小明能把自己拉起来吗?——动滑轮自举问题完整解析
问题描述
小明站在一个立方体上,整个滑轮装置连接在立方体上方,绳子穿过滑轮,滑轮左侧绳子固定在天花板,右侧绳子由小明手持。
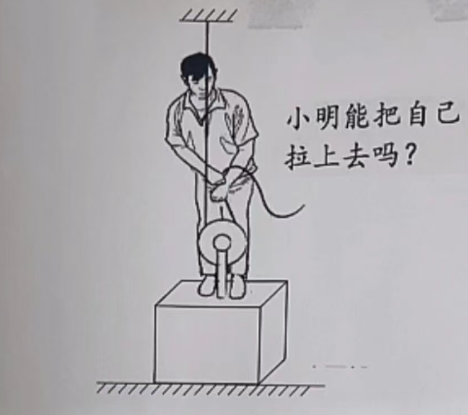
核心问题:小明能否通过拉绳子把自己和立方体一起向上提升?
0、初步分析
先说结论,只要小明能使出大于【自己+立方体】重量的力,小明就可以把自己拉起来!
- 当小明的手完全不发力,地面对立方体的支持力 F 等于小明和立方体的总重力 G (F=G)。此时,滑轮左侧一端的天花板和右侧一端的手都不提供任何拉力
- 当小明开始手握绳子向上拉,天花板一端绳子明显绷紧,此时左侧天花板提供了一点向上的拉力 T,此时 F + T = G。
- 当小明拉力加大,T 逐渐加大,达到 G 时,地面的支持力 F 减小到 0, 此时立方体和地面只是接触,但是以及 “悬浮” 起来了,此时 T=G
- 当向上的拉力继续变大,变成 T > G,那么整体合力向上,于是有了向上移动的加速度,小明也就把自己和立方体一起抬起来了
是不是觉得很有些反直觉?没关系,看完以下的分析,定能让你 “拨云见日,茅塞顿开” !
一、静态平衡分析
为了更好地分析这个过程,我们先进行一下立方体刚刚 “悬浮” 起来那一刻,系统局部,和 系统整体 的受力分析
符号定义
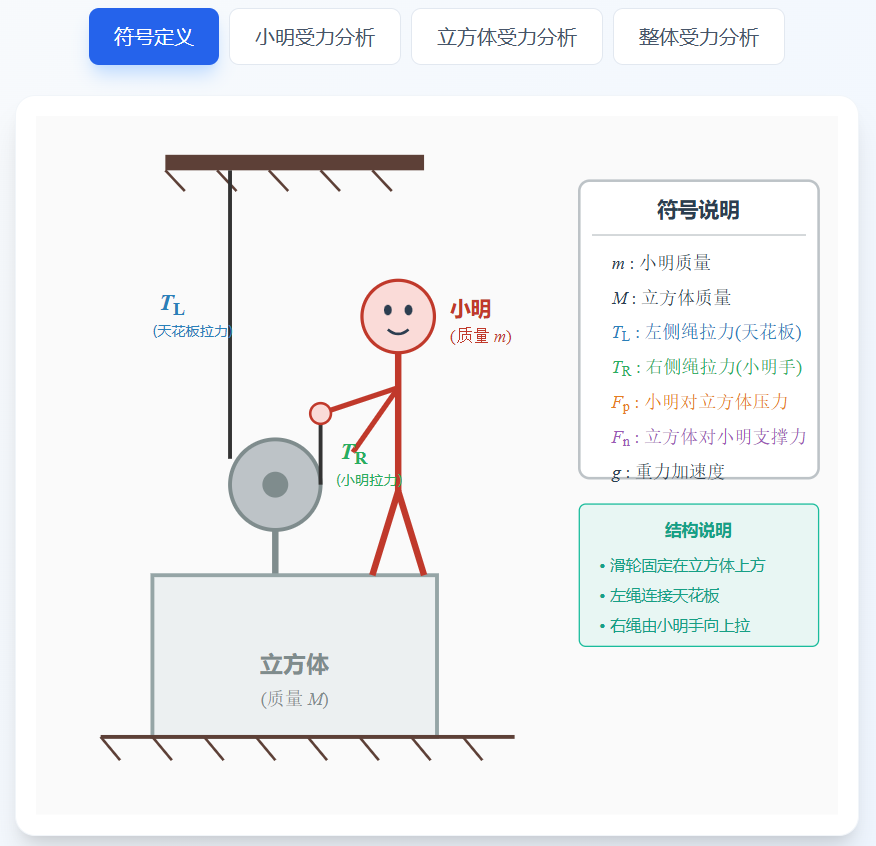
- 小明质量:m
- 立方体质量:M
- 左侧绳子拉力(天花板提供):TL
- 右侧绳子拉力(小明手拉):TR
