虚树学习笔记
问题引入
在 消耗战 一题中,经常做树形 dp 的小朋友肯定都可以一眼看出这题的朴素算法。
令 \(dp_i\) 为将其子树中(包括自己)的关键点切除所需的最少代价。由此可以列出 dp 式:
当 i 不是关键点的时候,有 $dp_i = \sum_{v\in son(i)}dp_v $。并且所有点的 dp 值都可以等于自己上面最小的边权。
可是这样做明显会超时,怎么优化它呢。通过观察我们不难发现,dp 的状态转移只和关键点有关,因而虚树。虚树可以将关键点单独提出建成一颗新的树,这棵树在结构上与原树相同,但是复杂度可以降低很多,足以通过本题。
虚树 🌲
观察可发现,虚树上的点只可能是关键点或者关键点的 LCA 。但为了方便,一般会把 1 号节点一起放进去。
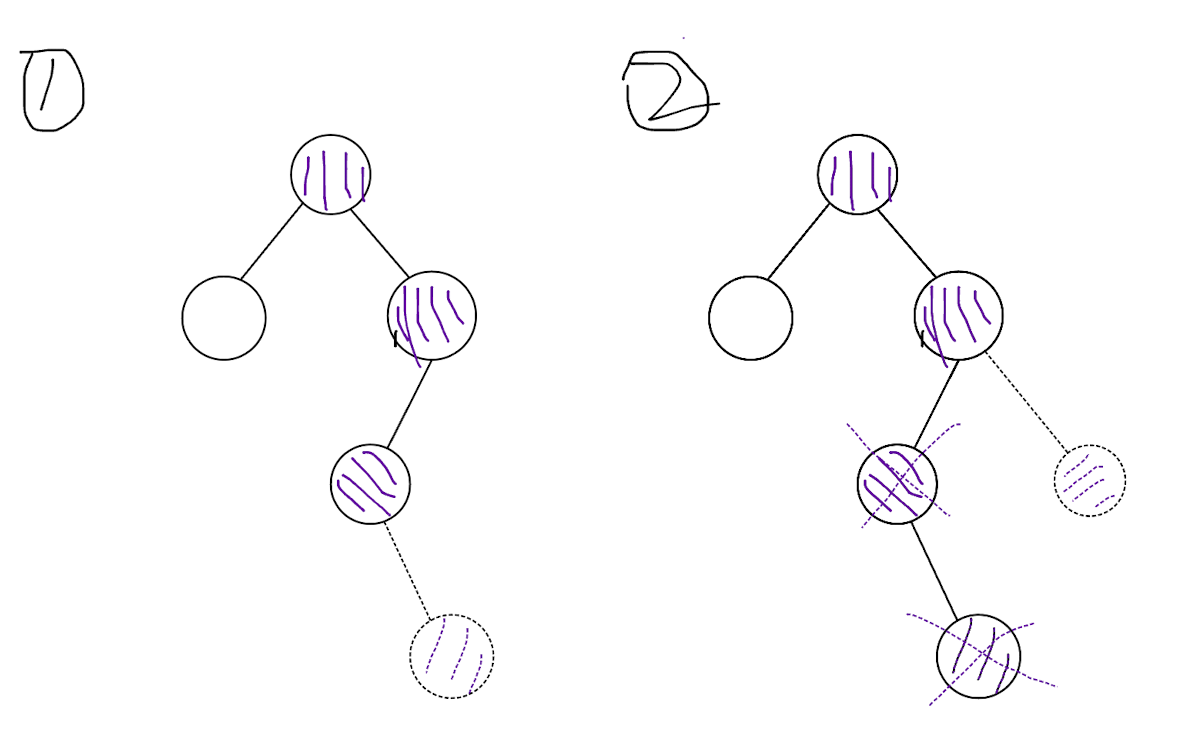
先将关键点按 dfn 排序,再依次插入树中。在此过程中维护一个最右链,最右链 dfn 递增,且所有在最右链左边的关键点都被处理过。这个链可以用单调栈维护。
插入一个点的时候,如果它在最右链底端点的子树,直接塞入栈中。否则弹栈直到栈顶是其祖先。
特别的,当新点与前最右链中的点的 LCA 还不在树中时,需要同时加入它。
值得注意的是,用完虚数后需还原,要不然会出错。
Code
//
// 虚树.cpp
//
// P2495 [SDOI2011] 消耗战
// Created by HurryCine on 2024/8/3.
