线性回归的从零开始实现
线性回归的从零开始实现
在了解了线性回归的背景知识之后,现在我们可以动手实现它了。尽管强大的深度学习框架可以减少大量重复性工作,但若过于依赖它提供的便利,会导致我们很难深入理解深度学习是如何工作的。
首先,导入本节中实验所需的包或模块,其中的 matplotlib 包可用于作图,且设置成嵌入显示。
import torch
from IPython import display
from matplotlib import pyplot as plt #matplotlib包可用于作图,用来显示生成的数据的二维图。
import numpy as np
import random
1 生成数据集
我们构造一个简单的人工训练数据集,它可以使我们能够直观比较学到的参数和真实的模型参数的区别。设训练数据集样本数为 1000, 输入个数(特征数)为 2 。 给定随机生成的批量样本特征 $ \boldsymbol{X} \in \mathbb{R}^{1000 \times 2} $ ,我们使用线性回归模型真实权重 $ \boldsymbol{w}=[2,-3.4] $ 和偏差 $ b=4.2$ , 以及一个随机噪声项 $\epsilon $ 来生成标签
$\boldsymbol{y}=\boldsymbol{X} \boldsymbol{w}+b+\epsilon$
其中噪声项 $\epsilon$ 服从均值为 0、标准差为 0.01 的正态分布。噪声代表了数据集中无意义的干扰。下面,让我们生成数据集。
feature_size = 2 example_count = 1000 true_w = [2, -3.4] true_b = 4.2 #生成特征,生成均值为0,方差为1 的特征矩阵 features = torch.tensor(np.random.normal(0, 1, (example_count, feature_size)), dtype=torch.float) #输出特征矩阵的维度 print("特征矩阵的维度=",list(features.shape)) #根据线性方程得出特征对应的labels labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b #print(labels) # 添加随机噪声 labels += torch.tensor(np.random.normal(0, 0.01, size=labels.size()), dtype=torch.float) #print(labels)
注意,features 的每一行是一个长度为 2 的向量,而 labels 的每一行是一个长度为1的向量(标量)。
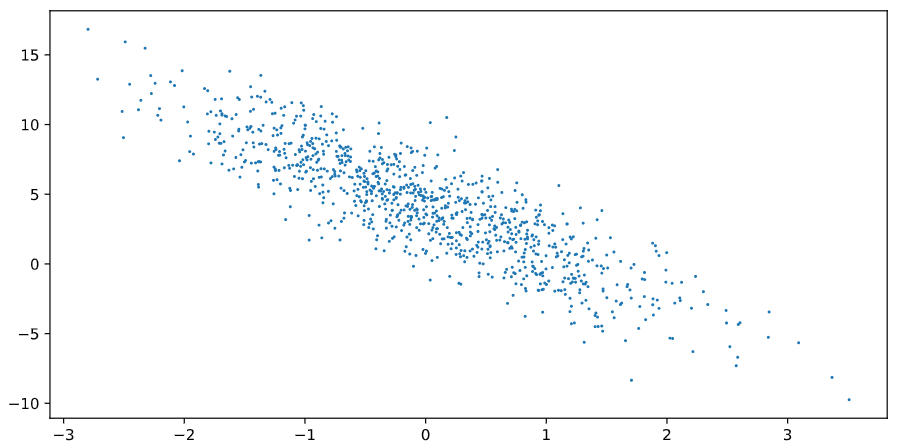
通过生成第二个特征features[:, 1]和标签 labels 的散点图,可以更直观地观察两者间的线性关系。
def use_svg_display(): # 用矢量图显示 display.set_matplotlib_formats('svg') def set_figsize(figsize=(10, 5)): use_svg_display() # 设置图的尺寸 plt.rcParams['figure.figsize'] = figsize #绘制散点图 set_figsize() plt.scatter(features[:, 1].numpy(), labels.numpy(), 1);
2 读取数据
在训练模型的时候,我们需要遍历数据集并不断读取小批量数据样本。这里我们定义一个函数:它每次返回 batch_size(批量大小)个随机样本的特征和标签。
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
# 样本的读取顺序是随机的
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
# 最后一次可能不足一个batch
j = torch.LongTensor(indices[i: min(i + batch_size, num_examples)])
yield features.index_select(0, j), labels.index_select(0, j)
让我们读取第一个小批量数据样本并打印。每个批量的特征形状为(10, 2),分别对应批量大小和输入个数;标签形状为批量大小
batch_sizes = 10
for xx, yy in data_iter(batch_sizes, features, labels):
print(xx)
print(yy)
break
输出