- 小明对立方体的压力:Fp
- 立方体对小明的支撑力:Fn
- 重力加速度:g
1. 对小明的受力分析
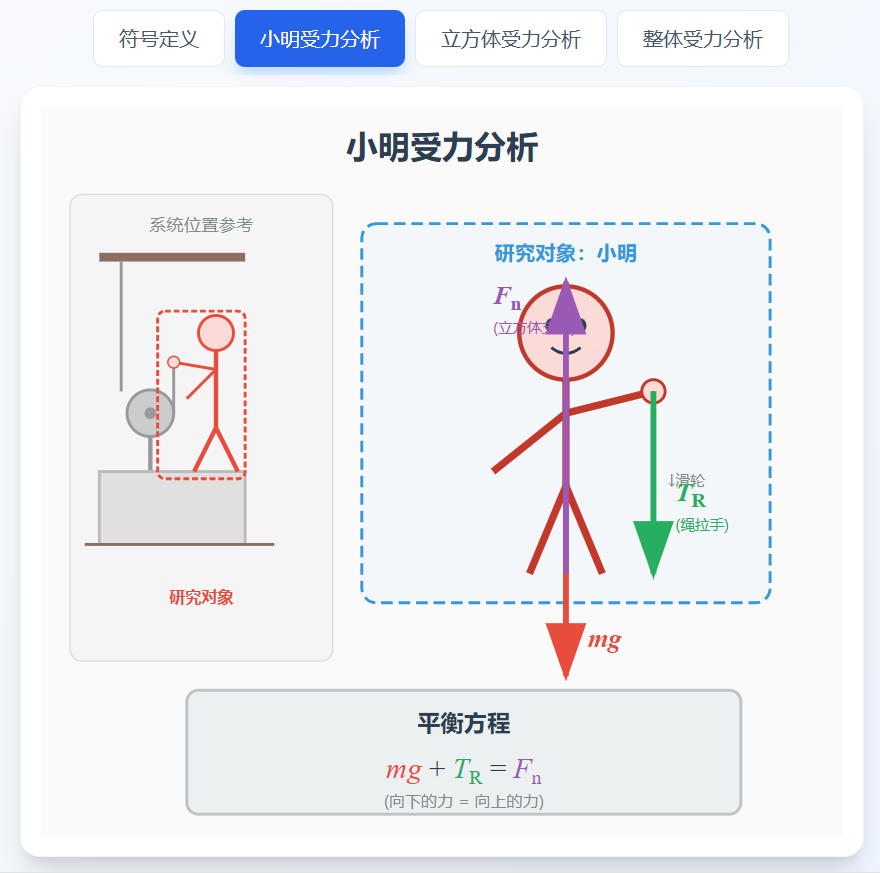
向下的力:
- 重力:mg
- 绳子向下拉力:TR(拉力是相互的)
向上的力:
- 立方体对小明的支撑力:Fn
平衡方程:
[式子1] mg + TR = Fn
2. 对立方体的受力分析
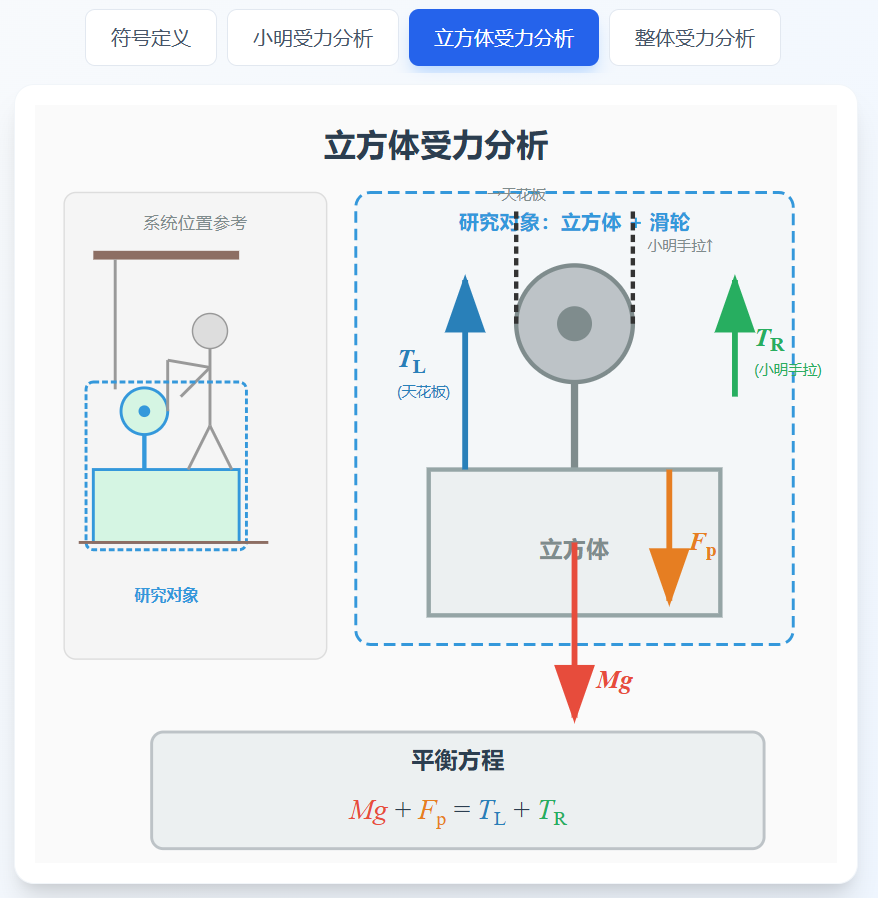
向下的力:
- 立方体重力:Mg
- 小明的压力:Fp(根据牛顿第三定律,Fp = Fn)
向上的力:
- 滑轮两侧绳子的拉力:TL + TR
平衡方程:
[式子2] Mg + Fp = TL + TR
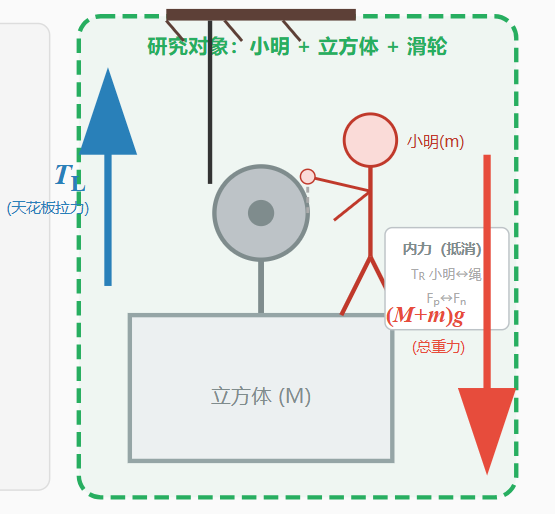
3. 对整体(小明+立方体)的受力分析
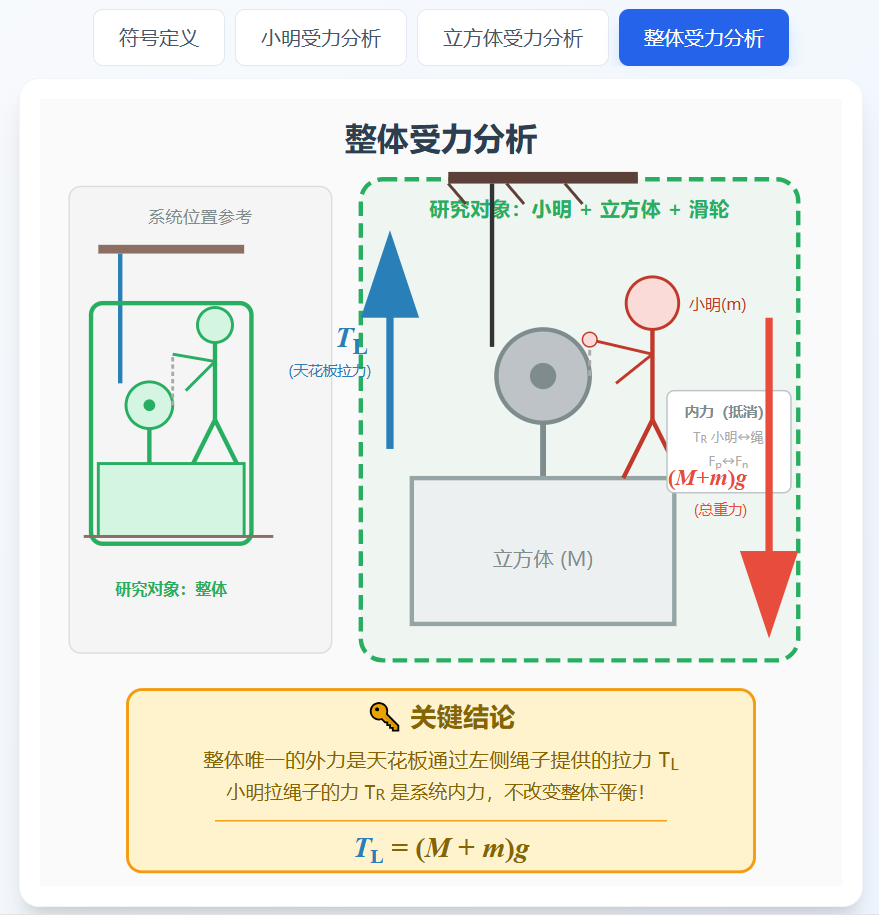
向下的力:
- 总重力:(M + m)g
向上的力:
- 仅有天花板提供的拉力:TL
重点来了:
如果从整体看,唯一的外力是 TL,那么:
[式子3] TL = (M + m)g
这意味着天花板承担全部重量,小明拉绳子只是整个系统的内力,不像我们之前对 常见的动滑轮系统的认识 那样,这里滑轮实际上永远无法分担天花板提升物体的负担。
二、动滑轮特点与力平衡分析
理想滑轮的特性
对于理想滑轮(无质量、无摩擦、可自由转动):
TL = TR
静态平衡时的真实情况
当系统静止时,TL = TR,结合 立方体 受力方程:
