中国荷斯坦牛建模相关技术的研究(Open3D、D435)
- 相关环境
- Open3D(https://github.com/IntelVCL/Open3D/)
- D435(https://github.com/IntelRealSense/librealsense)
- Open3D环境的安装
备注:官方版本有更新,遇到问题以官方说明为准
1.Python环境安装
Open3D安装成功导出一个Python库以供调用,网上有Open3D教程基于Python2.7,此处使用的Python版本为3.7,经测试可用。
Python安装可前往官网下载:https://www.python.org/ ,安装时可勾选添加环境变量以免仍需自己配置。
2.Cmake环境安装
Cmake允许开发者编写一种平台无关的 CMakeList.txt 文件来定制整个编译流程,然后再根据目标用户的平台进一步生成所需的本地化 Makefile 和工程文件
在官网下载最新版本:https://cmake.org ,安装时勾选添加环境变量。

3.Visual Studio环境安装
Visual Studio可前往官网下载:https://visualstudio.microsoft.com/
Open3D官方推荐版本为2015,此处使用VS2017编译成功
4.Open3D编译
前往github下载最新的代码:https://github.com/IntelVCL/Open3D
参考官方文档:http://www.open3d.org/docs/getting_started.html
使用Cmake最终可在Open3D文件夹下过的build文件夹,后续研究大部分基于此文件夹。
配置成功在python中输入import open3d应该可以正常运行
- D435环境的安装
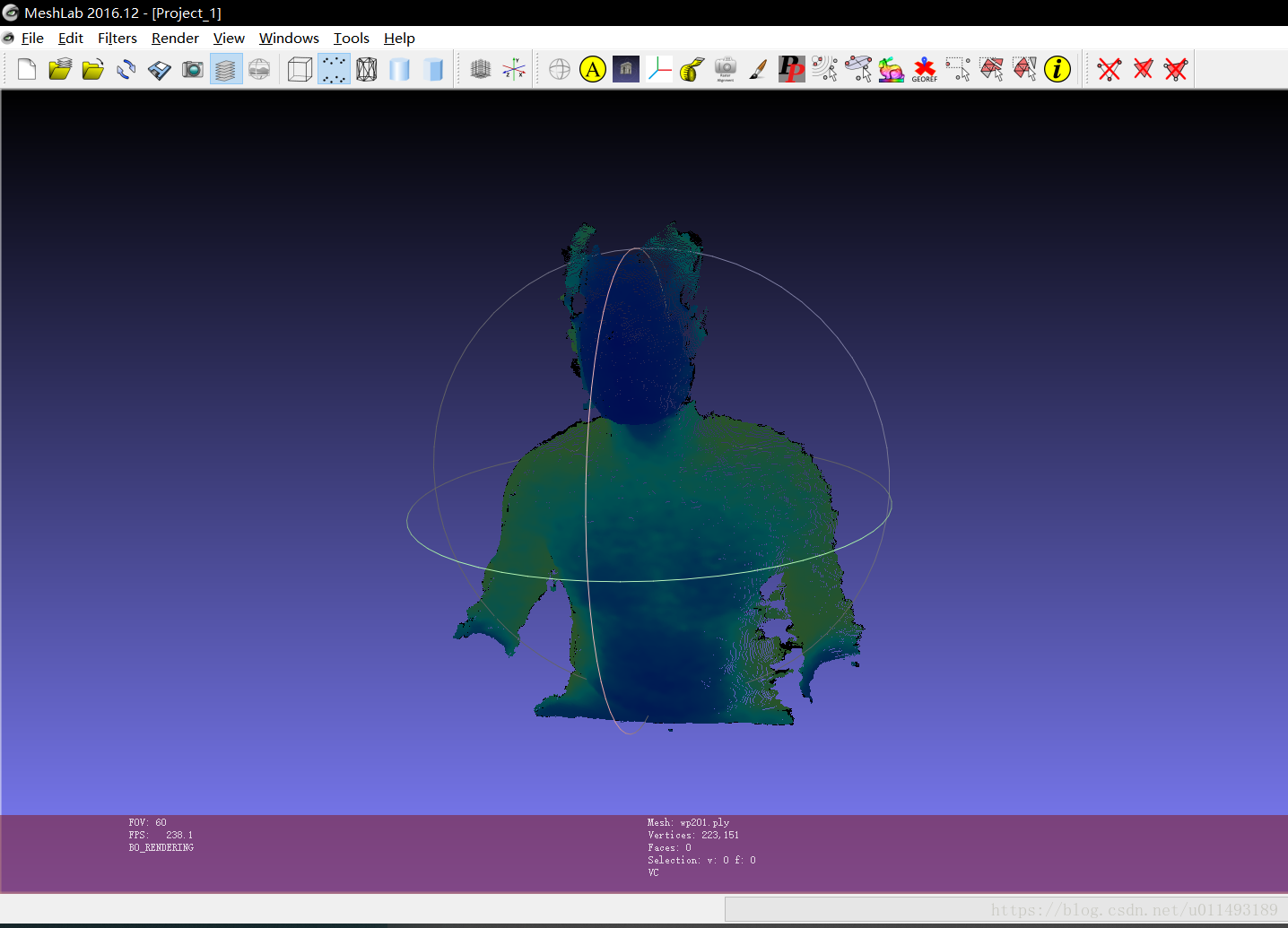
1.MeshLab安装
MeshLab用于打开相机导出的数据。
在官网下载最新版:http://www.meshlab.net/#download
按照提示安装即可。
2.D435安装SDK
在github上下载官方SDK:
https://github.com/IntelRealSense/librealsense/releases
其中主要是:Intel.RealSense.Viewer.exe
插入D435相机,运行Intel.RealSense.Viewer.exe,可在右方显示相机图像。
打开RGB通道与Depth通道,切换为3D模式,可导出ply文件
- 运行代码
为了方便调试代码,推荐把需要调试的代码与数据复制到其他文件夹操作。
合成代码:https://paste.ubuntu.com/p/gq2SwfjVss/
import numpy as np
import open3d
from open3d import registration_ransac_based_on_feature_matching as RANSAC
from open3d import registration_icp as ICP
from open3d import compute_fpfh_feature as FPFH
from open3d import get_information_matrix_from_point_clouds as GET_GTG
def register(pcd1, pcd2, size):
kdt_n = open3d.KDTreeSearchParamHybrid(radius=size, max_nn=50)
kdt_f = open3d.KDTreeSearchParamHybrid(radius=size * 10, max_nn=50)
pcd1_d = open3d.voxel_down_sample(pcd1, size)
pcd2_d = open3d.voxel_down_sample(pcd2, size)
open3d.estimate_normals(pcd1_d, kdt_n)
