ROS 通信中常用的 API
第三章 ROS 通信进阶
3.1 ROS 通信中常用的 API
3.1.1 初始化
函数:
ros::init(argc,argv,"节点名称".[opt]);
作用:
初始化 ROS 节点
参数:
| 参数名称 | 作用 |
|---|---|
| argc | 封装实参个数(n+1) |
| argv | 封装参数的数组 |
| name | 为节点命名(唯一性) |
| options | 节点启动选项 |
返回值:void
使用:
- argc yu argv 的使用
如果按照ROS中的特定格式传入实参,那么ROS可以加以使用,比如可以用来设置全局参数、给节点重命名...
传递全局参数:
rosrun [包名] [节点名] _[参数名]:=[参数值]
- options 的使用
节点名称需要保证唯一性,会导致一个问题,同一个节点不能重复启动。当一个重复的节点被启动两次,第二次启动会导致第一次节点的shutdown。但是有些特定的场景下,一个节点需要被启动多次,并且要可以正常运行。这时,我们就需要使用options。使用方法,在调用函数的时候输入:
ros::init(argc,argv,"节点名",ros::init_options::AnonymousName);
这样在创建ROS节点时,会在用户自定义的节点名称后缀随机数,从而避免重名问题。
3.1.2 话题对象
函数:
ros::NodeHandle nh;
nh.advertise<>("topic",queue_size,latch);
作用:
创建发布者对象。
模板:
被发布对象的类型
参数:
| 参数名称 | 作用 |
|---|---|
| topic | 话题名称 |
| queue_size | 队列长度 |
| latch(可选) | 默认为false,如果是true,会保存发布方的最后一个消息,并且新的订阅对象连接到发布方时,发布方会将这条消息发布给订阅者 |
使用:
latch 设置为true的作用:
以静态地图发布为例,方案1:可以使用固定频率发送地图数据,但是效率低;方案2: 可以将地图发布对象的 latch 设置为 true,并且发布方只发送一次数据,每当订阅者连接时,将地图数据发送给订阅者(只发送一次),从而提高了数据的发送效率。
nh.advertise<std::String>("House",10,true);
这样将发布方的最后一个数据发送给订阅节点。
3.1.3 回旋函数(这里我直接抄了老师的笔记)
- spinOnce()
/**
* \brief 处理一轮回调
*
* 一般应用场景:
* 在循环体内,处理所有可用的回调函数
*
*/
ROSCPP_DECL void spinOnce();
- spin()
/**
* \brief 进入循环处理回调
*/
ROSCPP_DECL void spin();
- 二者比较
相同点:二者都用于处理回调函数;
不同点:ros::spin() 是进入了循环执行回调函数,而 ros::spinOnce() 只会执行一次回调函数(没有循环),在 ros::spin() 后的语句不会执行到,而 ros::spinOnce() 后的语句可以执行。
3.1.3 时间
需求:
演示时间相关操作,获取当前时间 + 设置指定时刻
实现:
- 准备(头文件、节点初始化、NodeHandle 创建...)
- 获取当前时间
- 设置指定时刻
- 设置持续时间
- 时间之间的运算
#include "ros/ros.h"
/*
需求1:
演示时间相关的操作:获取当前时刻 + 设定制定时刻
实现:
1. 准备(头文件、节点初始化、NodeHandle创建...)
