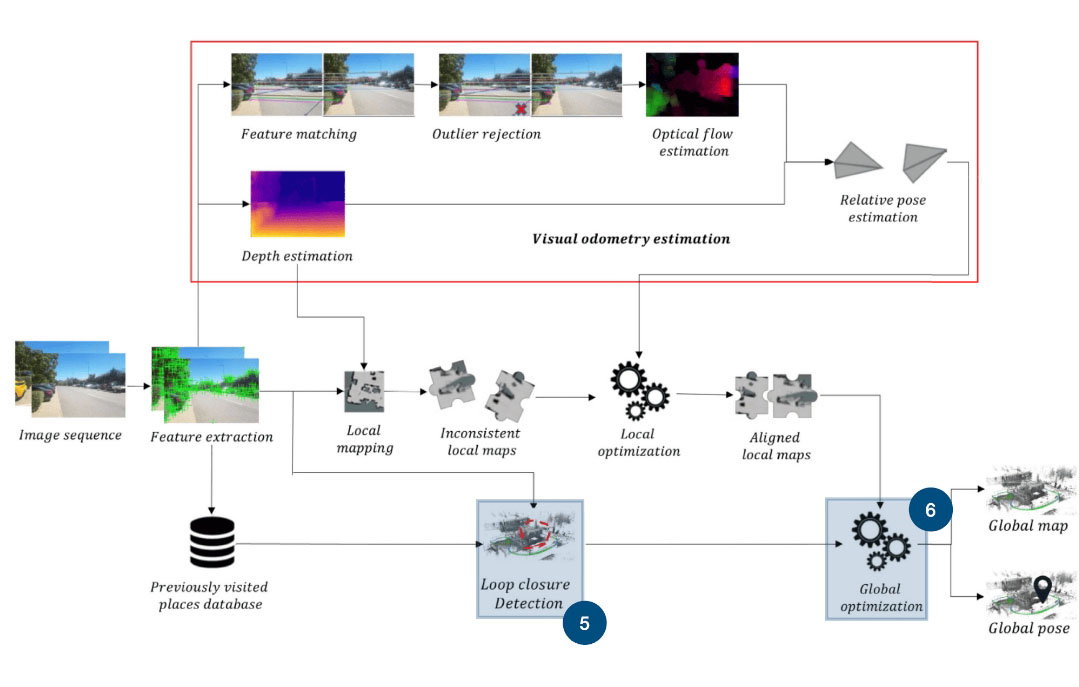
回环检测主要指当相机在地图中逛了一段时间之后,又回来曾经访问过的地点,地图上的特征点将会出现某种程度上的重合,这就需要回环修正。
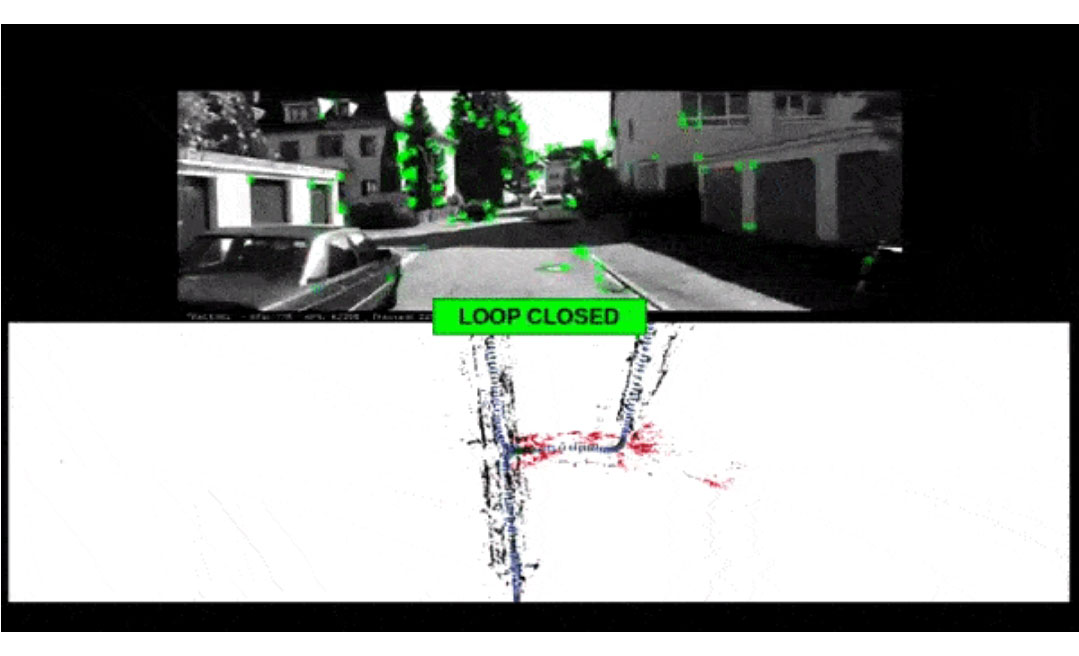
全局优化把所有的局部地图聚合在一起,进行全局优化,全局优化通常使用Bundle Adjustment.
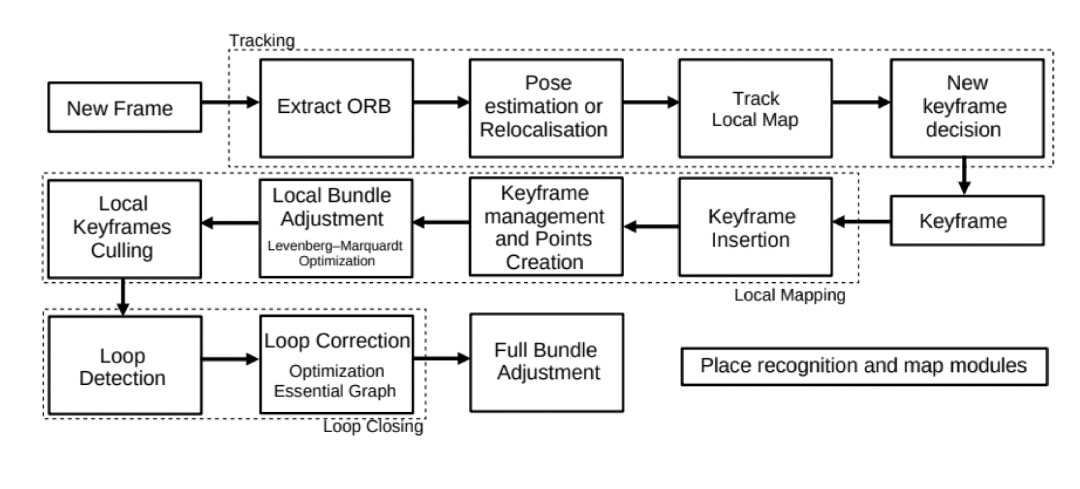
讲完了Visual SLAM的大致流程,下面看看ORB-SLAM的主要模块。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号