

Acorn: Adaptive Coordinate Networks for Neural Scene Representation
Acorn: Adaptive Coordinate Networks for Neural Scene Representation
动机

信号存在大量冗余,因此需要根据内容动态分配区域,即对于细节更丰富的区域分配更多的块。
方法
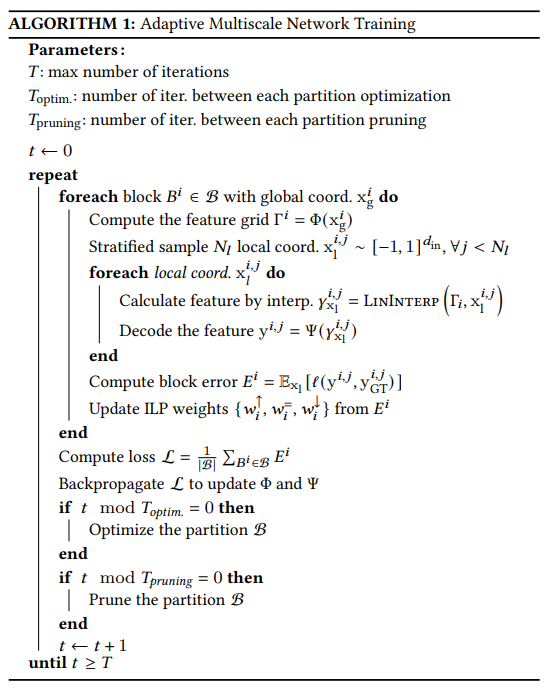
算法流程
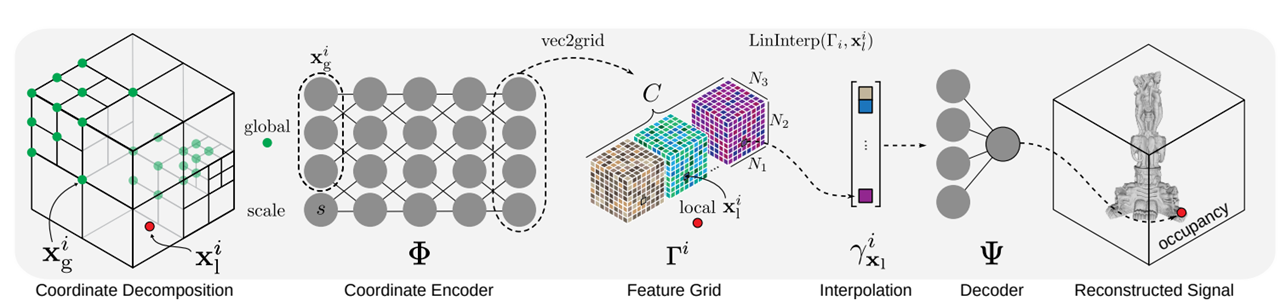
- 分块
- 将块坐标(全局坐标)映射为特征网格(Feature Grid)。
- 根据点在块的内部坐标(局部坐标)从特征网格中插值获得特征。
优化分块
整数规划
假设已经有一个分块的决策,对于每个块,有三种动作:融合、不变、细分:
一个区域是否融合,取决于其所有兄弟块\(\mathbf{S}(i)\)的融合标记是否为1:
每个块定义一组权重:
优化目标为最小化\(\sum_i{\mathbf{w}_i^T\mathbf{I}_i}\)
限制条件为三种决策互斥且总数有限:
其中,\(N_S\)表示执行细分操作时一个块的子块个数;\(N_B\)表示最大总块数。
块权重计算
权重的计算根据网络回归的误差\(E^i\)计算。\(w^{=}_i\)直接按照体积/面积计算\(w^{=}_i=\mathrm{Vol}_i\cdot E^i\)
\(w^{\uparrow}_i\)则考虑父节点\(\mathcal{P}(i)\)的权重\(w^{=}_{\mathcal{P}(i)}\):
其中,若设置\(\alpha>0\)则相当于假设块融合的误差大于\(N_S\)倍的\(w^{=}_i\)。
类似的,\(w^{\uparrow}_i\)则考虑子节点\(\mathcal{C}(i)\)的权重:
其中,若设置\(\beta>0\)则相当于假设块融合的误差小于\(\frac{1}{N_S}\)倍的\(w^{=}_i\)。
训练流程
剪枝
存在一些区域的内容是非常一致的,例如空白、单色。为了减少在这些情况下的操作,这些区域不再考虑在块划分中,即不可细分并在一个表中储存其值。参照对块总数的限制条件,这些被固定的块相当于释放了更多的细分空间给其他块,从而导致更好的划分结果。实际实践中,根据以下原则判断是否剪枝:
- 低回归误差
- 低块内方差
实验
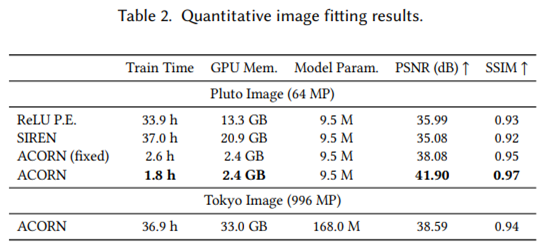
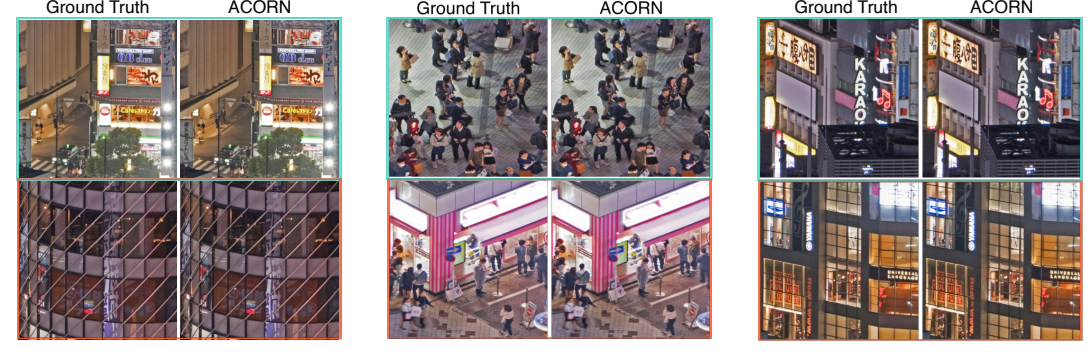
能够显著降低训练时间,同时也能提升回归精度。
总结
通过分块来实现动态的参数量分配,这也是常见的一种优化方式。本文通过在训练过程中执行整数规划动态调整块的划分,即决定需要参与训练的全局坐标集合。这一过程相当于是在调整每一轮训练过程中的坐标采样策略。
由于本人并没有复现过本文工作,所以发散出了一个担忧:在网络输出波动比较大的情况下,每轮的划分情况也可能会剧烈变化,那么是否也会因此导致网络收敛难度变大,又再次导致每轮网络输出变化较大?当然,理想情况下,网络能在多轮训练后逐渐减小拟合误差,也能够保证训练过程顺利进行。但依然比较担忧前期的一些训练是否需要大量工程经验进行调优。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号