3 初始化模型参数
我们将权重初始化成均值为 0 、标准差为 0.01 的正态随机数,偏差则初始化成 0。
w = torch.tensor(np.random.normal(0, 0.01, (feature_size, 1)), dtype=torch.float32)
b = torch.zeros(1, dtype=torch.float32)
之后的模型训练中,需要对这些参数求梯度来迭代参数的值,因此我们需要创建它们的梯度。
w.requires_grad_(requires_grad=True)
b.requires_grad_(requires_grad=True)
4 定义模型
下面是线性回归的矢量计算表达式的实现。我们定义一元线性回归模型为 $\hat{y} = w_1 x_1 + w_2 x_2+b$
def linreg(X, w, b):
return torch.mm(X, w) + b
5 定义损失函数
定义损失函数为 $J=\frac{1}{2} \sum \limits _{i=1}^{N}\left(\hat{y}^{(i)}-f\left(x^{(i)}\right)\right)^{2}$
本实验使用平方损失来定义线性回归的损失函数。在实现中,我们需要把真实值 $𝑦$ 变形成 预测值 $\hat{y}$ 形状。以下的函数返回的结果和 $\hat{y}$ 的形状相同。
def squared_loss(y_hat, y):
return (y_hat - y.view(y_hat.size())) ** 2 / 2
6 定义优化算法
以下的sgd函数实现了小批量随机梯度下降算法。它通过不断迭代模型参数来优化损失函数。这里自动求梯度模块计算得来的梯度是一个批量样本的梯度和。我们将它除以批量大小来得到平均值。
def sgd(params, lr, batch_size):
for param in params:
param.data -= lr * param.grad / batch_size # 注意这里更改param时用的param.data
7 训练模型
在训练中,我们将多次迭代模型参数。在每次迭代中,我们根据当前读取的小批量数据样本(特征X和标签y),通过调用反向函数 backward 计算小批量随机梯度,并调用优化算法sgd迭代模型参数。由于我们之前设批量大小 batch_size 为10,每个小批量的损失l的形状为 (10, 1) 。由于变量l并不是一个标量,运行 l.backward() 将对l中元素求和得到新的变量,再求该变量有关模型参数的梯度。
在一个迭代周期(epoch)中,我们将完整遍历一遍data_iter函数,并对训练数据集中所有样本都使用一次(假设样本数能够被批量大小整除)。这里的迭代周期个数num_epochs和学习率lr都是超参数,分别设3和0.03。在实践中,大多超参数都需要通过反复试错来不断调节。虽然迭代周期数设得越大模型可能越有效,但是训练时间可能过长。我们会在后面“优化算法”一章中详细介绍学习率对模型的影响。
lr = 0.03
num_epochs = 3
batch_size = 10
net = linreg
loss = squared_loss
for epoch in range(num_epochs): # 训练模型一共需要num_epochs个迭代周期
# 在每一个迭代周期中,会使用训练数据集中所有样本一次
for X, y in data_iter(batch_size, features, labels): # x和y分别是小批量样本的特征和标签
l = loss(net(X, w, b), y).sum() # l是有关小批量X和y的损失
l.backward() # 小批量的损失对模型参数求梯度
sgd([w, b], lr, batch_size) # 使用小批量随机梯度下降迭代模型参数
w.grad.data.zero_() # 梯度清零
b.grad.data.zero_()
train_l = loss(net(features, w, b), labels)
print('epoch %d, loss %f' % (epoch + 1, train_l.mean().item()))
输出:
epoch 1, loss 0.037224
epoch 2, loss 0.000135
epoch 3, loss 0.000052
因上求缘,果上努力~~~~ 作者:别关注我了,私信我吧,转载请注明原文链接:https://www.cnblogs.com/BlairGrowing/p/15061912.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号