基础矩阵知识 旋转-平移-投影-缩放-LookAt
在学习之前我默认我们有基本的线性代数认识。
计算机图形学基础
领域:计算机科学
关键概念:
• 坐标系
• 矩阵变换
• 三维投影
计算机图形学数学基础
笛卡尔坐标系
笛卡尔坐标系(Cartesian coordinate system)由法国数学家笛卡尔于1637年提出
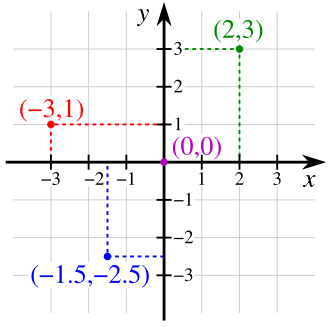
如图 :直角坐标系。图中四点的坐标分别为,
绿点:(2, 3),红点:(−3, 1),
蓝点:(−1.5, −2.5),紫点:(0, 0)。
当然我们的GLGS中一般使用的是三维笛卡尔坐标系。一般使用VEC3做表示
数学表示
二维坐标系中的点表示为:
P = (x, y) ∈ ℝ²
齐次坐标系
齐次坐标(Homogeneous coordinates)由August Ferdinand Möbius于1827年提出
其实目的就是为了更方向的在图形学上做计算。在GLGS中我们用VEC4做表示。
如下图:
| 笛卡尔坐标 | → 齐次坐标 |
|---|---|
| (x, y) | (x, y, 1) |
这是个有趣的一点,我们先不讨论齐次坐标系是什么,那为什么要加一个这样的多一个位数呢?
我们思考这样一件事,如果只用笛卡尔坐标系。我们或许很容易对其做平移,旋转,变换。
缩放
[[1*dx,0] * [[x] = [[x*dx]
[0,1*dx]] [y]] [y*dy]]
新的向量 [x*dy,y*dy]
示例:
dx=2, dy=0.5,向量(3,4) 缩放后为:
(3×2,4×0.5)=(6,2)
旋转
[[cosθ,-sinθ] * [[x] = [[x′]
[sinθ,cosθ]] [y]] [y′]]
旋转我们需要这样理解一下原式如何求得。
首先我们认为 x′=rcos(α) ,y′= rsin(α+θ)
x′=rcos(α+θ)=r(cosαcosθ−sinαsinθ)=xcosθ−ysinθ
y′=rsin(α+θ)=r(sinαcosθ+cosαsinθ)=xsinθ+ycosθ但是你会发现,它难以做平移和旋转。(注意先平移后旋转和先旋转再平移完全是两个结果)
需要一个加发和一个旋转乘法,这里我就不再赘述了。
那么如果加上一坐标系,这个坐标系并不对原本坐标系发生转变,但在计算的时候可以对其有较方便的影响,所以我们将使用其次坐标系去解决问题。
基础变换矩阵
平移矩阵
| 1 | 0 | tx |
| 0 | 1 | ty |
| 0 | 0 | 1 |
如上齐次坐标:
我们做简单的平移
[[1,0,tx], [[x] [[x*1+0+tx],
[0,1,ty], * [y] = [0+y*1+ty],
[0,0,1]] [1]] [0+0+1 ]]这里我们发现,它可以平移了!齐次方程真的很方便。
三维旋转矩阵
三维旋转矩阵(齐次坐标)
1. 绕X轴旋转(角度θ)
| 1 | 0 | 0 | 0 |
| 0 | cosθ | -sinθ | 0 |
| 0 | sinθ | cosθ | 0 |
| 0 | 0 | 0 | 1 |
实例:绕X轴旋转90°
点 P = (0, 1, 0) 的齐次坐标为 [0, 1, 0, 1]T
| 1 | 0 | 0 | 0 |
| 0 | 0 | -1 | 0 |
| 0 | 1 | 0 | 0 |
| 0 | 0 | 0 | 1 |
计算结果:
| 0 |
| 0 |
| 1 |
| 1 |
→ 变换后坐标 P' = (0, 0, 1)
2. 绕Y轴旋转(角度θ)
| cosθ | 0 | sinθ | 0 |
| 0 | 1 | 0 | 0 |
| -sinθ | 0 | cosθ | 0 |
| 0 | 0 | 0 | 1 |
实例:绕Y轴旋转90°
点 P = (1, 0, 0) 的齐次坐标为 [1, 0, 0, 1]T
| 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 |
| -1 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 |
计算结果:
| 0 |
| 0 |
| -1 |
| 1 |
→ 变换后坐标 P' = (0, 0, -1)
3. 绕Z轴旋转(角度θ)
| cosθ | -sinθ | 0 | 0 |
| sinθ | cosθ | 0 | 0 |
| 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 |
实例:绕Z轴旋转90°
点 P = (1, 0, 0) 的齐次坐标为 [1, 0, 0, 1]T
| 0 | -1 | 0 | 0 |
| 1 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 1 |
计算结果:
| 0 |
| 1 |
| 0 |
| 1 |
→ 变换后坐标 P' = (0, 1, 0)
关键点总结
- 齐次坐标通过添加第四维(值为1)统一变换操作
- 旋转矩阵第四行固定为 [0, 0, 0, 1]
- 遵循右手旋转法则(拇指指向轴的正方向)
这里我直接承接平移一个新的承接旋转平移的方法。
例如对点对其向量 (1,0,1,1) 平移 x->2,y->3,并绕着y轴旋转60°,我们可以只用一个矩阵解决
[cosθ, 0 ,sinθ,2 ]
[0 , 1 , 0 ,3 ]
[-sinθ,0 ,cosθ,0 ]
[ 0, 0, 0, 1 ]后面我们会学习一种叫做欧拉角和四元数的旋转矩阵,这将更为方便使用。
LookAt矩阵
这是一种专注于目标点和相机本身的一种矩阵。围绕目标点做矩阵变换。
viewMatrix = [
[Rx, Ry, Rz, -eye·R],
[Ux, Uy, Uz, -eye·U],
[Dx, Dy, Dz, -eye·D],
[0, 0, 0, 1]
]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号