//
#include <stdio.h>
#include <iostream>
#include <stack>
#include <cstring>
#include <vector>
#include <algorithm>
using namespace std;
const int N = 5e5;
#define int long long
typedef struct{
int to;
int w;
int nxt;
}Edge;
Edge edge[N<<1];
int head[N];
int cnt;
inline void add_edge(int u, int v, int w){
edge[cnt].to = v;
edge[cnt].nxt = head[u];
edge[cnt].w = w;
head[u] = cnt++;
}
namespace Graph { //ST表求LCA
int tot;
int eu[N<<1];
int idx[N];
int dep[N<<1];
inline void dfs(int x, int fa){
eu[++tot] = x;
idx[x] = tot;
dep[tot] = dep[idx[fa]]+1;
for(int i = head[x]; ~i; i = edge[i].nxt)
if(edge[i].to != fa){
dfs(edge[i].to, x);
eu[++tot] = x;
dep[tot] = dep[idx[x]];
}
return;
}
int ST[N<<1][30];
int lg[N<<1];
inline int get_ans(int x, int y){
return dep[x] > dep[y] ? y : x;
}
inline void init_ST(){
for(int i = 1; i <= tot; i++){
lg[i] = lg[i-1];
if(1<<lg[i-1] == i)
lg[i]++;
}
for(int i = 1; i <= tot; i++)
ST[i][0] = i;
for(int i = 1; (1<<i) <= tot; i++){
for(int l = 1; l+(1<<i)-1 <= tot; l++){
int r = l+(1<<i)-1;
int mid = (l+r) >> 1;
ST[l][i] = get_ans(ST[l][i-1], ST[mid+1][i-1]);
}
}
}
inline void init_LCA(){
tot = 0;
dfs(1, 0);
init_ST();
}
inline int LCA(int x, int y){
x = idx[x];
y = idx[y];
if(x > y)
swap(x, y);
int len = lg[y-x+1]-1;
return eu[get_ans(ST[x][len], ST[y-(1<<len)+1][len])];
}
};
int dfn[N];
int dep[N];
int minv[N]; //从 1 到 i 路径中的最小边权
inline void dfs(int x, int fa){
dfn[x] = ++cnt;
for(int i = head[x]; ~i; i = edge[i].nxt)
if(edge[i].to != fa){
dep[edge[i].to] = dep[x] + edge[i].w;
minv[edge[i].to] = min(minv[x], edge[i].w);
dfs(edge[i].to, x);
}
return;
}
Edge Vedge[N<<1];
int Vhead[N];
bool kee[N];
int cur;
inline bool cmp(int x, int y){
return dfn[x] < dfn[y];
}
inline void add_Vedge(int u, int v){
Vedge[cnt].to = v;
Vedge[cnt].w = 1;
Vedge[cnt].nxt = Vhead[u];
Vhead[u] = cnt++;
}
int n;
int dp[N]; //定义 dp[i] 为将 i 的子树切下的最小代价
inline void build_VTree(vector<int>key){
cnt = 0;
sort(key.begin(), key.end(), cmp);
stack<int>sta; //栈维护右链
sta.push(1);
dp[1] = 0;
for(auto i : key){
int lca = Graph::LCA(i, sta.top());
int x;
while(!sta.empty() && dep[sta.top()] > dep[lca]){
x = sta.top();
sta.pop();
if(dep[sta.top()] >= dep[lca]){
add_Vedge(x, sta.top());
add_Vedge(sta.top(), x);
}
}
if(sta.top() != lca){ //如果 lca 不在链上,加入并连边
sta.push(lca);
dp[lca] = 0;
add_Vedge(x, lca);
add_Vedge(lca, x);
}
sta.push(i);
dp[i] = 0;
}
while(sta.size() > 1){
int x = sta.top();
sta.pop();
add_Vedge(x, sta.top());
add_Vedge(sta.top(), x);
}
return;
}
inline void DP(int x, int fa){
dp[x] = 0;
for(int i = Vhead[x]; ~i; i = Vedge[i].nxt)
if(Vedge[i].to != fa){
DP(Vedge[i].to, x);
dp[x] += dp[Vedge[i].to];
}
if(kee[x]) //关键点可以直接删去
dp[x] = minv[x];
else
dp[x] = min(dp[x], minv[x]);
Vhead[x] = -1;
kee[x] = false;
return;
}
signed main(){
memset(head, -1, sizeof(head));
scanf("%lld", &n);
for(int i = 1; i < n; i++){
int u, v, w;
scanf("%lld%lld%lld", &u, &v, &w);
add_edge(u, v, w);
add_edge(v, u, w);
}
cnt = 0;
memset(minv, 0x3f, sizeof(minv));
dfs(1, 0);
Graph::init_LCA();
int m;
cin >> m;
memset(Vhead, -1, sizeof(Vhead));
while(m--){
int k;
scanf("%lld", &k);
vector<int>v;
while(k--){
int x;
scanf("%lld", &x);
kee[x] = true;
v.push_back(x);
}
build_VTree(v);
DP(1, 0);
printf("%lld\n", dp[1]);
}
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号