[式子2] Mg + Fp = TL + TR
以及 小明 受力方程
[式子1] mg + TR = Fn
并且有,小明对立方体的压力(Fp) = 立方体对小明的支撑力(Fn)
Fp = Fn
可推算如下:
[式子4] Mg + Fp = TL + TR = 2TL
由于 Fp = Fn = mg + TR = mg + TL
将 Fp = mg + TL 代入 [式子4] 得:
Mg + mg + TL = 2TL
移项得:
(M + m)g = 2TL - TL = TL
解得:
TL = (M + m)g
重要结论:天花板承担了全部重量!
这与整体分析的结果一致。
三、提升过程的分析
初始状态:立方体刚刚 “悬浮” 起来那一刻
- TL = TR = (M + m)g
- 系统静止平衡,小明提供的拉力 TR,刚刚好等于 [立方体+小明] 的重力
过程:小明加大发力
第1阶段:用力拉绳(TR 增大)
- 小明肌肉继续加大发力 TR ↑,手臂在右侧向上拉绳子
- TR 增大↑ > (M + m)g
第2阶段:系统上升
- 重点来了,此时 左侧连接天花板提供的拉力 TL 由于反作用力,也会跟着加大↑
这就类似与做引体向上时,肌肉收缩 → 拉动骨骼 → 手掌用力抓紧横杆向下拉 → 横杆被动产生向上的反作用力 → 推动身体上升
- 此时对于 [立方体+小明] 整体: TL > (M + m)g,整个系统获得向上的加速度
- 滑轮上升,带动立方体和小明一起上升
- 重力势能增加
第3阶段:重新平衡
- 小明身体由微微弯腰到挺直后,到达肌肉活动极限
