
博客阅读:DeepLab 系列总结
本文是基于一篇博客的学习笔记
博客原文:https://blog.csdn.net/fanxuelian/article/details/85145558
一、DeepLab 系列
(一)DeepLab V1
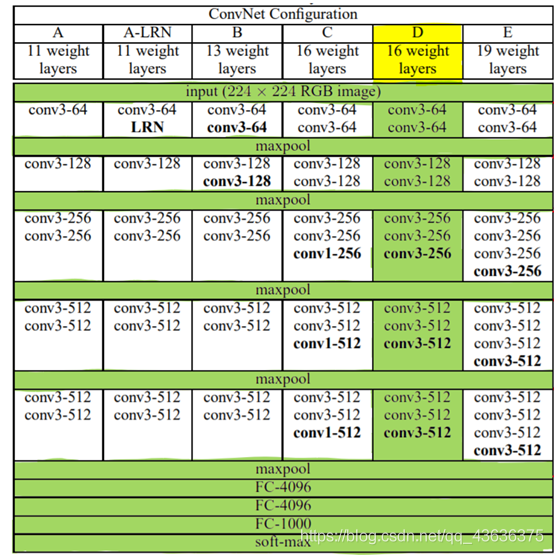
1. 基础:VGG16
参考:https://blog.csdn.net/qq_43636375/article/details/114917772
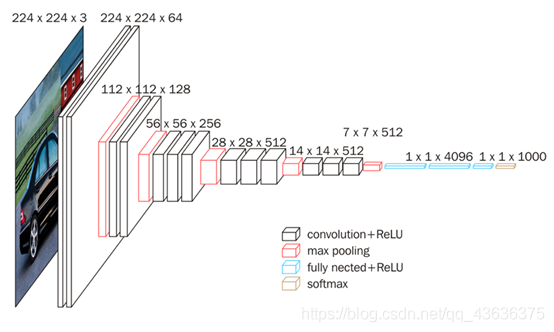
输入图像大小:224x224x3
VGG16的卷积层和池化层可以划分为5个Block
- Block1:
conv3-64 -> conv3-64 -> maxpool- in_size=(224,224,3)
- 2个卷积层,kernel_size=3,out_channels=64
- 1个最大池化层,kernel_size=2
- out_size=(112,112,64)
- Block2:
conv3-128 -> conv3-128 -> maxpool- 2个卷积层,kernel_size=3,out_channels=128
- 1个最大池化层,kernel_size=2
- out_size=(56,56,128)
- Block3:
conv3-256 -> conv3-256 -> conv3-256 -> maxpool- 3个卷积层,kernel_size=3,out_channels=256
- 1个最大池化层,kernel_size=2
- out_size=(28,28,256)
- Block4:
conv3-512 -> conv3-512 -> conv3-512 -> maxpool- 3个卷积层,kernel_size=3,out_channels=512
- 1个最大池化层,kernel_size=2
- out_size=(14,14,512)
- Block5:
conv3-512 -> conv3-512 -> conv3-512 -> maxpool- 3个卷积层,kernel_size=3,out_channels=512
- 1个最大池化层,kernel_size=2
- out_size=(7,7,512)
VGG16是多个卷积层和池化层交替组成的,最后做以多次全连接,这样的结构类似LeNet和AlexNet,前半部分利用了卷积层去观察全局的特征,后半部分利用线性层进行分类输出,抛弃了位置特征
2. 改进
参考:
https://zhuanlan.zhihu.com/p/104562658
https://blog.csdn.net/u011984148/article/details/109759574
-
去掉了最后的全连接层:即改为 FCN 网络,语义分割全卷积网络的大势所趋
-
去掉了最后两个池化层:
- 池化层的作用:缩小特征层的尺寸,快速扩大感受野。(扩大感受野,可以利用更多的上下文信息进行分析)
- 去除原因:
- 传统的深度卷积网络 DCNN 需要完成的任务是分类,需要给出的结果是图片是什么,而并不关心图片中东西的位置,这与语义分割,这一关注识别的像素级别的具体位置的需求背道而驰
- 在 DCNN 中,要求网络具有平移不变性,这就是卷积和池化的特征之一。pooling 的实际上是一个模糊位置的过程,增强了平移不变性这一特征,而这反而不利于语义分割,语义分割需要更精确的信息
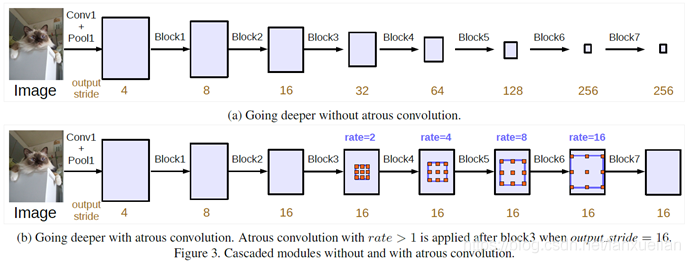
- 解决感受野不足的问题:在去掉 pooling 层后,感受野会随之下降,解决方法是引入空洞卷积(Atrous Convolution),这样可以在不增加计算量的情况下扩大感受野。而且更进一步,相比于先pooling后再卷积,使用空洞卷积可以让特征更密(因为pooling减少了分辨率,这使得空洞卷积和普通卷积的位置不再是一一对应的了)
- 引入条件随机场CRF提高分类精度:
- 引入目的:在已有的语义分割网络如 U-net 中都存在形成预测像素的“孤岛”的微小不连续分类的问题,CRF 的引入目的在于解决这些误差的生成