open3d.estimate_normals(pcd2_d, kdt_n)
pcd1_f = FPFH(pcd1_d, kdt_f)
pcd2_f = FPFH(pcd2_d, kdt_f)
checker = [open3d.CorrespondenceCheckerBasedOnEdgeLength(0.9),
open3d.CorrespondenceCheckerBasedOnDistance(size * 2)]
est_ptp = open3d.TransformationEstimationPointToPoint()
est_ptpln = open3d.TransformationEstimationPointToPlane()
criteria = open3d.RANSACConvergenceCriteria(max_iteration=400000,
max_validation=500)
result1 = RANSAC(pcd1_d, pcd2_d,
pcd1_f, pcd2_f,
max_correspondence_distance=size * 2,
estimation_method=est_ptp,
ransac_n=4,
checkers=checker,
criteria=criteria)
result2 = ICP(pcd1, pcd2, size, result1.transformation, est_ptpln)
return result2.transformation
def merge(pcds):
all_points = []
for pcd in pcds:
all_points.append(np.asarray(pcd.points))
merged_pcd = open3d.PointCloud()
merged_pcd.points = open3d.Vector3dVector(np.vstack(all_points))
return merged_pcd
def add_color_normal(pcd): # in-place coloring and adding normal
pcd.paint_uniform_color(np.random.rand(3))
size = np.abs((pcd.get_max_bound() - pcd.get_min_bound())).max() / 30
kdt_n = open3d.KDTreeSearchParamHybrid(radius=size, max_nn=50)
open3d.estimate_normals(pcd, kdt_n)
def load_pcds(pcd_files):
pcds = []
for f in pcd_files:
pcd = open3d.read_point_cloud(f)
add_color_normal(pcd)
pcds.append(pcd)
return pcds
def align_pcds(pcds, size):
pose_graph = open3d.PoseGraph()
accum_pose = np.identity(4)
pose_graph.nodes.append(open3d.PoseGraphNode(accum_pose))
n_pcds = len(pcds)
for source_id in range(n_pcds):
for target_id in range(source_id + 1, n_pcds):
source = pcds[source_id]
target = pcds[target_id]
trans = register(source, target, size)
GTG_mat = GET_GTG(source, target, size, trans)
if target_id == source_id + 1:
accum_pose = np.matmul(trans, accum_pose)