2. 获取当前时刻
3. 设置指定时刻
需求2:
让程序执行中停顿 5 秒钟
实现:
1. 创建持续时间对象;
2. 休眠。
需求3:
对时间进行运算。
实现:
1. ros::Time 之间的减法
2. ros::Duration 之间的加减
3. Time 与 Duration 之间的加减
需求4:
每隔1秒,在控制台输出一段文本。
实现:
1. 利用ros::rate() 学过了
2. 利用定时器
创建: nh.createTimer()
参数1: 时间间隔
参数2: 回调函数(时间事件 TimerEvent)
参数3: 是否只执行一次
参数4: 是否自动启动(默认是true,如需手动启动使用 timer.start())
定时器启动后: ros::spin()
*/
// 回调函数
void cb(const ros::TimerEvent& event)
{
ROS_INFO("-----------------");
ROS_INFO("函数被调用的时刻:%.2f",event.current_real.toSec());
}
int main(int argc, char *argv[])
{
// 1. 准备
setlocale(LC_ALL,"");
ros::init(argc,argv,"Hello_time");
ros::NodeHandle nh; // 与时间相关的函数必须有NodeHandle
// 2. 获取当前时刻
// now 函数会将当前时刻封装并返回
// 当前时刻:是指 now 被调用执行的那一刻
// 参考系: 1970年01月01日 00:00:00 中国是:GMT+8
// 输出为距离参考系的时间
ros::Time right_now = ros::Time::now();
ROS_INFO("当前时刻:%.2f",right_now.toSec());
ROS_INFO("当前时刻:%d",right_now.sec);
// 3. 设置指定时刻
ros::Time t1(20,312345678);
ROS_INFO("t1 = %.2f",t1.toSec());
// 持续时间
ROS_INFO("---持续时间---");
ros::Time start = ros::Time::now();
ROS_INFO("开始休眠");
// 设置睡眠时间
ros::Duration(4).sleep();
ros::Time end = ros::Time::now();
ROS_INFO("休眠结束,共%.2f秒", end.toSec()-start.toSec());
// 时间之间的运算
ROS_INFO("---时间运算---");
ros::Time now = ros::Time::now();
ros::Duration du1(10);
ros::Duration du2(20);
ROS_INFO("当前时刻:%.2f",now.toSec());
//1.time 与 duration 运算
ros::Time after_now = now + du1;
ros::Time before_now = now - du1;
ROS_INFO("当前时刻之后:%.2f",after_now.toSec());
ROS_INFO("当前时刻之前:%.2f",before_now.toSec());
//2.duration 之间相互运算
ros::Duration du3 = du1 + du2;
ros::Duration du4 = du1 - du2;
ROS_INFO("du3 = %.2f",du3.toSec());
ROS_INFO("du4 = %.2f",du4.toSec());
//PS: time 与 time 不可以相加运算
// ros::Time nn = now + before_now;//异常
ros::Duration du5 = now - before_now;
ROS_INFO("时刻相减:%.2f",du5.toSec());
// 定时器
ROS_INFO("---定时器---");
// ros::Timer createTimer(ros::Duration period, // 设置间隔时间
// const ros::TimerCallback &callback, // 回调函数 -- 封装业务
// bool oneshot = false, // 是否是一次性
// bool autostart = true) // 自动回调
// ros::Timer timer = nh.createTimer(ros::Duration(1),cb);
// ros::Timer timer = nh.createTimer(ros::Duration(1),cb,true);
ros::Timer timer = nh.createTimer(ros::Duration(1),cb,false,false);
timer.start(); //手动启动定时器
ros::spin();
return 0;
}
3.1.4 其他函数
- 节点状态判断(一般在循环体中使用)
ros::ok
- 关闭节点(一般在条件体中使用)
ros::shotdown()
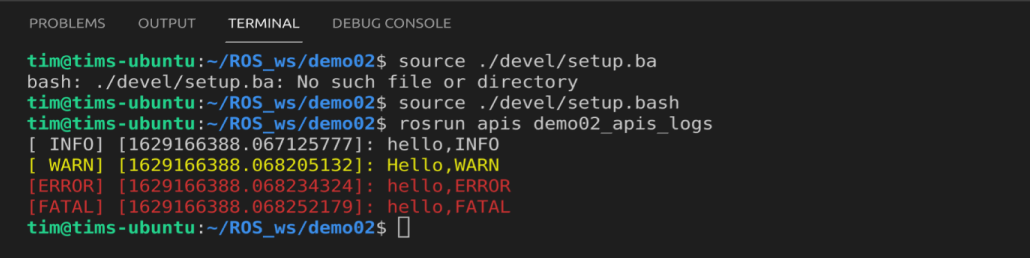
- 日志类的函数
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"logs");
ros::NodeHandle nh;
ROS_DEBUG("hello,DEBUG"); //不会输出
ROS_INFO("hello,INFO"); //默认白色字体
ROS_WARN("Hello,WARN"); //默认黄色字体
ROS_ERROR("hello,ERROR");//默认红色字体
ROS_FATAL("hello,FATAL");//默认红色字体
return 0;
}
程序输出:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号