- 原理:CRF 的方法可以理解为某种程度上的马尔可夫(个人理解),如果体现在 NLP 领域即为通过上下文单词更精确的识别当前单词的词性,也就是把当前对象周围信息纳入对该对象的标签预测中去
- 效果:在语义分割中,目标是输出每个像素都被打上分类标签的分割图,那么 CRF 的效果则为,使具有相似位置和颜色特征的两个像素被打上相同标签的概率更大,被分割的可能性更小,一定程度上避免了“孤岛”的产生
- 个人理解,条件随机场在本质上是一个输入和输出尺寸相同的全连接层,在全局上考虑了各个像素之间的位置关系
3. 总处理流程
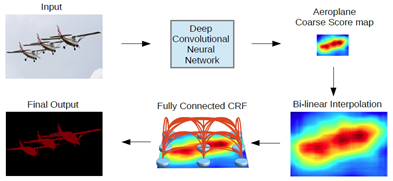
- 输入图像
- 经历基于 VGG 改造的 DCNN 网络得到粗糙的 score map(按我理解叫 heat map)
- 使用双线性采样进行上采样,提高 score map 的分辨率
- 使用 CRF 进行优化,去除“孤岛”
- 输出分割图
(二)DeepLab V2
1. 基础:ResNet-101
参考:https://blog.csdn.net/qq_45649076/article/details/120494328
ResNet 可以理解为是 U-net 的叠加部分或者 FCN 中的 skip 相加部分(有异曲同工之处),都是将之前层的数据叠加到新的层上,这样可以兼顾浅层卷积的分辨率信息和深层卷积的位置信息,对于语义分割是有益的
基本模块(两种不同的residual):BasicBlock 和 BottleNeck
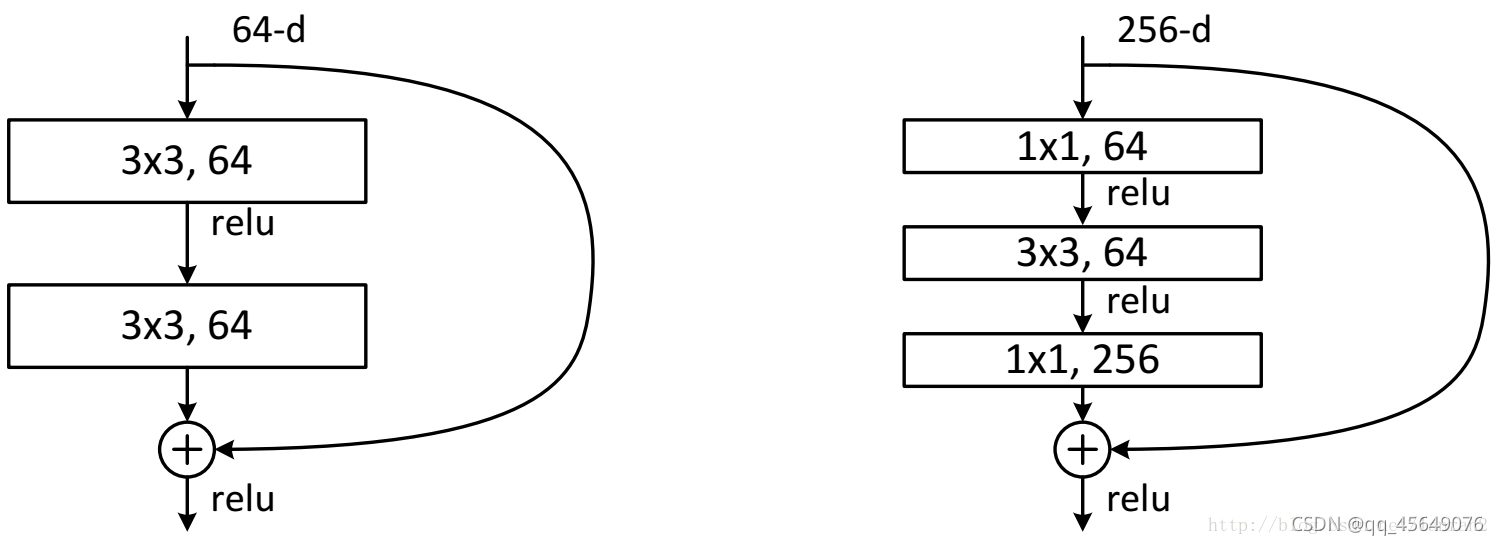
- 双层的残差结构 BasicBlock 很容易理解
- 三层的残差结构 BottleNeck :先用1x1卷积降通道
channel=256 -> 64,再进行3x3卷积,然后用1x1卷积升通道channel=64 -> 256,这样以来模块的输入尺寸和卷积输出尺寸一致,利用 short cut 相加得到模块输出。这样一降一升通道数的好处在于可以减少训练参数,训练速度更快CNN参数个数 = 卷积核尺寸 × 卷积核深度 × 卷积核组数 = 卷积核尺寸 × 输入特征矩阵深度 × 输出特征矩阵深度
