论文解读(CST)《Cycle Self-Training for Domain Adaptation》
Note:[ wechat:Y466551 | 可加勿骚扰,付费咨询 ]
论文信息
论文标题:Cycle Self-Training for Domain Adaptation
论文作者:Hong Liu, Jianmin Wang, Mingsheng Long
论文来源:2021
论文地址:download
论文代码:download
视屏讲解:click
1-介绍
动机:在无分布偏移条件下,伪标签分布和真标签分布几乎相同,然而在有分布偏移条件下,两者差异很大。即使采用置信度、信息熵等不确定性阈值来筛选,筛选机制的可靠性仍将因为分布偏移而显著下降,最终使得标准自训练在领域自适应问题中失效。
2-相关
事实:分析了有无域位移的伪标签的质量,以更深入地研究UDA中标准自训练的难度。在流行的基准数据集上,当源和目标相同时,分析表明,伪标签分布与地面真实分布几乎相同。然而,由于分布位移,它们的差异可能非常大,有几个类大多被错误地分类为其他类。本文还研究了在域移下用流行标准选择正确伪标签的困难。虽然熵和置信度是没有域移的正确伪标签的合理选择标准,但域移使它们的精度急剧下降。
自训练和循环自训练:
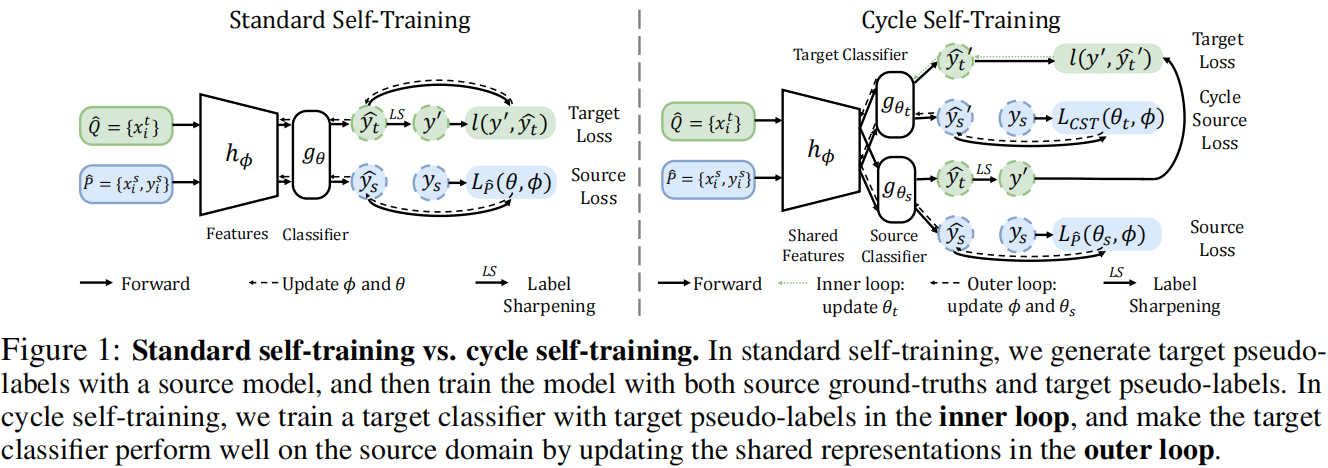
有或没有域移位的伪标签分布:
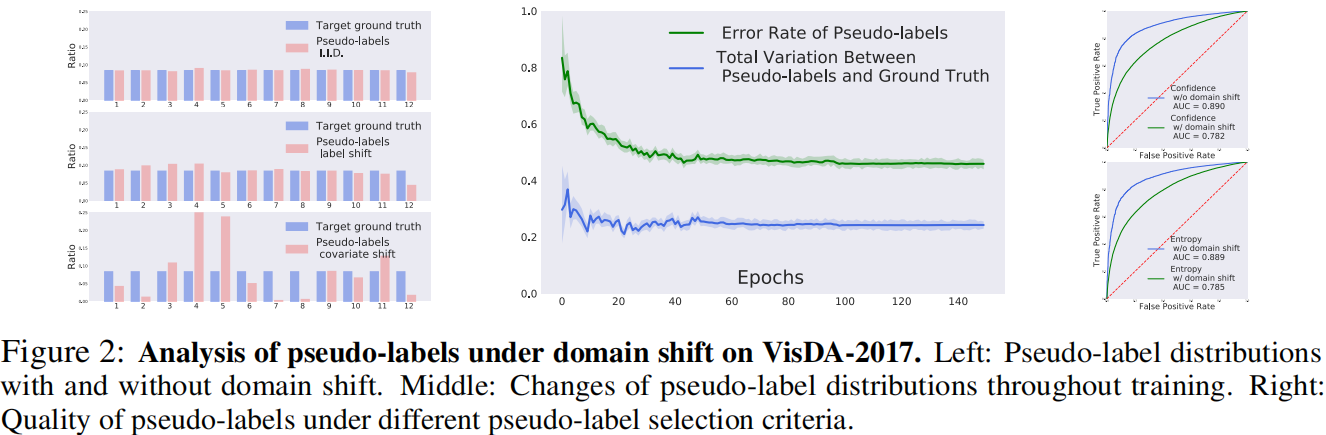
a)当源和目标分布相同时,伪标签的分布与地面真实分布相同,说明伪标签的可靠性。相反,当暴露在标签移位或协变量移位下时,伪标签的分布与目标的基本真实情况有显著的不同;
b)虽然伪标签的错误率继续下降,但 $d_{TV}$ 在整个训练过程中几乎保持不变,保持在 0.26。如果 $d_{TV}$ 收敛到 0.26,则伪标签的精度上限为 0.74,这说明在标准自训练中伪标签的重要去噪能力受到了域移的阻碍;
c)为了减轻虚假伪标签的负面影响,最近的研究提出了基于熵或置信准则[35,21,37,57]的阈值化来选择正确的伪标签。然而,目前尚不清楚这些策略在领域转移下是否仍然有效。在这里,比较了 3 种不同策略所选择的有无域转移的伪标签的质量。对于每种策略,计算不同阈值下的假阳性率和真阳性率,并绘制其ROC曲线;
3-方法
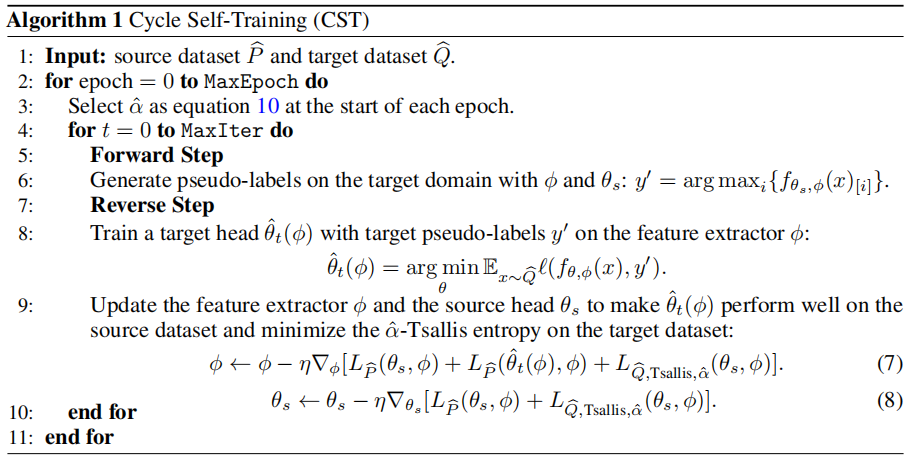
Tsallis Entropy
$S_{\alpha}(y)=\frac{1}{\alpha-1}\left(1-\sum y_{[i]}^{\alpha}\right)$