pose_graph.nodes.append(open3d.PoseGraphNode(np.linalg.inv(accum_pose)))
pose_graph.edges.append(open3d.PoseGraphEdge(source_id,
target_id,
trans,
GTG_mat,
uncertain=True))
solver = open3d.GlobalOptimizationLevenbergMarquardt()
criteria = open3d.GlobalOptimizationConvergenceCriteria()
option = open3d.GlobalOptimizationOption(
max_correspondence_distance=size / 10,
edge_prune_threshold=size / 10,
reference_node=0)
open3d.global_optimization(pose_graph,
method=solver,
criteria=criteria,
option=option)
for pcd_id in range(n_pcds):
trans = pose_graph.nodes[pcd_id].pose
pcds[pcd_id].transform(trans)
return pcds
def main():
pcds = load_pcds(["data/test/bun270.ply",
"data/test/bun315.ply",
"data/test/chin.ply",
"data/test/bun000.ply",
"data/test/bun045.ply",
"data/test/bun090.ply",
"data/test/bun180.ply"])
open3d.draw_geometries(pcds, "input pcds")
size = np.abs((pcds[0].get_max_bound() - pcds[0].get_min_bound())).max() / 30
pcd_aligned = align_pcds(pcds, size)
open3d.draw_geometries(pcd_aligned, "aligned")
pcd_merge = merge(pcd_aligned)
add_color_normal(pcd_merge)
open3d.draw_geometries([pcd_merge], "merged")
if __name__ == '__main__':
main()将测试数据与代码放入对应文件夹内
- 打开命令提示符窗口
- cd 代码文件夹(如果不在C盘还需要再键入一行盘符,如D:)
- python main.py(main.py为代码文件夹名称)
环境配置无误的话将依次获得处理结果
- 处理数据
1.通过D435导出ply文件

2.导入MeshLab中,通过上方工具去除多余点
常用操作:
鼠标:旋转模型
Ctrl+鼠标:整体位置拖动
选取某一区域的点:

删除所选的点:ctrl+delete
处理完成后在左上角选择保存。
- 把数据放入指定文件夹中
- 修改代码读取的文件名,即给pcds变量复制的load_pcds函数
- 运行代码查看效果
- 附录
测试数据:
https://download.csdn.net/download/u011493189/10713389
3DCloud基于照片的3D模型构建:
模型展示:
http://www.3dcloud.cn/Member/?m=Models&a=model_view&model_id=10078
所用照片:
https://download.csdn.net/download/u011493189/10713405
备注:
网站功能尚不完善,免费下载额度有限,高精度建模尚未开放,API尚未开放。
正在慢慢完善之中,可观察其后续进展。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号