- 在实际应用的网络中最好采用 BottleNeck 模块为基本单元
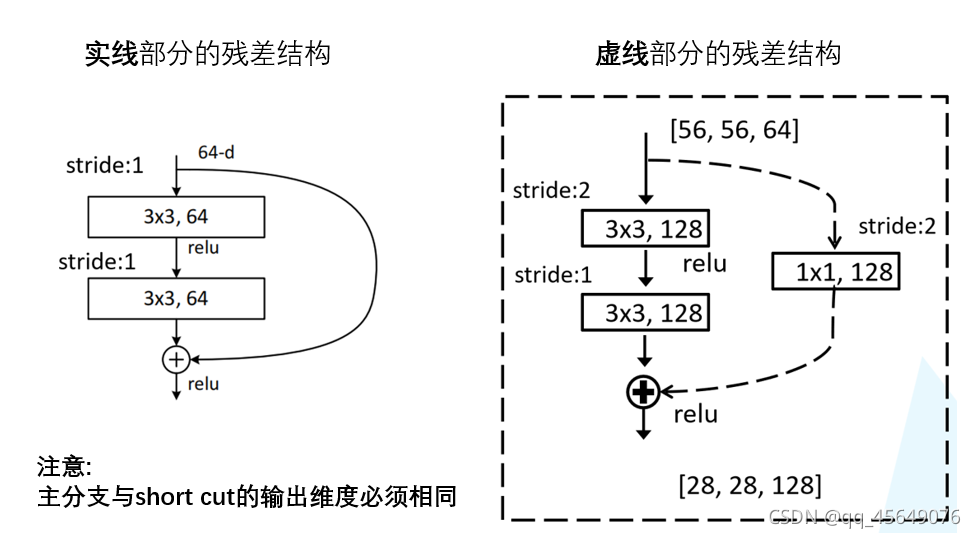
- 实际使用的 ResNet 网络中,有时需要让通过 BottleNeck 模块后通道数下降,这时就需要对 short cut 进行1x1卷积的降通道处理
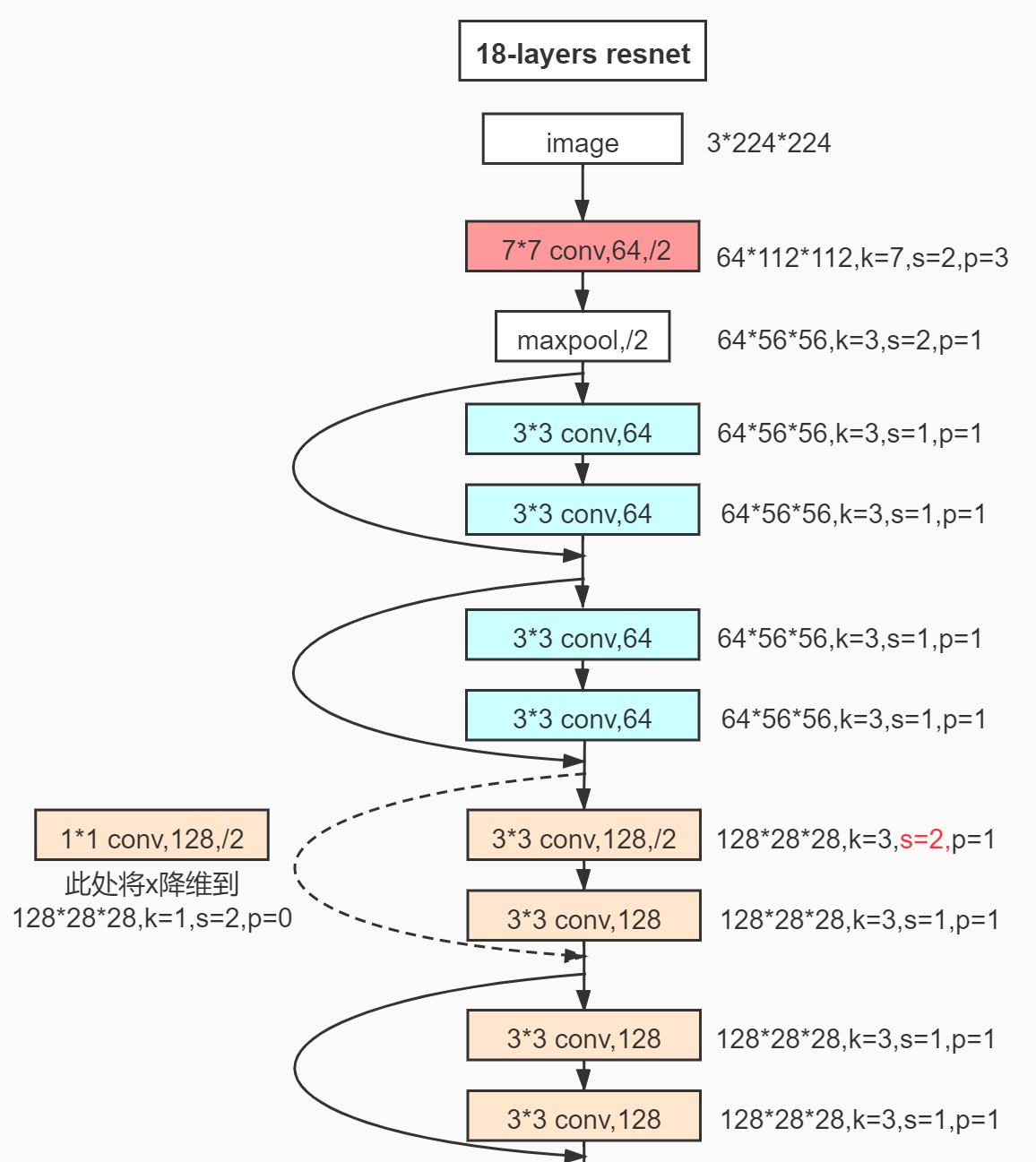
以18层的 ResNet 为例:
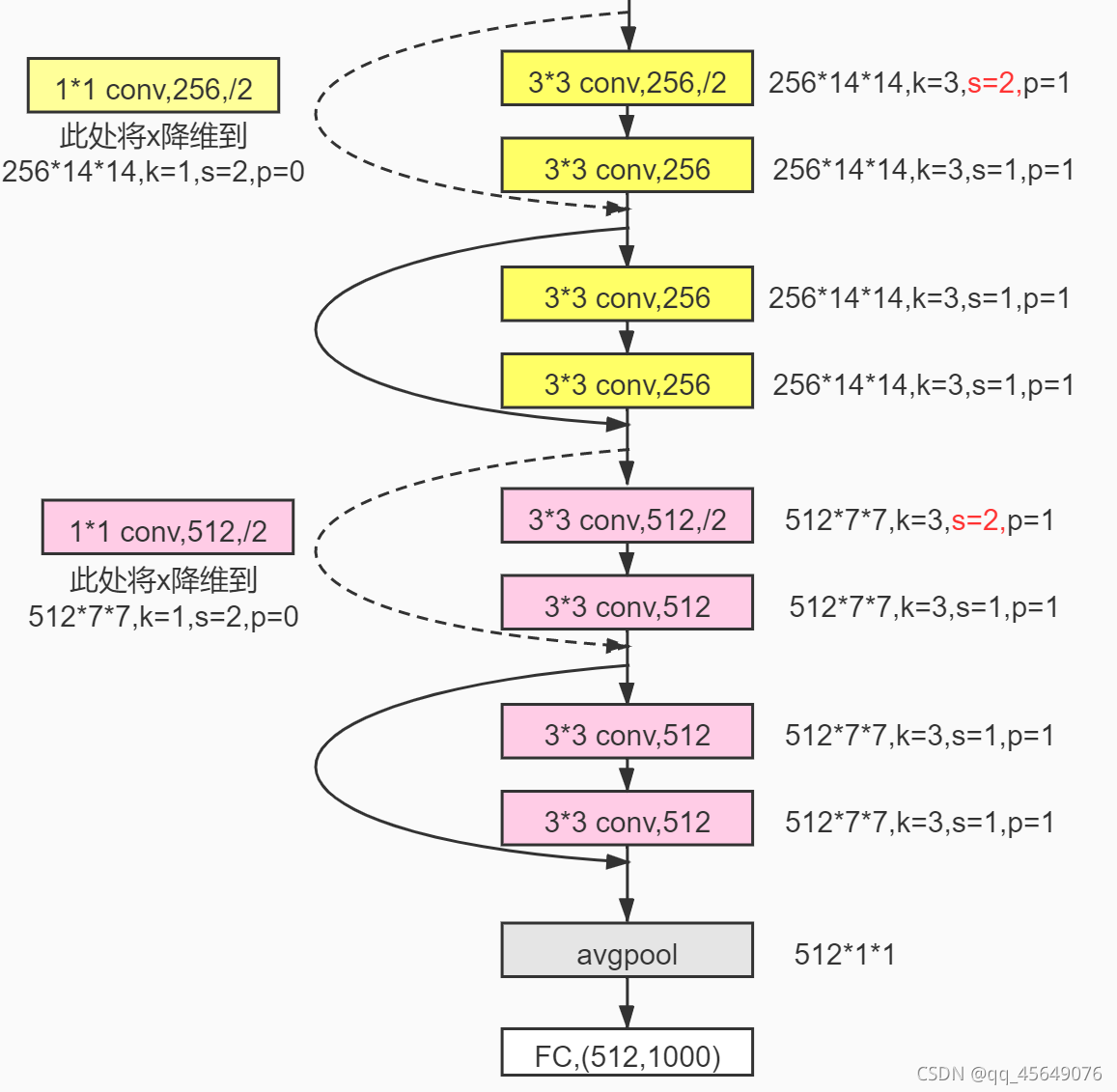
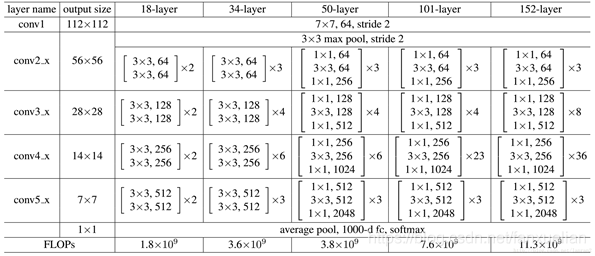
其他类型的 ResNet:(V2的基础为其中的101-layer)
2. 改进:空洞空间金字塔池化 ASPP
参考:https://blog.csdn.net/qq_41731861/article/details/122560247
空洞卷积存在的劣势:
- 局部信息丢失:由于空洞卷积的计算方式类似于棋盘格式,某一层得到的卷积结果,来自上一层的独立的集合,没有相互依赖,卷积结果之间没有相关性
- 远距离获取的信息没有相关性:由于空洞卷积稀疏的采样输入信号,使得远距离卷积得到的信息之间没有相关性
class ASPP(nn.Module):
def __init__(self, in_channel=512, depth=256):
super(ASPP,self).__init__()
self.mean = nn.AdaptiveAvgPool2d((1, 1)) #(1,1)means ouput_dim
self.conv = nn.Conv2d(in_channel, depth, 1, 1)
self.atrous_block1 = nn.Conv2d(in_channel, depth, 1, 1)
self.atrous_block6 = nn.Conv2d(in_channel, depth, 3, 1, padding=6, dilation=6)