def entropy(predictions: torch.Tensor, reduction='none') -> torch.Tensor: epsilon = 1e-5 H = -predictions * torch.log(predictions + epsilon) H = H.sum(dim=1) if reduction == 'mean': return H.mean() else: return H class TsallisEntropy(nn.Module): def __init__(self, temperature: float, alpha: float): super(TsallisEntropy, self).__init__() self.temperature = temperature #2.0 self.alpha = alpha #1.9 def forward(self, logits: torch.Tensor) -> torch.Tensor: N, C = logits.shape pred = F.softmax(logits / self.temperature, dim=1) entropy_weight = entropy(pred).detach() entropy_weight = 1 + torch.exp(-entropy_weight) #熵越大值越小 entropy_weight = (N * entropy_weight / torch.sum(entropy_weight)).unsqueeze(dim=1) sum_dim = torch.sum(pred * entropy_weight, dim = 0).unsqueeze(dim=0) #torch.Size([1, C]) result = 1 / (self.alpha - 1) * torch.sum((1 / torch.mean(sum_dim) - torch.sum(pred ** self.alpha / sum_dim * entropy_weight, dim = -1))) return result
因上求缘,果上努力~~~~ 作者:别关注我了,私信我吧,转载请注明原文链接:https://www.cnblogs.com/BlairGrowing/p/17683982.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号