- TR 逐渐减小,回到 TR = TL = (M + m)g
- 系统重新静止在更高的位置
能量转换过程
小明肌肉化学能
↓
小明对绳子做功
↓
系统获得动能(向上运动)
↓
系统重力势能增加
关键: 小明通过类似 "挺直腰板" 的动作,肌肉做功转化为系统的重力势能增加(整个过程类似引体向上)。
四、为什么能够实现自举?
核心机制
-
动态过程的力不平衡
- 滑轮右侧的 TR 加大,带动了左侧 TL 的加大
- TL > (M + m)g 时,系统向上加速
- 小明可以通过肌肉做功创造这种不平衡
-
能量来源
- 不是"无中生有"
- 能量来自小明的肌肉(化学能)
五、常见误解澄清
误解1:天花板拉力 = 总重力 / 2
澄清: 如果绳子右侧的绳子也是由 [立方体+小明] 系统之外的力提供,那么,静态平衡时 TL = TR,天花板确实只承担一半重量。但是这里系统整体唯一的向上的力只由天花板提供。
误解2:小明拉绳是内力,无法改变系统运动
澄清: 静态分析是对的,但动态过程中,小明可以通过做功让 TL > (M + m)g,系统获得总体向上的合力。
误解3:这违反了能量守恒
澄清: 完全不违反。能量来自小明的肌肉化学能,转化为重力势能。
六、结论
只要小明能使出大于【自己+立方体】重量的力,小明就可以把自己拉起来!
| 版权声明 本博客所有的原创文章,作者皆保留版权。转载必须包含本声明,保持本文完整,并以超链接形式注明作者 BensonLaur 和本文原始地址: |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号