self.atrous_block12 = nn.Conv2d(in_channel, depth, 3, 1, padding=12, dilation=12)
self.atrous_block18 = nn.Conv2d(in_channel, depth, 3, 1, padding=18, dilation=18)
self.conv_1x1_output = nn.Conv2d(depth * 5, depth, 1, 1)
def forward(self, x):
size = x.shape[2:]
image_features = self.mean(x)
image_features = self.conv(image_features)
image_features = F.upsample(image_features, size=size, mode='bilinear')
atrous_block1 = self.atrous_block1(x)
atrous_block6 = self.atrous_block6(x)
atrous_block12 = self.atrous_block12(x)
atrous_block18 = self.atrous_block18(x)
net = self.conv_1x1_output(torch.cat([image_features,
atrous_block1,
atrous_block6,
atrous_block12,
atrous_block18],
dim=1))
return net
结合 ASPP 的代码来看:
- ASPP 层先对输入做一系列不同 padding 和 dilation 的空洞卷积,这些卷积通过调整这两个参数以满足输出通道数和尺寸保持一致
- 让这些空洞卷积的输出通过 concat 相加,得到 ASPP 层的输出
ASPP 层解决了空洞卷积信息丢失的劣势,也同时增大了感受野,从不同的尺度上提取特征
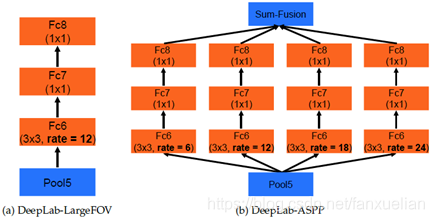
将 ASPP 融合入 ResNet-101:
即让卷积6分裂为一系列的空洞卷积,分别进行后续的卷积操作,然后将所有的输出 concat 在一起
(三)DeepLab V3
1. 基础:DeepLab V2 ResNet-101
2. 改进
- 舍弃 CRF:我觉得有必要研究一下
因为分类结果精度已经提高到不需要CRF了(也可能是CRF不起作用了,谁知道呢)
- 改进 ASPP 方案一:拓展网络的宽度
- 在空洞卷积之后使用 batch normalization:待定
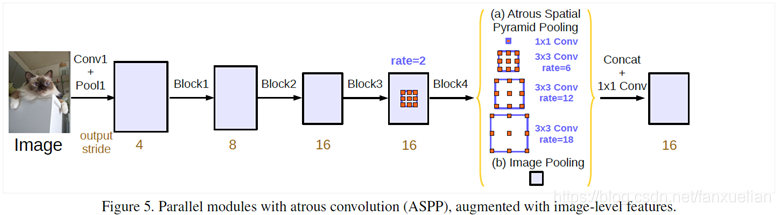
- 增加了1x1卷积分支和 image pooling 分支:
- 目的:解决使用空洞卷积带来的问题,即随着rate的增大,一次空洞卷积覆盖到的有效像素(特征层本身的像素,相应的补零像素为非有效像素)会逐渐减小到1也就是说太大的 padding 和 dilation 带来了非中心采样点位置过于偏僻,要么太远,要么延申到 padding 补0区域,这些像素采样是没有意义的。这就与我们扩展感受野,获取更大范围的特征的初衷相背离了
- 措施:
- 使用1x1的卷积:即当rate增大以后3x3卷积的退化形式,替代3x3卷积,减少参数个数
- 增加image pooling:即全局池化,来补充全局特征。具体做法是对每一个通道的像素取平均,之后再上采样到原来的分辨率
- 改进 ASPP 方案二:加深空洞卷积的深度
(四)DeepLab V3+
1. 基础:Xception
参考:https://www.jianshu.com/p/9a0ba830af37?utm_source=oschina-app
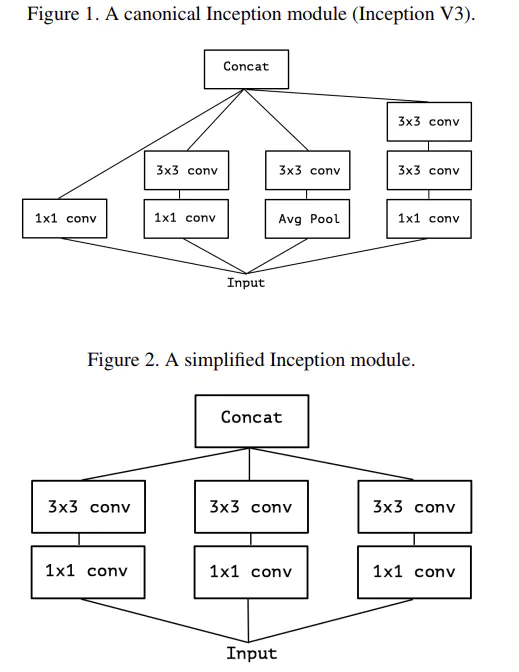
Xception 是由 Inception v3 直接演变而来。其中引入了 Residual learning 的结构(Residual learning 在 CNN 模型中的使用可带来收敛速度的加快)
其中 Inception v3 可以如图表示,这样的网络与 DeepLab V2 的 ASPP 先分后合的思想有异曲同工之处
在此基础上
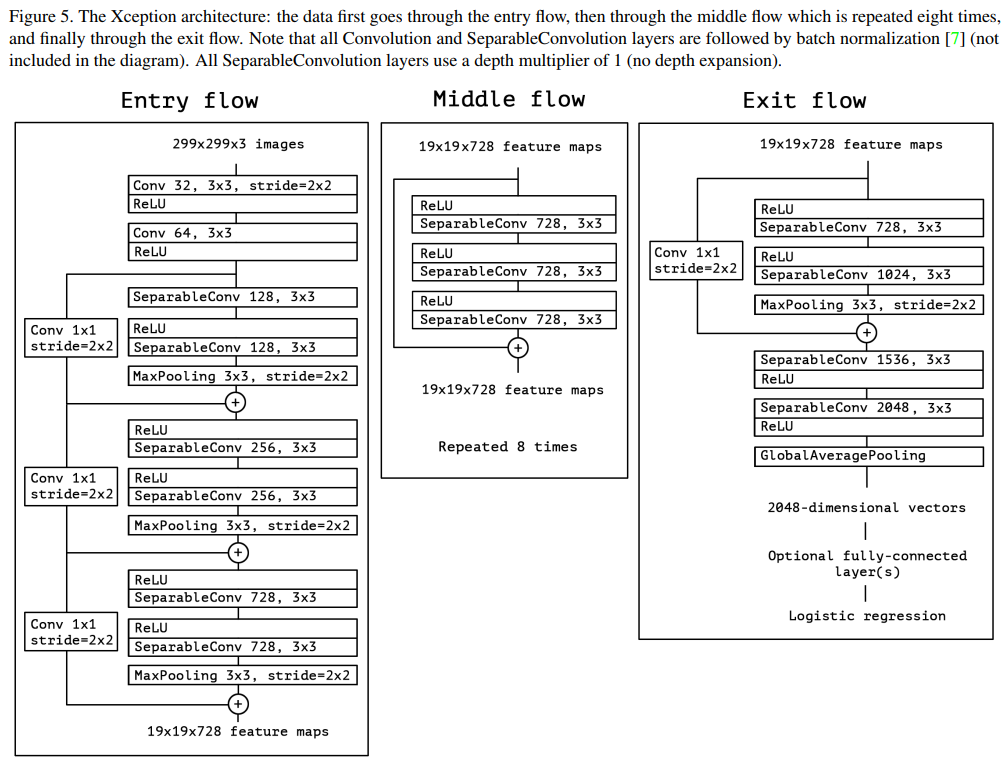
Xception 引入了 Entry/Middle/Exit 三个 flow ,每个 flow 内部使用不同的重复模块
- 最核心的是中间不断分析、过滤特征的 Middel flow。
- Entry flow 主要是用来不断下采样,减小空间维度
- Middel flow 是不断学习关联关系,优化特征
- Exit flow 是汇总、整理特征,用于交由FC(fully connected layer)来进行表达
2. 改进
-
使用更深的网络
-
将所有的卷积层和池化层用深度可分离卷积(depthwise separable convolution / sep conv)进行替代
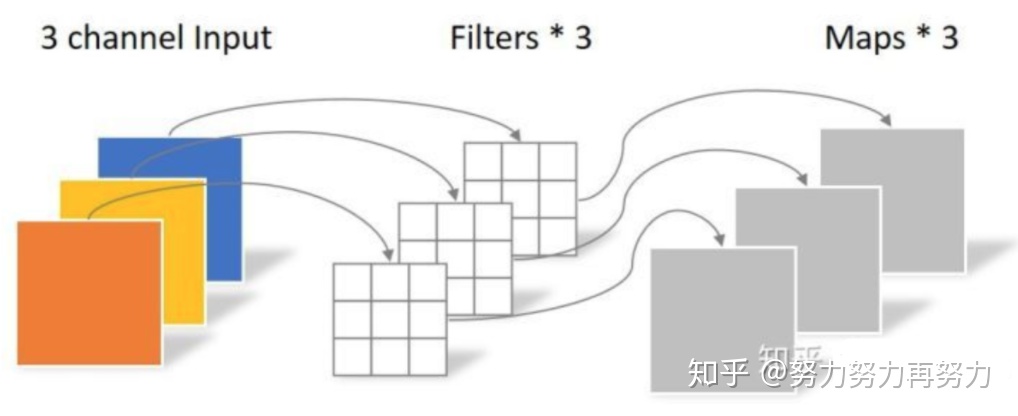
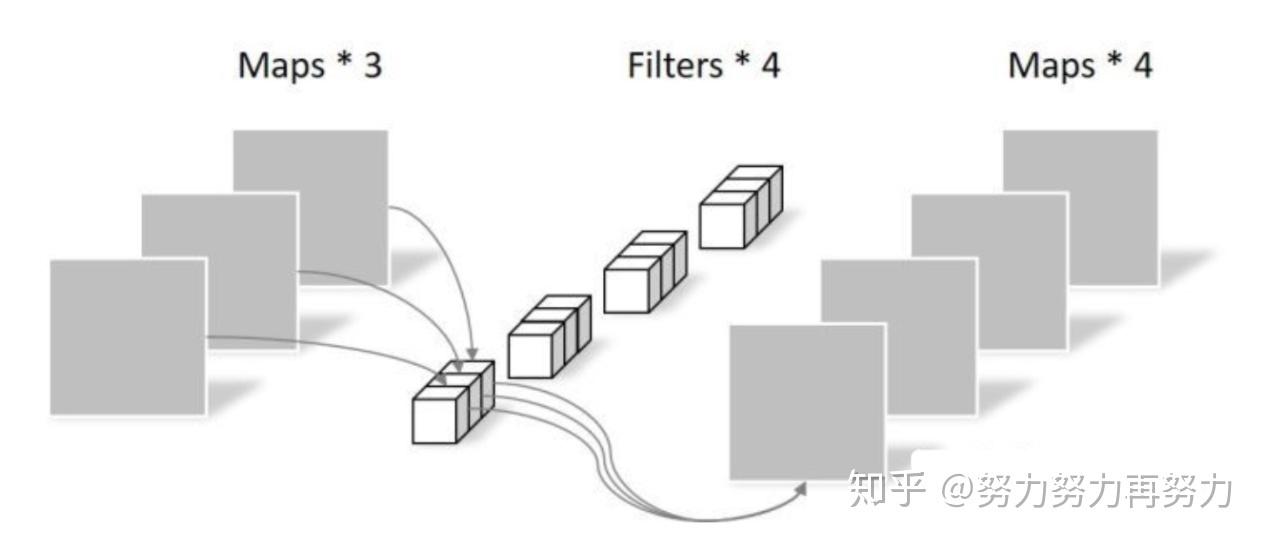
- 深度可分离卷积主要分为逐通道卷积和逐点卷积两个过程
- 逐通道卷积(Depthwise Convolution):每个 channel 使用一个一维3x3卷积核,卷积生成一个单维 map 输出
![]()
- 逐点卷积(Pointwise Convolution):所有 map 构建一个多维输入,使用多维的1x1卷积核进行普通卷积,输出指定通道数的多维张量
![]()
- 优势:从理论上讲可以降低计算量,可以在运算量不增加的情况下把卷积网络做的更深,但是这样的优势仅仅局限在理论上,因为这样的卷积形式不能有效的利用硬件,所以实际上计算量虽小,效率并没有明显提升,个人见解,这样的意义不大
-
在每一次3x3的 sep conv 之后使用 Batch Normalization 和 ReLU
3. 网络架构总体改良:引入了 Encoder-Deconder 结构
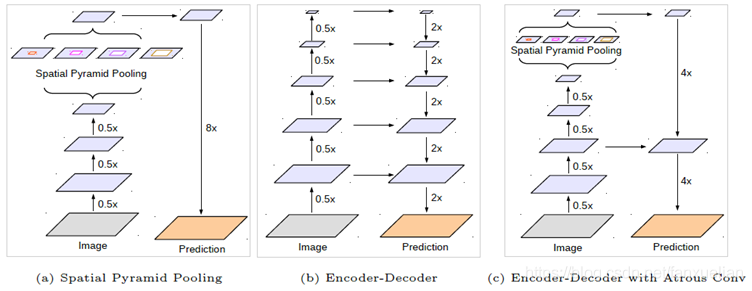
之前的三个版本中,重点使用了 ASPP 的方法,总体上结构是一步步卷积池化,进行下采样,然后再在最终得到的 feature map 上进行上采样,这样的在一个方向复杂而另一个方向简单的方法有些粗糙了
V3+ 版本在此基础上要引入类似 U-net 的 Encoder-Deconder 结构,即单方面复杂化了在 feature map 上进行上采样的过程,这里的具体操作方式与 FCN 的 skip 方法基本上一模一样,即上采样的到一定的分辨率,然后与相同尺寸的收缩路径中的某一层的输出进行 concat,然后继续如此上采样,直到分辨率达到端数据的要求
二、对于 DeepLab 系列的理解与总结
首先必须指出 DeepLab 网络的工作的端到端输入输出,输入图像,输出与图像在像素级别对应的等大小分割图,这就使得 DeepLab 必定是一个先下采样提炼特征,再上采样恢复分辨率的过程,从这个宏观的尺寸变化上,我认为是非常类似 Encoder-Deconder 结构的。这个意义上来看,不妨借用 U-net 的说法,称两个过程为收缩路径和扩张路径
- V1 版本的总体结构是朴素的 VGG 网络,在收缩路径上引入了扩大感受野的方式——空洞卷积,在扩张路径上引入了 CRF 技术来优化“孤岛”的问题
- V2 版本有两个重大改进,一个是引入了类似 skip 的 ResNet 残差结构,来更好的匹配位置信息和图像内容;另一个是引入了 ASPP 的先分后合的空洞卷积模型,来建立卷积结果之间的相关性
- V3 版本在 V2 版本的基础上改进了 ASPP,选择性拓展了网络的宽度或深度,并且舍去了 CRF 技术
- V3+ 版本在收缩路径上改进了卷积方法,引入了深度可分离卷积来减少计算量,加深网络深度,在每一层的卷积完成后加入了 Batch Normalization 和 ReLU 来避免梯度消失;在扩张路径上进行了改进,完整引入了 Encoder-Deconder 结构,用 skip 的方法使扩张路径与收缩路径建立联系,更细化了网络的输出

 浙公网安备 33010602011771号
浙公网安备 33010602011771号